Chamboulement du planning. Les informaticiens avancent bien plus rapidement que prÃĐvu. JEKERT est encore loin du freinage de mise en orbite. Aussi, la direction a rÃĐuni les utilisateurs et les programmeurs. Puisque les ingÃĐnieurs logiciel disposent de bien plus de temps que prÃĐvu, fait assez rare dans le domaine de l’astronautique pour Être soulignÃĐ, les divers participants à la rÃĐunion ont mis en commun leurs spÃĐcificitÃĐs pour ajouter au cahier des charges fonctionnels des fonctions qui n’avaient pas ÃĐtÃĐ envisagÃĐes initialement. Les campagnes d’essais ont montrÃĐ qu’il ÃĐtait possible d’amÃĐliorer substantiellement les outils de pilotage du petit robot. Les derniÃĻres tÃĐlÃĐmesures montrent qu’il hiberne parfaitement. Tous va bien pour JEKERT. Nous retournons en salle S4.
AmÃĐliorer la lisibilitÃĐ du programme.
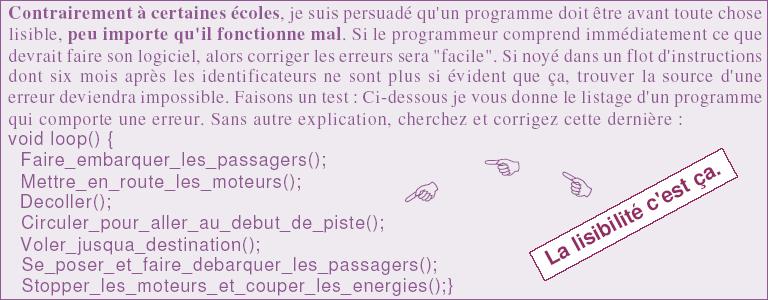
Graphismes dÃĐsirÃĐs en place, petit tableau de bord affichÃĐ en temps rÃĐel, SÃCURITà à tout va et tout y quanti … rien à faire, nous n’en sommes qu’à 80% d’utilisation de l’espace rÃĐservÃĐ au programme dans le circuit ATmega328. Au sens de la rentabilitÃĐ c’est encore tristounet. Plus exactement, ayant assouvi nos dÃĐsirs ÂŦ graphiques Âŧ, il nous reste encore beaucoup de place pour perfectionner le pupitre. Les chapitres qui suivent seront consacrÃĐs aux nouvelles fonctions. Toujours affectÃĐs des dÃĐfauts de prÃĐsentation des logiciels prÃĐcÃĐdents, ce sont P21N_DÃĐmonstrateur_Raquette.ino associÃĐ Ã P22N_DÃĐmonstrateur_Sonde.ino qui sont à tÃĐlÃĐcharger sur Arduino pour expÃĐrimenter les nouveautÃĐs. Un programme lisible ne doit pas contenir une boucle de base void loop() comportant des dizaines de ligne. Une bonne pratique consiste à agencer une sÃĐquence qui ne fait appel qu’à quelques procÃĐdures dont les identificateurs se lisent ÂŦ comme un livre ordinaire Âŧ. Dans les versions prÃĐcÃĐdentes, la boucle de base ÃĐtait devenue inutilisable car infiniment trop encombrÃĐe. Le remÃĻde qui s’impose a consistÃĐ Ã remplacer chaque ÂŦ bloc fonctionnel Âŧ par l’appel d’une routine indÃĐpendante. Je vous invite à consulter le nouveau listage, car P21N fait peau neuve. Et encore, si nous poussions la logique jusqu’à crÃĐer une procÃĐdure pour les clignotements, la boucle principale du programme ne contiendrait que cinq instructions. Pour la lisibilitÃĐ il serait impossible de faire mieux.
Imposer numÃĐriquement la valeur du Cap dÃĐsirÃĐ.
