

Bonjour,
Je vous présente le robot quadrupède Borvo ayant participé à la Toulouse Robot Race 2019.

Voici les caractéristiques techniques du robot :
- Servomoteurs JX PDI-6221MG 20KG * 8
- Microcontrôleur : teensys 3.5 - 32 bit 120 MHz ARM Cortex-M4 (compatible avec Arduino)
- Capteurs de distance : VL53L0X * 2 + LIDAR TFmini-Plus * 1
- IMU : CMPS12 (non utilisé à Toulouse)
- Batterie : LiPo 2S - 7.4V
- Mécanique : bois peuplier 3 mm (découpé au laser) + équerre alu
- Switch On/Off
- Switch start
- Bouton arrêt urgence
- Dimensions mécaniques : 400 x 170 x 180 mm
Les deux capteurs VL53L0X permettent de recaler le robot avec les bordures de la piste.
Le capteur Lidar TFmini-Plus permet de détecter le portique de fin de la course.
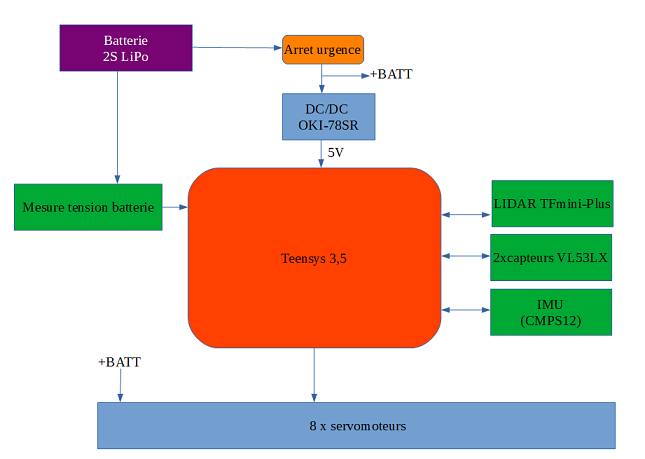
Synoptique de la carte électronique:
Le robot Doggo m'a inspiré pour la réalisation de ce robot quadrupède.

















