Bon
Etude du système d'oracid avec mon schémas légèrement modifié en partant de celui proposé par Oracid.
1° On effectue un BAME ( Bilan des actions mécaniques extérieurs )
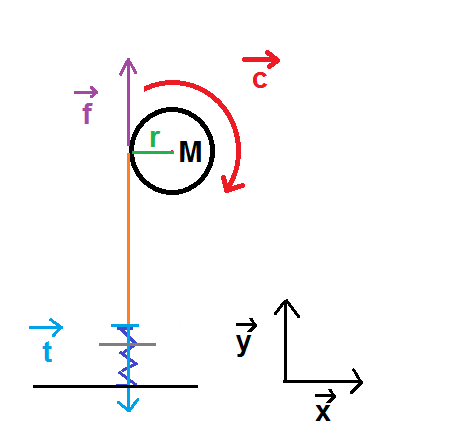
Je choisis de représenter les efforts exercés sur la corde. Je suppose qu'on est dans un cas " statique" et qu'il n'y a pas de frottements.
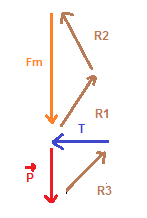
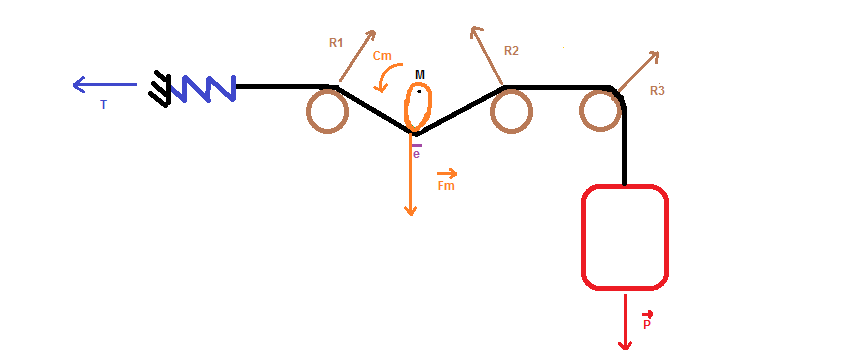
- Poids de la masse sur la corde selon l'axe y P en rouge
- Efforts des roulements sur la cordes. R1 R2 et R3 en marron
- Effort du peson sur la corde selon l'axe x T en bleu
- Effort de l'excentrique sur la corde. Représenté sur l'axe y (en négligeant tout effet de frottement... ) Fm en orange
Schémas :
La somme de tous les efforts exercés sur la corde doit être nulle.
vectoriellement : R1 + R2 + Fm + R3 + T + P = 0
et Fm = Cm / e
Comme ça c'est pas facilement de réussir à calculer le tout.
Il y a beaucoup de choses qu'on ne connait pas ...
les seules données connues sont : T et P ... Bref sans ajouter de considérations on est dans une impasse...
2° ) Hypothèses :
Personnellement en procédant par analogie et superposition de cas je formulerais l'hypothèse qu'en l'absence de frottement, et en étant dans une situation statique, on a deux équations vectorielles :
R3 + T + P = 0
R1 + R2 + Fm = 0 ...
Oui selon moi comme le poids est libre, le peson devrais afficher la valeur en Kg de la masse utilisé dans le montage et ce indépendamment de l'effort exercé par le moteur!
( NB : en phase dynamique le peson devrait afficher le poids de la masse + la masse apparente signée que représente l'accélération de la masse testée , et en présence de frottement on verrais aussi les frottements parasiter la valeur donnée par le peson ... )
3°) Conclusion préliminaire
Bref autant dire que ce montage ne permet pas selon moi d'exploiter grand chose mis a part mettre en avant les phénomènes que j'ai négligé dans mon étude ... Mais ne permet pas de déduire quoi que ce soit...
4°) Ouverture
Cependant en remplaçant la masse par un point fixe ... On peut peut être obtenir quelque chose !
Il est néanmoins nécessaire dans ce cas de connaitre l'angle formé par la corde au niveau de la déformation engendré par l'effort exerce par l'excentrique...
Mais je continue de penser que la première proposition que j'ai faite est plus simple et plus efficace ...