Initialement, cette fonction n’avait pas ÃĐtÃĐ envisagÃĐe, car imposer la valeur d’un cap oblige à saisir un nombre, et notre clavier ergonomique n’a pas de touches numÃĐriques. Ce serait envisageable, il suffirait en mode saisie que certaines touches soient affectÃĐes aux dix chiffres. Cette idÃĐe simple n’est pas exploitable, car visuellement la ÂŦ sÃĐrigraphie Âŧ du clavier deviendrait confuse, sans compter le fait que gÃĐomÃĐtriquement les touches seraient mal rÃĐparties. Aussi, quand cette possibilitÃĐ d’imposer un Cap a ÃĐtÃĐ ÃĐludÃĐe, caler le gyroscope avec la commande 59 se contentait d’affecter la valeur du Cap magnÃĐtique actuel. Si l’opÃĐrateur dÃĐsirait suivre une route particuliÃĻre, la premiÃĻre ÃĐtape consistait à faire tourner la sonde jusqu’à ce qu’elle soit correctement orientÃĐe. Ensuite, on calait le gyroscope. Le pilotage consistant alors à corriger vers la gauche ou vers la droite quand en se dÃĐplaçant JEKERT dÃĐrive. Outre que cette procÃĐdure est contraire aux concepts fondamentaux du pilotage, elle s’avÃĻre pratiquement irrÃĐalisable sur le petit insecte mÃĐcanique.
 Contraire au concepts de base de la conduite d’un mobile car ÂŦ à l’envers Âŧ. En toute logique on ajuste les systÃĻmes de navigation pour la route dÃĐsirÃĐe. Ensuite, on corrige la trajectoire en fonction des ÃĐcarts indiquÃĐs par les systÃĻmes de bord. IrrÃĐalisable, car JEKERT n’est pas un vÃĐhicule sur roues que l’on peut orienter finement en direction. La petite machine se dandine. Quand elle avance, les Griffes frottent, glissent, engendrant des dÃĐrives angulaires significatives. Quand on lui fait effectuer une rotation, l’amplitude du changement angulaire est de plusieurs degrÃĐs. Il sera impossible de l’orienter finement avec les mouvements ÃĐlÃĐmentaires. On peut utiliser la Torsion pour caler la navigation, c’est faisable et prÃĐvu dans ce but. N’est pas trÃĻs conviviale est cette mÃĐthode …
Contraire au concepts de base de la conduite d’un mobile car ÂŦ à l’envers Âŧ. En toute logique on ajuste les systÃĻmes de navigation pour la route dÃĐsirÃĐe. Ensuite, on corrige la trajectoire en fonction des ÃĐcarts indiquÃĐs par les systÃĻmes de bord. IrrÃĐalisable, car JEKERT n’est pas un vÃĐhicule sur roues que l’on peut orienter finement en direction. La petite machine se dandine. Quand elle avance, les Griffes frottent, glissent, engendrant des dÃĐrives angulaires significatives. Quand on lui fait effectuer une rotation, l’amplitude du changement angulaire est de plusieurs degrÃĐs. Il sera impossible de l’orienter finement avec les mouvements ÃĐlÃĐmentaires. On peut utiliser la Torsion pour caler la navigation, c’est faisable et prÃĐvu dans ce but. N’est pas trÃĻs conviviale est cette mÃĐthode …
Imposer un Cap MagnÃĐtique dÃĐsirÃĐ peut se faire agrÃĐablement par utilisation du codeur incrÃĐmental. Dans les items du menu EXPLOITER, avec cinq pas dans le sens nÃĐgatif à son appel, on fait afficher la fenÊtre de la Fig.325 qui validÃĐe avec le BPccr ouvre  la page de saisie. Par dÃĐfaut sur un RESET la route dÃĐsirÃĐe est plein Nord, donc un Cap MagnÃĐtique nul. C’est ce que montre la Fig.326, le code 96 servant à rÃĐcupÃĐrer la valeur initialisÃĐe sur la sonde. Comme plusieurs fois abordÃĐ, nous savons que pour des raisons de fiabilitÃĐs des informations affichÃĐes sur la console, les valeurs sont prÃĐservÃĐes sur la sonde et c’est par interrogation de cette derniÃĻre que l’on rafraÃŪchit l’ÃĐcran OLED. Les deux touches de ÂŦ dÃĐplacement latÃĐral S6 et S14 servent à dÃĐplacer en permutation circulaire le curseur d’ÃĐcriture sur les trois chiffres du Cap. (Trois chiffres significatifs sont affichÃĐs systÃĐmatiquement avec ÃĐventuellement des zÃĐros en tÊte.) Ce curseur symbolisÃĐ par une flÃĻche verticale indique le chiffre qui sera modifiÃĐ si on tourne le codeur rotatif quand on est en mode de saisie de la route souhaitÃĐe. Quand le codeur incrÃĐmental est manipulÃĐ dans un sens ou dans l’autre, on a l’impression visuelle que seul le chiffre pointÃĐ est modifiÃĐ. En rÃĐalitÃĐ, on agit sur un nombre, c’est à dire que l’entitÃĐ complÃĻte est augmentÃĐe ou diminuÃĐe. Par exemple faire un pas nÃĐgatif d’une unitÃĐ quand le cap vaut 100° fait passer l’affichage à 099°. En nÃĐgatif une butÃĐe virtuelle bloque la valeur à zÃĐro. En positif, si arrivÃĐ Ã 359° on tourne le capteur dans le sens horaire, quel que soit le chiffre indexÃĐ la valeur repasse à 000°. La sortie du mode ÂŦ Saisie du cap pour la route souhaitÃĐe Âŧ se fait impÃĐrativement avec FIN. Pour des raisons de convivialitÃĐ la saisie du cap s’ouvre avec l’index sur un Poids_Decimal = 10. Tout B.P. autre que FIN, S6 et S14 gÃĐnÃĻrent un BIP sonore d’erreur.
