Bonjour, je vais passer en première SI, et cela fait un peu moins d'un an que je suis passionné par la programmation et la robotique.
Depuis pas mal de temps, je me consacre à la réalisation d'un projet assez ambitieux.
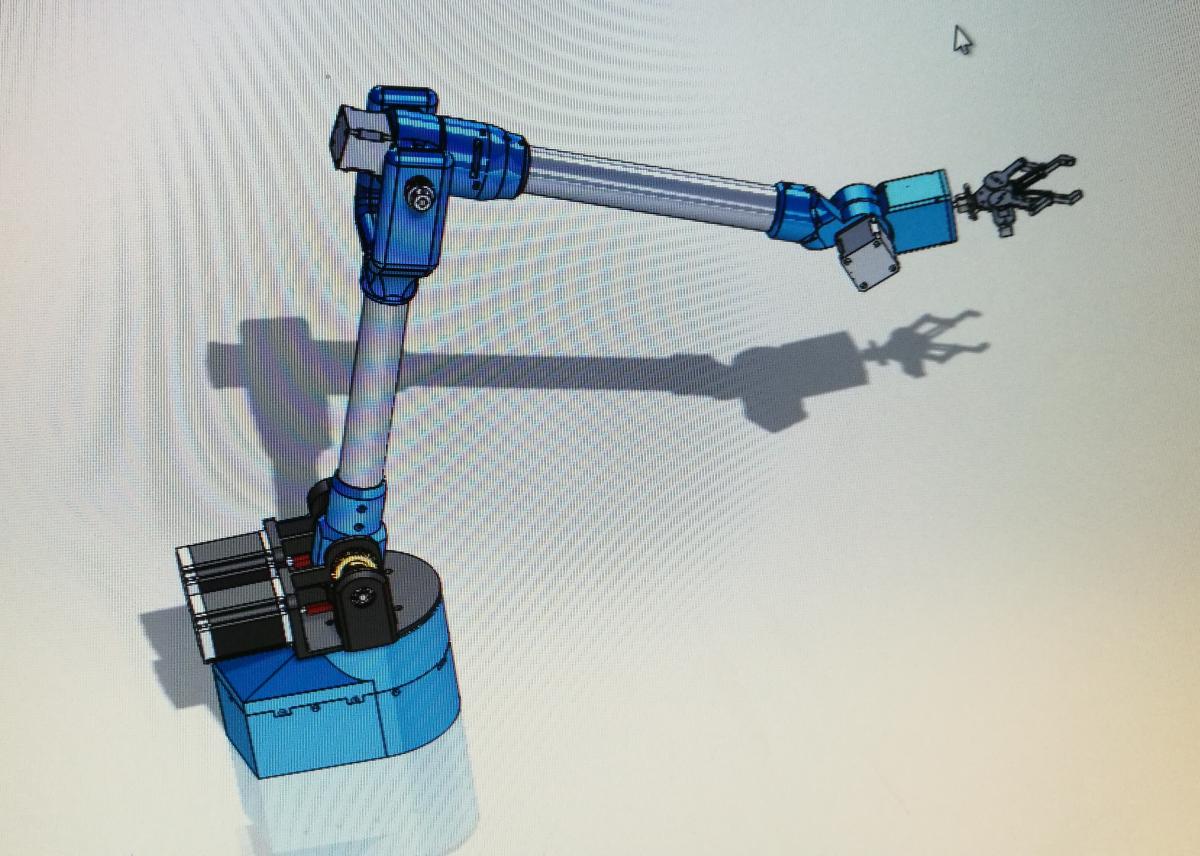
Je souhaite concevoir et réaliser un bras manipulateur composer de 6 axes (les 3 premiers sont dédiés à la position et les 3 dernier à l'orientation de l'organe manipulateur, la configuration la plus connu).
J'ai donc décidé de me procurer une tevo tornado puisque j'avais déjà presque fini la modélisation du bras.
Il est constitué d'une structure imprimable (mis à part les tubes de pvc 40 mm diamètre extérieur) et tout le reste sont des pièces de robotiques tel que 4 nema 17 dont 3 équipés de réducteur planétaire, 2 nema 23 100 mm couplé à un engrenage vis sans fin 40:1, des end-Stop, capteur effet hall, etc..
Tous ça va être piloté par une arduino due (en espérant que le micro contrôleur sera assez rapide pour pouvoir utiliser les moteur P à P au moins à 1/8 de pas). J'aimerai aussi diriger le bras en fonction de coordonnées cartésiennes (XYZ) et de l’orientation sur ces 3 mêmes axes. Bon pour la position j'ai réussi les calculs, mais pour l'orientation là je galère. Dois-je utiliser les angles d'Euler ? Peut - être que je suis à coté de la plaque et qu'il y a un moyen plus simple. Existe-t-il un logiciel capable de simuler les trajectoires et de communiquer à l'arduino la valeur les angles de chaque articulation ? Après des recherches, je suis tombé sur ROS, apparemment il en ai capable. Mais j'aimerai tout de même que l'aduino reste indépendant (il aura tout de même une communication bluetooth avec un hc06 vers android pour transmettre les coordonnés, vitesse et accélération imposées).
Si quelqu'un s'y connait merci de m’éclairer dans les choix de ce projet, ça me donnerai un grand coup de pouce !
Voici un aperçu de la modélisation et une photo des impressions déjà réalisées.