Bonjour,
A quelques heures des épreuves de la Tiny-TRR, voici la présentation de mon robot roulant.

La base est un châssis Tamiya 1/10ème électrique de catégorie piste loisir modèle M-05, monté en empattement court. L'objectif était de pouvoir négocier au mieux les virages et les épingles du circuit de la Tiny TRR qui s'avère beaucoup plus technique que celui de la TRR classique.

Il est équipé de l'ensemble radiocommandé basique : servo de direction standard, contrôleur de vitesse (brushed) et moteur à charbons (540).
Pour l'épreuve des roulants, on a ajouté :
- 5x LIDAR Benewake TF Mini Plus
- un capteur à effet Hall (US5881LUA)
- un module ESP32 (wroom32)
- un bouton poussoir
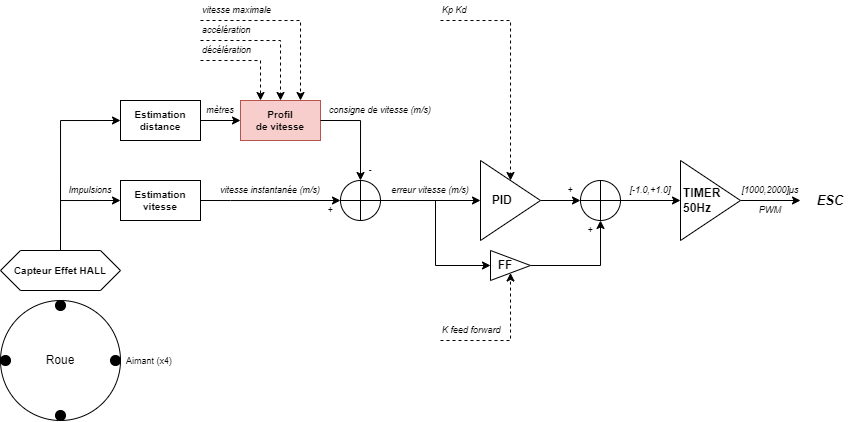
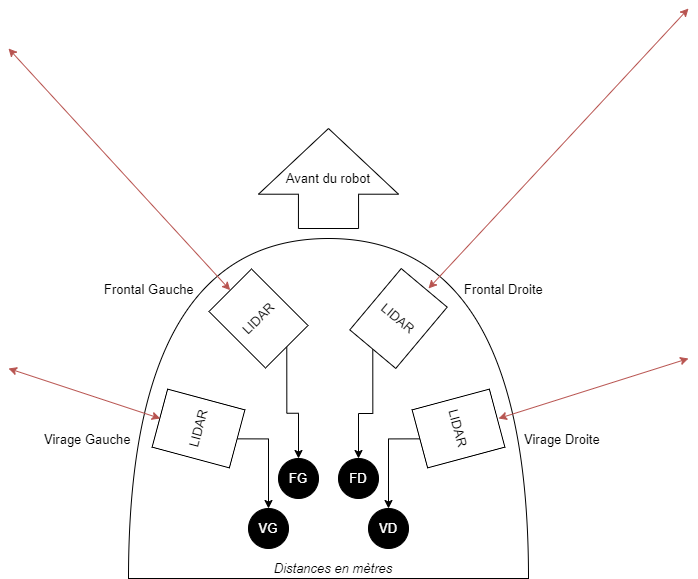
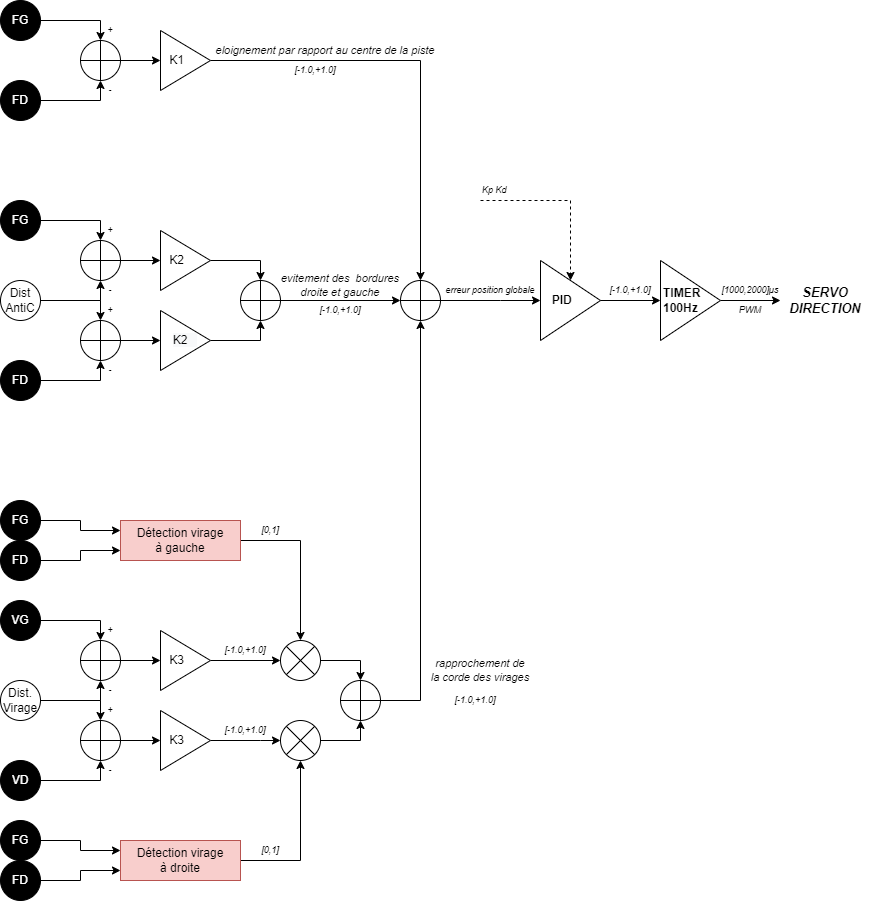
Quatre LIDAR sont utilisés pour estimer la position du robot par rapport aux glissières, un LIDAR pointé le haut détecte le passage sous le portique de la ligne d'arrivée et le