Bonjour,
Je cherche des conseils pour un petit problème de robotique, et je m'adresse à vous à la recherche de pistes de prospection.
Si vous aviez des idées, ou des liens sur le sujet, je suis intéressé.
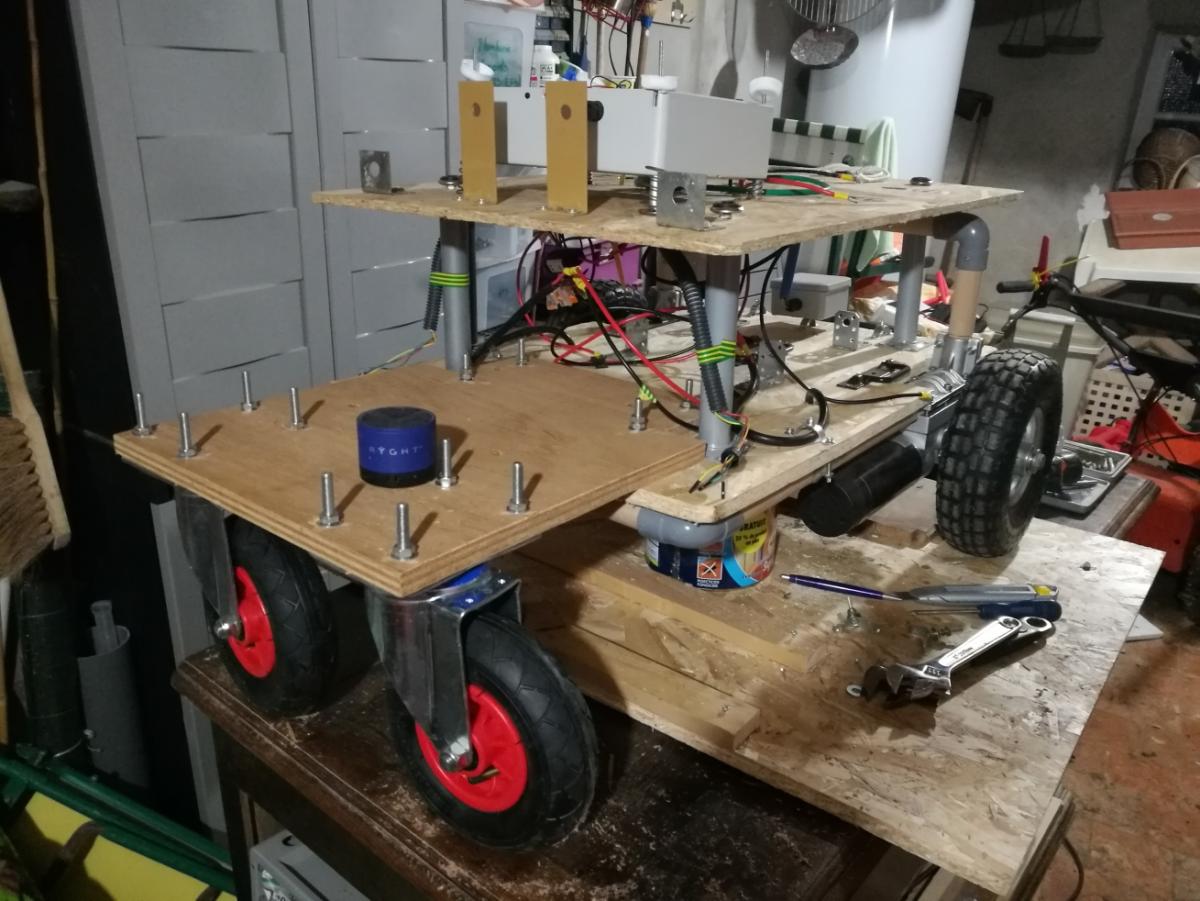
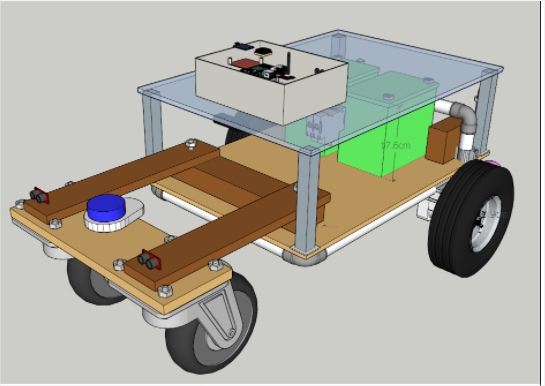
Il s'agit d'un robot motorisé d'extérieur (2 roues motorisées et deux roues libres) .
Le robot peut piloter ses 2 roues indépendamment, de 0 à 100% de la vitesse des moteurs (moteur de 300W, vitesse max 6 km/h, diamètre des roues de 26 cm).
