
Il fait 30cm de long (de coté sur la photo), 27 de large et 20 de haut (29 avec la tourelle).
J'aurai pas pu l'imprimer d'une piece ^^.

Pilier du forum


Posté 14 novembre 2016 - 07:46
Ma chaine YouTube : https://www.youtube..../oracid1/videos
Staff Robot Maker

Posté 14 novembre 2016 - 09:26
Il fait 30cm de long (de coté sur la photo), 27 de large et 20 de haut (29 avec la tourelle).
J'aurai pas pu l'imprimer d'une piece ^^.
Moi j'aurais pu ! 
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre occasionnel

Posté 15 novembre 2016 - 09:21
Le support servo et la 'tourelle' c'est de l'impression 3D ?
Et les deux plateaux transparents au milieu et en haut du robot, quel materiel tu utilises et comment tu le travailles ?
Staff Robot Maker
Posté 15 novembre 2016 - 02:20
j'ai la même machine =) simple et efficace =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre occasionnel
Posté 15 novembre 2016 - 02:20
Ah cool , faut que je me fasse un setup similaire pour creer tous ces elements de support non structurel.
La perceuse avec support, plus des plaques de bois ou plexi me parait un bon setup simple efficace, pas cher et pas trop encombrant.
Made By Humans
Posté 15 novembre 2016 - 04:09

