Bonjour,
J'essaie de construire une machine en rotation (fig. en attaché) à une vitesse assez importante, 1500 tours/min et j'aurais besoin de quelques conseils.
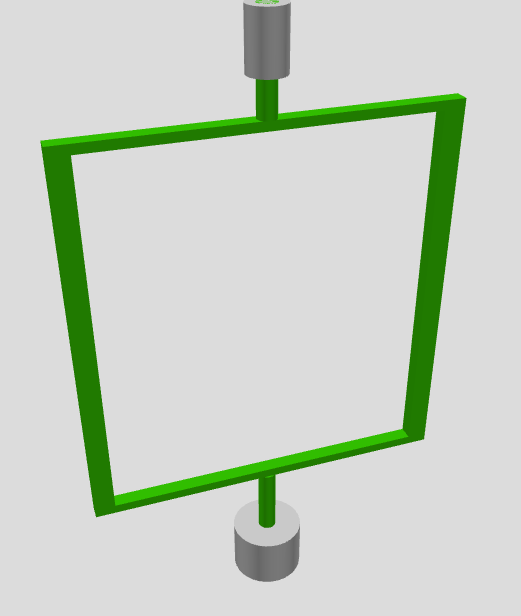
La structure de base de la machine est un chassis carré de 40cm de côté (en vert dans la figure) que j’aimerai mettre en rotation autour d’un axe vertical. Dans l'image, les parties en gris sont fixes et un des deux cylindres en vert devrait être fixé à l'arbre du moteur.
Le pois du chassis devrait être autour de 200gr car il contient des LEDs activées par un micro-controlleur.
Le moteur devrait avoir sa vitesse contrôlé par un autre micro-controlleur qui nécessite un signal de retour du moteur à chaque tour.
Une première question: quel type de moteur pourriez-vous me conseiller pour ce type d’application?
J’ai bien sur d’autres questions, mais je prefère proceder par étapes pour ne pas compliquer les échanges.
Merci d’avance pour vos réponses,
Marci