la page de saisie. Par dÃĐfaut sur un RESET la route dÃĐsirÃĐe est plein Nord, donc un Cap MagnÃĐtique nul. C’est ce que montre la Fig.326, le code 96 servant à rÃĐcupÃĐrer la valeur initialisÃĐe sur la sonde. Comme plusieurs fois abordÃĐ, nous savons que pour des raisons de fiabilitÃĐs des informations affichÃĐes sur la console, les valeurs sont prÃĐservÃĐes sur la sonde et c’est par interrogation de cette derniÃĻre que l’on rafraÃŪchit l’ÃĐcran OLED. Les deux touches de ÂŦ dÃĐplacement latÃĐral S6 et S14 servent à dÃĐplacer en permutation circulaire le curseur d’ÃĐcriture sur les trois chiffres du Cap. (Trois chiffres significatifs sont affichÃĐs systÃĐmatiquement avec ÃĐventuellement des zÃĐros en tÊte.) Ce curseur symbolisÃĐ par une flÃĻche verticale indique le chiffre qui sera modifiÃĐ si on tourne le codeur rotatif quand on est en mode de saisie de la route souhaitÃĐe. Quand le codeur incrÃĐmental est manipulÃĐ dans un sens ou dans l’autre, on a l’impression visuelle que seul le chiffre pointÃĐ est modifiÃĐ. En rÃĐalitÃĐ, on agit sur un nombre, c’est à dire que l’entitÃĐ complÃĻte est augmentÃĐe ou diminuÃĐe. Par exemple faire un pas nÃĐgatif d’une unitÃĐ quand le cap vaut 100° fait passer l’affichage à 099°. En nÃĐgatif une butÃĐe virtuelle bloque la valeur à zÃĐro. En positif, si arrivÃĐ Ã 359° on tourne le capteur dans le sens horaire, quel que soit le chiffre indexÃĐ la valeur repasse à 000°. La sortie du mode ÂŦ Saisie du cap pour la route souhaitÃĐe Âŧ se fait impÃĐrativement avec FIN. Pour des raisons de convivialitÃĐ la saisie du cap s’ouvre avec l’index sur un Poids_Decimal = 10. Tout B.P. autre que FIN, S6 et S14 gÃĐnÃĻrent un BIP sonore d’erreur.
RÃĐfÃĐrence MagnÃĐtique, rÃĐfÃĐrence Gyroscopique.