Membre passionné

Posté 15 novembre 2016 - 06:15
Je rejoins entièrement Path sur le fait qu'utiliser une bonne petite perceuse à colonne plutôt que de se lancer directement dans la conception de pièces en 3d permet bien souvent de gagner du temps.....
Avec la conception de mon robot je me rends compte à quel point nous abandonnons les bases de la conception, parce que nous avons à disposition une imprimante 3D......
Au final, je passe plus de temps sur mon logiciel de DAO et sur mon imprimante que de réaliser des pièces basiques qui pourraient très bien convenir.....
Rien de tel qu'une petite plaque d'alu ou de plexi, quelques trous, filetages et hop !!!
Made By Humans
Posté 20 novembre 2016 - 06:08
Si la montagne ne va pas à toi, va à la montagne. Puisqu'on peut pas avoir un servo sur 180°, je vais l'utiliser sur 90° et mettre 4 VL53L0X 
Je mettrai un arduino dans la tourelle pour piloter tout ça. Ça limitera la quantité de fils entrainés dans la rotation.
Dans le chassis, un autre arduino servira à piloter les 2 moteurs CC et compter les interruptions des roues codeuses.
Le raspberry devra piloter 2 arduinos via usb. Je sais que cela fonctionne bien pour un arduino. Pour 2 je sais pas. Je vais check ça rapidement. Sinon, je vais devoir adapter les 3.3V du raspberry pour faire du SPI. Pas envie 
Membre occasionnel
Posté 21 novembre 2016 - 07:50
Tu peux aussi utiliser le protocol I2C.
Si le raspberry est en maitre et les arduino en esclave il n'y a pas besoin de convertisseur logique.
Voici ce que j'ai trouvé sur le sujet :
https://oscarliang.c...-connected-i2c/
Staff Robot Maker
Posté 21 novembre 2016 - 08:46
Le raspberry devra piloter 2 arduinos via usb. Je sais que cela fonctionne bien pour un arduino. Pour 2 je sais pas.
Si rassure toi ça marche bien 
Par contre il faut que tu mette en place un petit message pour être sûr de " qui est qui " =)
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Made By Humans
Posté 04 décembre 2016 - 07:09
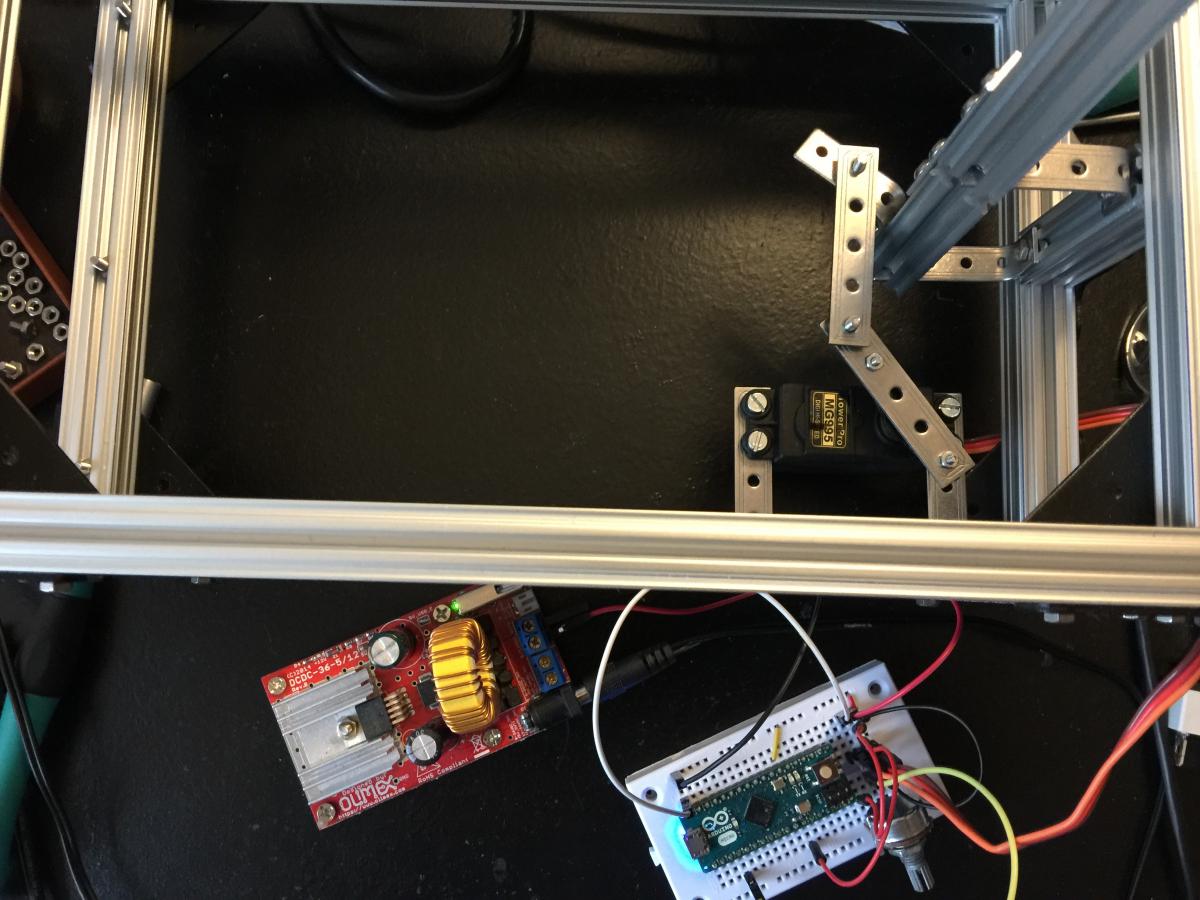
Voilà quelques nouvelles d'Hector.
J'ai déporté le poids de la tourelle de l'axe du servo avec cette mécanique. Quelqu'un sait si cela porte un nom ?
Et la tronche de la tête de la tourelle :
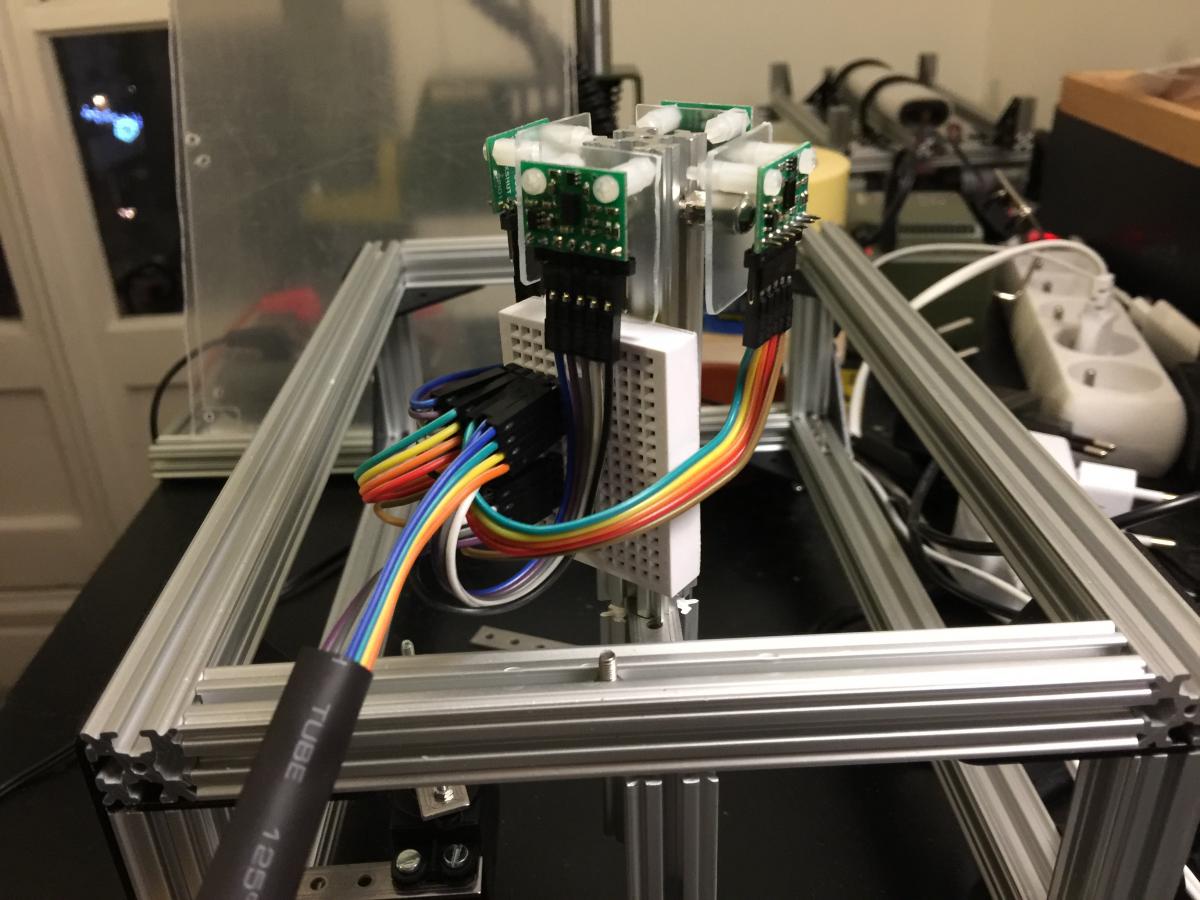
Prochaine étape, je dois pouvoir mesurer les distances dans les 4 directions et en rotation. J'espère que je pourrai avoir assez d'échantillons sur le secteur de 90° pour que soit utilisable.
Staff Robot Maker
Posté 04 décembre 2016 - 07:33