Les commandes de bases sont :
- avancer à X % de la vitesse max. en ligne droite
- reculer à -X% de vitesse max. en ligne droite
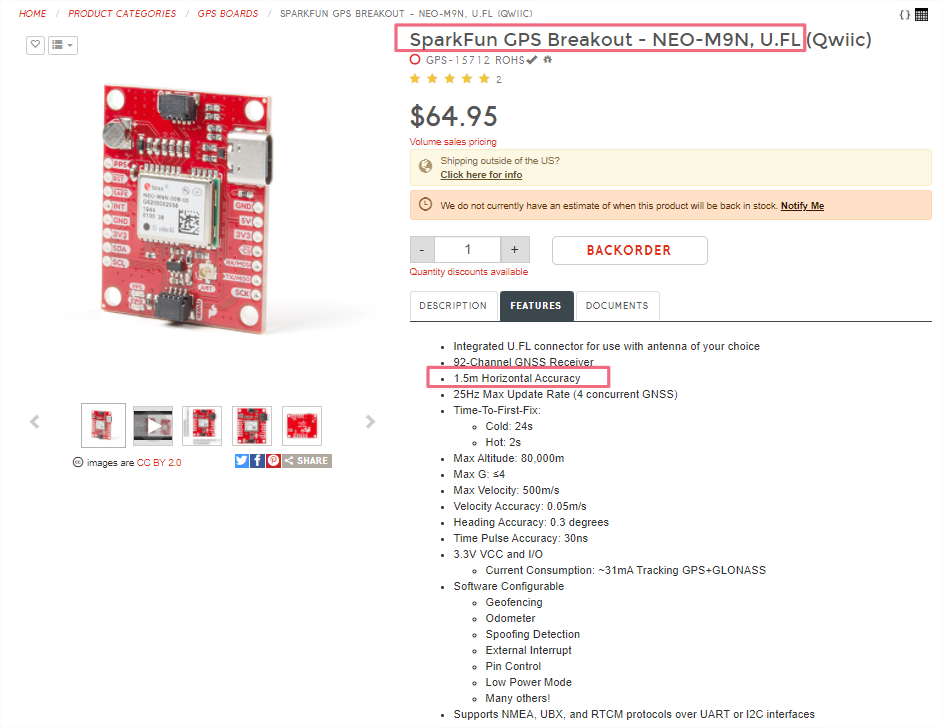
- tourner sur soi-même vers un cap fixé (le robot est équipé d'un GPS et d'un magnétomètre pour mesurer le cap). [0..359]
- lorsque le robot se déplace, on teste s'il est, sur une prochaine itération de mouvement, hors du polygone. S'il risque de sortir, on arrête le robot.
Le robot a une largeur (par exemple 0.7m) , correspondant à sa zone de travail.
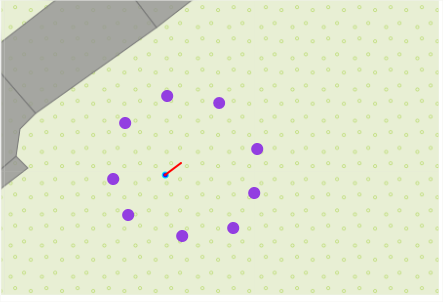
Le robot doit évoluer dans un polygone (dont les sommets sont définis par des points en coordonnées GPS { lat, lng }. Le polygone est relativement simple, on évite les angles aigus entrant.
Par opération simple, on peut convertir { lat, lng}, en coordonnées UTM, qui s'apparentent plus à des coordonnées { x, y } dans un repère orthonormé.
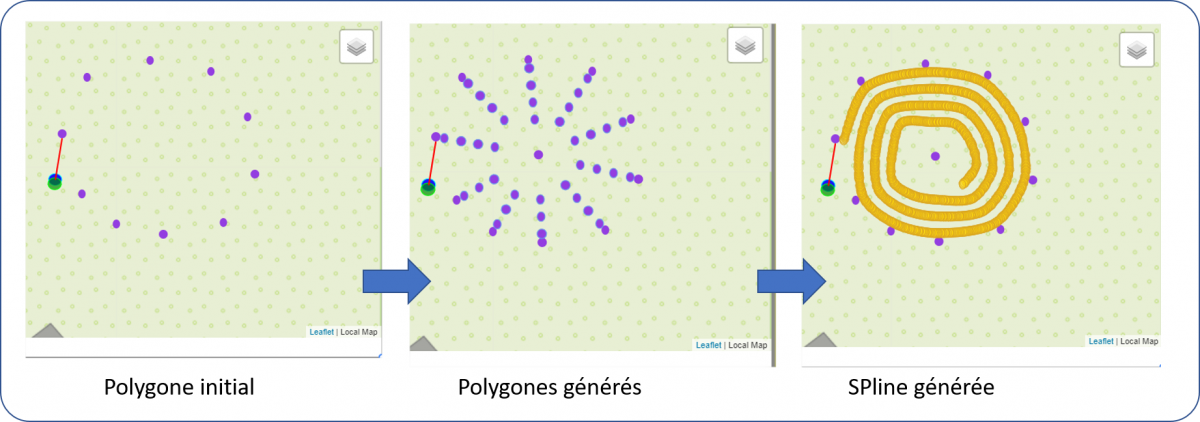
Le but est de parcourir toutes la surface du polygone, de manière optimale (vitesse, durée).
Actuellement, j'utilise un enchainement simpliste, où le robot avance en ligne droite, détecte sa sortie du polygone, recule à vitesse lente pendant 5 secondes, tourne aléatoirement à droite ou à gauche, avance en ligne droite, etc... mais les performances sont très faibles.
Le pilotage est réalisé depuis une Raspberry Pi 4 en NodeJs.
Cordialement.


 tu découpes dès le départ le polygone en 2 (ou plus) polygones convexes, que tu traites succéssivement
tu découpes dès le départ le polygone en 2 (ou plus) polygones convexes, que tu traites succéssivement