Information secondaire, la rÃĐfÃĐrence Gyroscopique interne est une donnÃĐe technique qui concerne plus la maintenance que la gestion du robot sur le sol de Mars. Quand le mode affichage continu des donnÃĐes est actif et que l’on visualise le petit tableau de bord graphique, chaque action sur le BPccr change la rÃĐfÃĐrence. Lorsque c’est la route magnÃĐtique initialisÃĐe par la procÃĐdure dÃĐcrite dans le chapitre prÃĐcÃĐdent qui est prise en compte, la lettre M indique clairement que c’est le Cap MagnÃĐtique actuel comparÃĐ Ã la Route MagnÃĐtique dÃĐsirÃĐe qui gÃĐnÃĻrent la valeur de l’Ecart de route. Si on clique sur le BPccr la rÃĐfÃĐrence devient alors la donnÃĐe interne du MPU-6050 associÃĐe au gyroscope de Lacet. La lettre M est changÃĐe par G pour informer l’opÃĐrateur de l’option en cours. Cette rÃĐfÃĐrence est initialisÃĐe chaque fois que l’on valide dans le menu EXPLOITER l’item Calage GYRO. qui prend une valeur qui n’a rien à voir avec l’orientation en Lacet de la sonde. On peut considÃĐrer que cette valeur dÃĐpend de l’orientation du moment par rapport à l’univers. L’Ecart de route correspond alors à la diffÃĐrence entre l’orientation en Lacet actuelle et cette valeur prÃĐalablement enregistrÃĐe. En rÃĐfÃĐrence Gyroscopique on affiche bien un ÃĐcart d’orientation entre la direction initiale et celle actuelle de la sonde, MAIS PAR RAPPORT AUX ÃTOILES. La rotation de l’astre sur lequel se trouve la sonde intervient comme dÃĐjà explicitÃĐ en dÃĐtails dans le chapitre sur la dÃĐrive gyroscopique. On peut considÃĐrer que la rÃĐfÃĐrence Gyroscopique conduit à une observation absolue par rapport à l’Univers, alors que la rÃĐfÃĐrence MagnÃĐtique est relative par rapport à l’astre sur lequel se trouve posÃĐ JEKERT. L’opÃĐrateur prÃĐfÃĻre gÃĐnÃĐralement se repÃĐrer par rapport à l’environnement local, il privilÃĐgie en standard le Cap MagnÃĐtique pour s’orienter.
UtilitÃĐ pratique de la rÃĐfÃĐrence Gyroscopique.
Puisque par nature la rÃĐfÃĐrence magnÃĐtique est plus facile à prendre en compte par le pilote de la sonde, pourquoi se prÃĐoccuper de cette rÃĐfÃĐrence interne qui s’oriente par rapport à l’Univers et ignore le lieu sur lequel on se trouve ? Plusieurs raisons techniques viennent plaider sa cause. Initialement, le Gyroscope vient remplacer le compas magnÃĐtique quand ce dernier n’est plus crÃĐdible. Par exemple, quand sur un petit avion on engage un virage standard, on incline l’appareil en roulis. Si à cette inclinaison acquise relativement vite on ajoute de plus des turbulences, la boussole s’affole. Un navire, mÊme de taille imposante, peut se faire chahuter fortement en roulis et en tangage par une mer forte. (Rien n’est grand par rapport à la mer.) Le compas de route dans ces conditions se dandine avec frÃĐnÃĐsie. Dans ces exemples, le gyroscope reste de ÂŦ marbre Âŧ. C’est l’outil idÃĐal pour assurer la navigation … sauf qu’il dÃĐrive car la Terre tourne par rapport à sa rÃĐfÃĐrence universelle. C’est alors le compas de route, quand il n’est pas perturbÃĐ, qui sert pour le pilote à recaler le gyroscope de bord. Il est clair qu’avec l’avÃĻnement du GPS, surtout comparÃĐ au coÃŧt important d’un gyroscope mÃĐcanique, les conservateurs de cap ÂŦ à l’ancienne Âŧ sont en voie de disparition …
Reste que la centrale gyroscopique est bien plus prÃĐcise que la boussole. Nous savons que celle utilisÃĐe à bord de JEKERT est corrigÃĐe, le calcul assurant cette fonction conduit à une imprÃĐcision angulaire de plusieurs degrÃĐs. Enfin, notre petit robot est aussi un vaisseau spatial. Ces machines que l’on ÃĐjecte à des distances phÃĐnomÃĐnales se dÃĐplacent loin loin loin de tout astre. Pour les orienter en vue d’effectuer les corrections de trajectoire ou pour le freinage de capture gravitationnelle pour se mettre en orbite, elles n’ont que les ÃĐtoiles pour faire le point. La centrale gyroscopique est alors la technologie incontournable pour assurer la navigation et ce d’autant plus qu’il n’y a plus prÃĐsence de champs magnÃĐtiques pour orienter une boussole.
* Par dÃĐfaut, sur un RESET de l’ATmega328, c’est le Cap MagnÃĐtique qui est initialisÃĐ, correspondant à une donnÃĐe plus opÃĐrationnelle que celle de la rÃĐfÃĐrence gyroscopique.