Par curiosité, pourquoi avoir déporté le mécanisme de rotation et ne pas avoir directement mit le servomoteur sous les capteurs ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Made By Humans
Posté 04 décembre 2016 - 07:56
Plusieurs choses. Cette forme plus verticale que la première oppose moins d'inertie. Le premier montage avec 2 lidar était très large. On sentait bien l'inertie du plateau sur le moteur. Même sur celui que j'ai trouvé ici. Je n'ai pas continué dans cette direction quand j'ai ajouté les 2 derniers. Après, je n'ai pas trouvé de moyen simple pour fixer le profilé verticalement sur l'axe su servo. Une fois déporté, je me suis lâché sur le poids .
Aussi, je pensais pouvoir démultiplier la course du servo : avoir une course plus grande que 90° sur le servo pour faire une course de 90° sur la tourelle. C'est l'inverse que j'obtiens ... Je suis pas doué en mécanique.
Staff Robot Maker
Posté 04 décembre 2016 - 09:43
Plusieurs choses. Cette forme plus verticale que la première oppose moins d'inertie. Le premier montage avec 2 lidar était très large. On sentait bien l'inertie du plateau sur le moteur. Même sur celui que j'ai trouvé ici. Je n'ai pas continué dans cette direction quand j'ai ajouté les 2 derniers. Après, je n'ai pas trouvé de moyen simple pour fixer le profilé verticalement sur l'axe su servo. Une fois déporté, je me suis lâché sur le poids
Aussi, je pensais pouvoir démultiplier la course du servo : avoir une course plus grande que 90° sur le servo pour faire une course de 90° sur la tourelle. C'est l'inverse que j'obtiens ... Je suis pas doué en mécanique.
Je comprend l'intérêt d'essaye de démultiplier, le but est ainsi d'essayer d'avoir une meilleur précision mais vu que là c'était pas le cas je me posais la question ^^
Pour démultiplier la course du servo comme tu le souhaite la distance des points de pivot du bras lié à l'axe de rotation de ton servo doit être plus petite que la distance entre les points de pivot du bras lié à l'axe à tourner.
Un outil gratuit que j'utilise tout le temps pour ce genre de chose c'est géogébra : Je t'ais fais un petit croquis où tu peux faire bouger un point pour voir comment se déplace les axes =)
https://www.geogebra.org/m/CVxnZsb3
Après moi j'aurais quand même essayer de tout fixer directement sur la tête du servo sans même passer par le profilé alu ... ( et donc monté le servo tout en haut ^^ )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
Membre chevronné

Posté 05 décembre 2016 - 04:39









0 members, 1 guests, 0 anonymous users





