Bonjour à tous,
Comme je le disais dans un autre sujet, cela fait deux ans que je travaille à la réalisation d'un sous-marin filoguidé et j'aimerais vous présenter mon projet. Celui-ci se nomme L.Y.S. pour Little Yellow Submarine (comme dans le titre du sujet, c'est fou ça !) à la fois pour la référence (facile) à une chanson bien connue mais aussi parce que j'aimais bien l'acronyme du projet.
Le but de ce sous-marin est de permettre de filmer et d'écouter en temps réel ce qui se passe à quelques mètres sous la surface. Accessoirement j'espère pouvoir expérimenter avec l'hydrophone que j'ai fabriqué.
Voici les règles que je me suis fixé pour mon projet :
- le coût final des pièces détachées utilisés pour le sous-marin ne doit pas dépasser les 300 €;
- le sous-marin doit emporter une caméra frontale et envoyer la vidéo en temps réel à l'opérateur;
- le sous-marin doit remonter à la surface seul en cas de panne totale de l’électronique de bord.
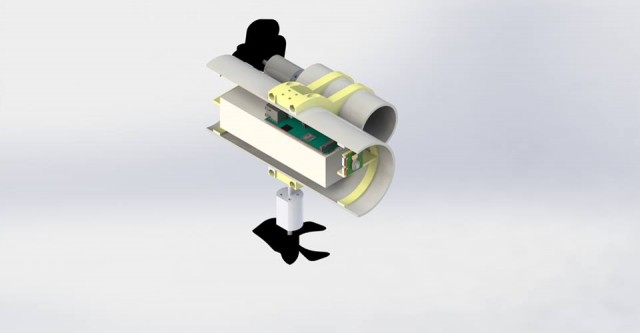
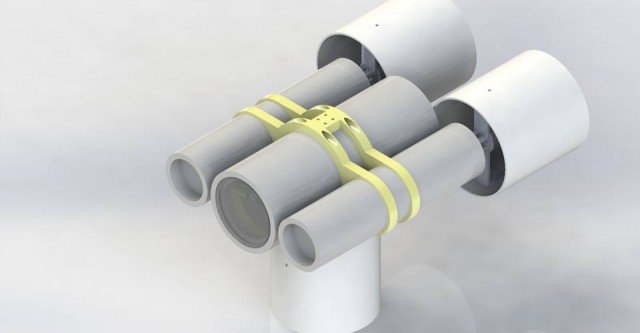
Après des heures de modélisation j'ai finalisé la conception et les plans : voici quelques rendus des différentes solutions qui ont traversé mon esprit :
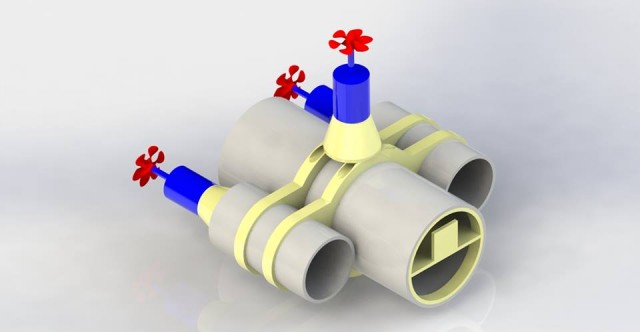
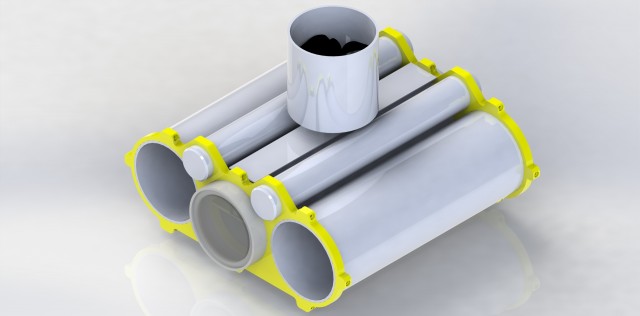
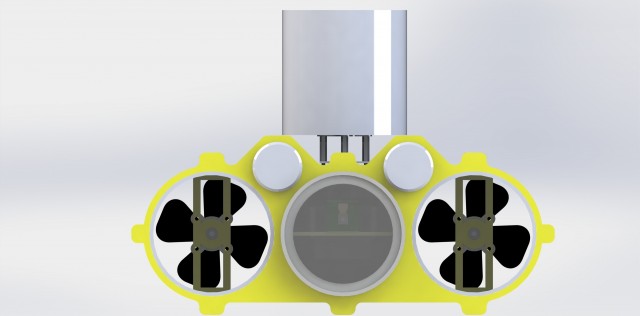
Et voici la modélisation finale :
La construction :

La première image de la caméra avec l'incrustation vidéo :
La solution définitive repose sur l'utilisation de trois moteurs brushless outrunner dont les bobines profiteront d'un traitement anti-corrosion et qui se situent à l'extérieure du compartiment étanche. Les câbles d'alimentations et le câble ethernet (pour les échanges avec l'opérateur en surface) passeront par la cloison à l'arrière du tube central.
L'étanchéité est garantie par des presses-étoupes de piscine.
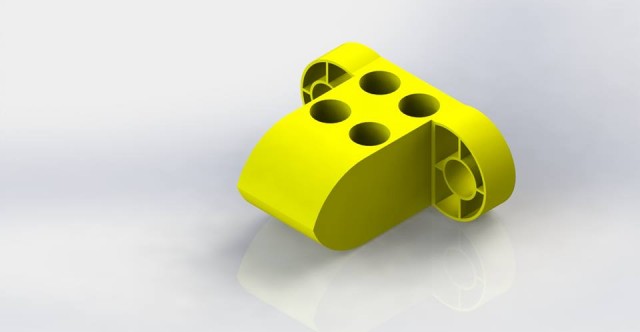
Les pièces reliant les différents tubes entre eux sont imprimés en 3D par mon imprimante.
L'électronique à bord est constituée d'une Raspberry Pi 3. Elle gère la vidéo et les signaux PWM qui sont envoyés à un régulateur de drone quadricopter. Celui-ci assure également la régulation de l'alimentation électrique.
Le tout est alimenté par une batterie LiPo 4S, 5800 mAh.
La caméra est une raspicam. Je ne compte l'utiliser que pour fournir le flux vidéo en directe. L'enregistrement se fera à l'aide d'une GoPro.
Les moteurs sont des brushless outrunner Turnigy d'une puissance de 200 W (700 kV).
Les hélices sont des Graupner quadripales de 88 mm de diamètre.
Je ne travaille sur ce projet que pendant mes (rares) heures de loisirs et la construction avance lentement.
J'espère que vous trouverez ce projet intéressant et n'hésitez pas à me faire part de vos remarques, questions et suggestions.











 )
)