* La page de navigation dans le menu des DONNEES continue à afficher la valeur gyroscopique mÊme si l’on est en option rÃĐfÃĐrence MagnÃĐtique car ce menu concerne la maintenance. C’est donc la dÃĐrive de l’Ecart gyroscopique qui observÃĐe à divers moments permet de s’assurer du bon fonctionnement de la centrale de navigation MPU-6050.
Calculer l’Ecart de route avec la convention Âą180°.
IllustrÃĐ par les Fig.319 et Fig.320 le chapitre Faciliter le travail du navigateur consiste à raisonner en relatif à exprimÃĐ en dÃĐtails l’avantage à placer ÂŦ en haut Âŧ la direction dans laquelle on dÃĐsire aller. Puis, par rapport à cette route souhaitÃĐe, effectuer une dichotomie Gauche / Droite pour indiquer l’ÃĐcart de route avec les valeurs 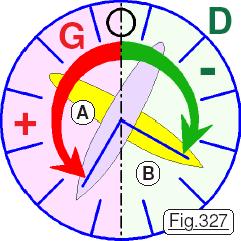 limitÃĐes à +179° / -180°. Pour mÃĐmoire, la Fig.327 rÃĐsume le but à atteindre. Le petit cercle noir nommÃĐ parfois ÂŦ bug Âŧ quand on parle d’un index spÃĐcifique à l’aviation, prÃĐcise sur la rose des vents la direction que l’on dÃĐsire emprunter. Par rapport à cette direction, on affecte par convention à gauche le signe positif, et à droite le signe nÃĐgatif. L’ÃĐcart de route sera ainsi limitÃĐ en amplitude à 180°. Par exemple, sur la Fig.327 E sera ÃĐgal à +150° pour le navire cas A et -120° pour la direction B. Pour calculer la valeur de l’ÃĐcart, il serait possible de partir de la dÃĐfinition E = Cap actuel – Cap dÃĐsirÃĐ. Si on dÃĐpasse 180° on prend la diffÃĐrence avec 360°. Puis on affecte le signe conventionnel. Cette approche qui se rÃĐsume à une soustraction et deux comparaisons semble idÃĐale de simplicitÃĐ. Testez et vous allez vous rendre compte que l’on ne peut pas faire aussi ÃĐlÃĐmentaire. Soit les amplitudes calculÃĐes ne sont pas bonnes, soit le signe ne convient pas. J’ai pourtant effectuÃĐ de nombreux tests, alignÃĐ du code à profusion : Rien à faire, pas moyen de traiter par des calculs !
limitÃĐes à +179° / -180°. Pour mÃĐmoire, la Fig.327 rÃĐsume le but à atteindre. Le petit cercle noir nommÃĐ parfois ÂŦ bug Âŧ quand on parle d’un index spÃĐcifique à l’aviation, prÃĐcise sur la rose des vents la direction que l’on dÃĐsire emprunter. Par rapport à cette direction, on affecte par convention à gauche le signe positif, et à droite le signe nÃĐgatif. L’ÃĐcart de route sera ainsi limitÃĐ en amplitude à 180°. Par exemple, sur la Fig.327 E sera ÃĐgal à +150° pour le navire cas A et -120° pour la direction B. Pour calculer la valeur de l’ÃĐcart, il serait possible de partir de la dÃĐfinition E = Cap actuel – Cap dÃĐsirÃĐ. Si on dÃĐpasse 180° on prend la diffÃĐrence avec 360°. Puis on affecte le signe conventionnel. Cette approche qui se rÃĐsume à une soustraction et deux comparaisons semble idÃĐale de simplicitÃĐ. Testez et vous allez vous rendre compte que l’on ne peut pas faire aussi ÃĐlÃĐmentaire. Soit les amplitudes calculÃĐes ne sont pas bonnes, soit le signe ne convient pas. J’ai pourtant effectuÃĐ de nombreux tests, alignÃĐ du code à profusion : Rien à faire, pas moyen de traiter par des calculs !
C’est la deuxiÃĻme fois que confrontÃĐ Ã ce type de problÃĻme, je n’ai pas rÃĐussi à trouver un algorithme de calcul relativement simple. Dans une telle situation, il faut bien trouver une solution. Pour ma part je fais alors appel à des boucles pour simuler le phÃĐnomÃĻne. Pour qu’une telle solution soit raisonnable il importe que la boucle de dÃĐtermination ne comporte pas trop d’itÃĐrations, car alors le temps de calcul deviendrait prohibitif et ce d’autant plus que dans cette application ludique on dÃĐsire un affichage en temps rÃĐel.
ConsidÃĐrons le listage de la procÃĐdure qui sert à calculer l’ÃĐcart de route. Quand on fait appel à cette subroutine, prÃĐalablement la variable Angle est initialisÃĐe à la valeur du Cap MagnÃĐtique actuel d’orientation de la sonde. La variable Ecart_gyroscopique va servir à calculer la grandeur de l’ÃĐcart de route, limitÃĐe à une amplitude maximale de 180°, et affectÃĐe du signe conventionnel, quel que soient au dÃĐpart les valeurs de l’entier Angle codÃĐ sous la forme d’un int et de l’entier Cap_magnetique_de_consigne ÃĐgalement prÃĐservÃĐ dans un int. Dans le premier cas le choix d’un int se justifie car la valeur manipulÃĐe peut aller jusqu’à 359 et dÃĐpasse donc les 124 d’un byte. Ecart_gyroscopique quand à lui ne dÃĐpassera pas 180. Toutefois un byte ne peut contenir cette variable, car elle est signÃĐe. (SignÃĐe au sens de signe algÃĐbrique.)
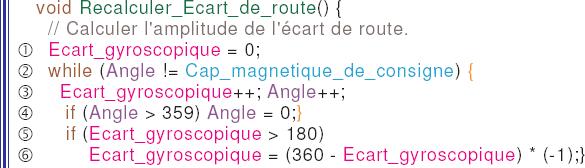
L’idÃĐe pour dÃĐterminer la valeur d’Ecart_gyroscopique consiste à imaginer que l’on est actuellement dans la bonne direction, donc en (1) on indique une dÃĐviation nulle. Puis on simule une rotation du vaisseau, arbitrairement dans le sens positif. En ligne (3) Ecart_gyroscopique augmente de 1° ainsi que la valeur Angle. En (4) on ÂŦ franchit Âŧ la valeur 360, donc on recycle à zÃĐro. Puis, en (2) on recommence tant que l’orientation fictive n’est pas ÃĐgale à la direction souhaitÃĐe. Le programme sort alors de la boucle while. Enfin, l’instruction (5) dÃĐtecte si l’on a tournÃĐ de plus d’un demi-tour. Si c’est le cas, en (6) on recalcule le complÃĐment à 360 et l’on inverse le signe. Dans le pire des cas, la boucle sera parcourue 359 fois. Elle ne compote que deux petites additions binaires et une comparaison. Compte tenu de la rapiditÃĐ de fonctionnement de 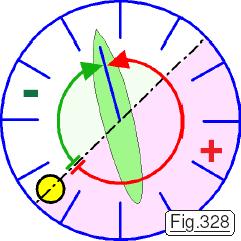 l’ATmega328, le temps pour effectuer cette simulation reste dÃĐrisoire : Solution adoptÃĐe. Pour faciliter l’analyse à ceux qui le dÃĐsirent, la Fig.328 rÃĐsume la mÃĐthode utilisÃĐe, sauf que cette fois le dessin dÃĐcrit la scÃĻne le Nord ÃĐtant conventionnellement vers le haut. La route souhaitÃĐe correspond aux 225° de la Fig.315 et nous ÃĐvoluons actuellement au 355°.
l’ATmega328, le temps pour effectuer cette simulation reste dÃĐrisoire : Solution adoptÃĐe. Pour faciliter l’analyse à ceux qui le dÃĐsirent, la Fig.328 rÃĐsume la mÃĐthode utilisÃĐe, sauf que cette fois le dessin dÃĐcrit la scÃĻne le Nord ÃĐtant conventionnellement vers le haut. La route souhaitÃĐe correspond aux 225° de la Fig.315 et nous ÃĐvoluons actuellement au 355°.
1) Calculer par incrÃĐments de 1° la grandeur de l’ÃĐcart ici montrÃĐ par la flÃĻche courbe rouge,
2) Si l’angle dÃĐpasse 359 degrÃĐs le forcer à zÃĐro,   (Ici ce n’est pas le cas.)
3) Quand la flÃĻche rouge = le Cap actuel du vaisseau stopper l’ÃĐvolution, (Ici Ecart = 240°)
4) Si Ecart > 180 recalculer : Ecart = 360 – Ecart = 120, et changer de signe.
(Dans notre exemple on trouve -120° qui correspond bien à la flÃĻche courbe verte sur le dessin.)
ATTENTION : Avec une ou deux petites formules, vous aller coder un calcul et voir que ça fonctionne. Du coup vous en dÃĐduirez que Nulentout s’est fourvoyÃĐ. Les cas particuliers sont nombreux, les piÃĻges variÃĐs. Pour savoir si votre programme est correct, il faut impÃĐrativement ÃĐtablir un jeu d’essais exhaustif. Le tableau donnÃĐ ci-contre propose ma campagne de vÃĐrification. Toutes ces variantes rÃĐflÃĐchies ont ÃĐtÃĐ soigneusement vÃĐrifiÃĐes. Surtout ne pas imaginer que 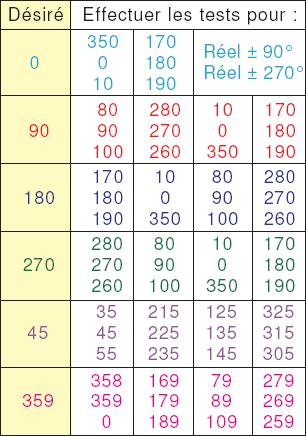 moins de vÃĐrifications suffise.
moins de vÃĐrifications suffise.
Optimisation de la saisie du cap magnÃĐtique dÃĐsirÃĐ.
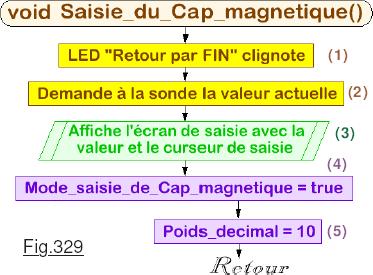 Optimiser le code fait partie de la routine du programmeur. Toutefois, pour saisir la valeur de la route dÃĐsirÃĐe et l’indiquer à la sonde, plusieurs spÃĐcificitÃĐs viennent particulariser cette fonction. Il n’est pas question d’envoyer la valeur chaque fois qu’elle change lorsque le codeur rotatif fait un pas. Les ÃĐchanges ÂŦ radio Âŧ entre le pupitre et la sonde seraient trop nombreux et ralentiraient le processus. L’ouverture du mode saisie de Cap fait appel à la procÃĐdure void Saisie_du_CAP_magnetique() dont la Fig.329 reprÃĐsente globalement le dÃĐroulement. En (1) on prÃĐvient l’opÃĐrateur qu’il faut sortir par la touche FIN. Puis en (2) la valeur actuelle prÃĐservÃĐe dans JEKERT est tÃĐlÃĐchargÃĐe en envoyant le code 96. En (3) l’ÃĐcran de l’afficheur OLED est effacÃĐ et la page de saisie est affichÃĐe, y compris le pointeur du caractÃĻre qui sera modifiÃĐ. En (4) on informe la boucle de base que le mode de saisie d’un CAP est en cours ce qui conditionnera le comportement de la procÃĐdure qui traite le codeur incrÃĐmental. Enfin en (5) on prÃĐcise que par dÃĐfaut c’est le chiffre des dizaines qui sera modifiÃĐ.
Optimiser le code fait partie de la routine du programmeur. Toutefois, pour saisir la valeur de la route dÃĐsirÃĐe et l’indiquer à la sonde, plusieurs spÃĐcificitÃĐs viennent particulariser cette fonction. Il n’est pas question d’envoyer la valeur chaque fois qu’elle change lorsque le codeur rotatif fait un pas. Les ÃĐchanges ÂŦ radio Âŧ entre le pupitre et la sonde seraient trop nombreux et ralentiraient le processus. L’ouverture du mode saisie de Cap fait appel à la procÃĐdure void Saisie_du_CAP_magnetique() dont la Fig.329 reprÃĐsente globalement le dÃĐroulement. En (1) on prÃĐvient l’opÃĐrateur qu’il faut sortir par la touche FIN. Puis en (2) la valeur actuelle prÃĐservÃĐe dans JEKERT est tÃĐlÃĐchargÃĐe en envoyant le code 96. En (3) l’ÃĐcran de l’afficheur OLED est effacÃĐ et la page de saisie est affichÃĐe, y compris le pointeur du caractÃĻre qui sera modifiÃĐ. En (4) on informe la boucle de base que le mode de saisie d’un CAP est en cours ce qui conditionnera le comportement de la procÃĐdure qui traite le codeur incrÃĐmental. Enfin en (5) on prÃĐcise que par dÃĐfaut c’est le chiffre des dizaines qui sera modifiÃĐ.
Durant la boucle de base, le programme vÃĐrifie si le codeur rotatif a ÃĐtÃĐ utilisÃĐ. Si c’est la cas, alors void loop() fait appel à TRAITE_LA_ROTATION_DU_CODEUR_INCREMENTAL() qui teste quel mode est actuellement en cours. Si Mode_saisie_de_CAP_magnetique est à true alors cette procÃĐdure modifiera la valeur de l’identificateur Cap_magnetique_de_consigne en fonction du sens de rotation dÃĐtectÃĐ et de la valeur actuelle de la variable Poids_decimal.
Transmettre la valeur du cap souhaitÃĐ pose un problÃĻme particulier, qui du reste avait fortement influencÃĐ l’abandon initial de cette fonction. Au dÃĐbut du projet, un bilan pessimiste prÃĐvoyait entre trente et quarante consignes, et dÃĐjà autant de fonctions semblaient beaucoup. Pour optimiser le programme, les messages envoyÃĐs sur TX ont donc ÃĐtÃĐ envisagÃĐs avec trois caractÃĻres. Deux pour le code compris entre 1 et 40, suivi de la sentinelle ‘*‘. Et puis une idÃĐe en attire une autre. Une nouvelle fonction induit parfois plusieurs consignes. La liste s’est allongÃĐe. L’optimisation du code a repoussÃĐ en permanence les limites, et arrivÃĐ vers 90 codes il restait encore de la place pour de nouvelles sÃĐquences. Les derniÃĻres commandes ont imposÃĐ une ÃĐtude sÃĐvÃĻre, car la limite à deux chiffres pour le code imposait au maximum 99 consignes. Aussi n’imaginez-pas que le code 96 indispensable pour interroger la sonde ÃĐtait prÃĐvu d’avance. Tous les codes ÃĐtaient dÃĐjà pris. Pour dÃĐgager une consigne, diverses modifications ont ÃĐtÃĐ apportÃĐes, raison pour laquelle du reste, la rÃĐpartition des ordres dans le tableau des consignes n’est pas forcÃĐment constituÃĐe de regroupements logiques et ne respecte pas obligatoirement l’historique de leurs affectations.
ProblÃĻme : Non seulement il faut transmettre une valeur sur trois chiffres, et surtout il n’y a plus de codes disponibles dans les ÃĐtagÃĻres informatiques. La solution consiste à envoyer une consigne particuliÃĻre qui par sa structure sera diffÃĐrenciÃĐe de toutes les autres. Avant d’analyser le code reçu, l’esclave commence par tester s’il s’agit de cette derniÃĻre. La technique adoptÃĐe consiste à transmettre la consigne sous la forme d’une chaÃŪne de caractÃĻres de la forme ÂŦ Cnnn*ÂŦ . Contrairement à tous les autres messages, celui-ci commence par C indiquant qu’il s’agit d’un Cap magnÃĐtique à  enregistrer. L’esclave dÃĐtectant ce caractÃĻre en tÊte de chaÃŪne sait alors qu’il doit convertir le reste de la chaÃŪne en nombre et affecter cette valeur à Cap_magnetique_de_consigne. InvoquÃĐe quand on clique sur FIN, la sÃĐquence qui traite la transmission de cette directive se rÃĐsume à trÃĻs peu de chose :

La ligne (1) en trois instructions transmet la chaÃŪne de cinq caractÃĻres commençant par l’identificateur spÃĐcifique ‘C‘. Puis en (2) la maÃŪtre attend l’accusÃĐ de rÃĐception retournÃĐ par l’esclave. L’ÃĐcran est alors modifiÃĐ puis affichÃĐ pour informer l’opÃĐrateur de la prise en compte par la sonde. Pour finir, en ligne (3) ferme le mode de saisie et ÃĐteint la LED clignotante jaune.
La suite est ici.