capteur effet hall, couplé à des aimants collés dans la jante d'une roue arrière permet d'estimer la distance parcourue et la vitesse instantanée du robot. L'ESP32 est programmé en Arduino (automate de course, un PID en vitesse d'avance, et un PID en position par rapport aux glissières).
L'électronique est fixée sur un support imprimé en PLA, qui est lui même 'posé' sur la châssis en s'enfichant dans les plots de carrosserie. Les quatre LIDAR frontaux sont montés verticalement, bien que cela n'a aucun incidence sur les mesures de distance. Les deux premiers LIDAR sont orientés à 40° à droite et à gauche, les deux suivants à 75° droite/gauche.
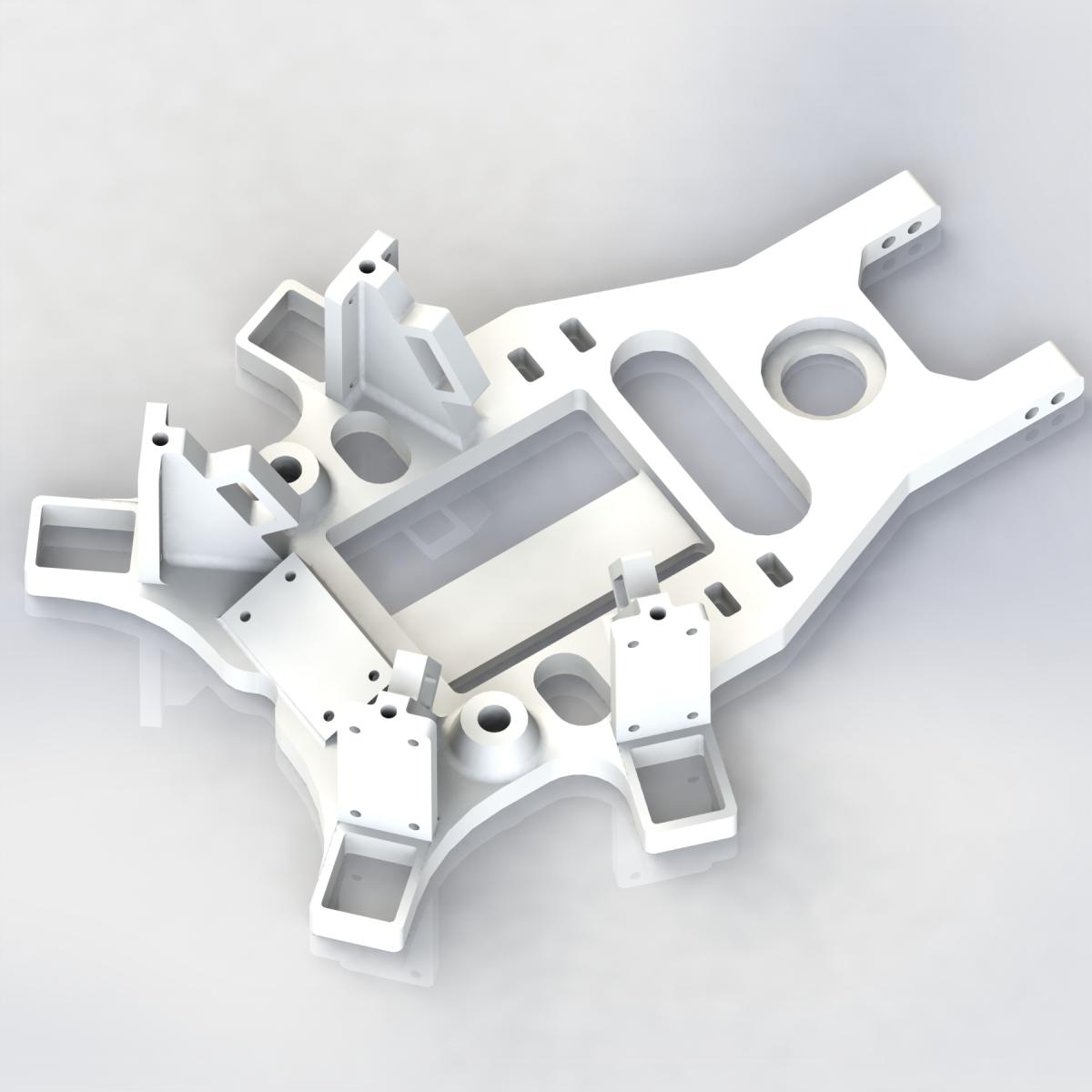
. SuppCarr2.STL 821,47 Ko
105 téléchargement(s)
SuppCarr2.STL 821,47 Ko
105 téléchargement(s)
¨Pour l'odométrie, quatre aimants (d5 mm x ep2.5mm) sont placés à l'intérieur de la jante d'une roue arrière, collés à la cyano dans un support PLA, lui même collé à la cyno à la jante en plastique.

SupportAimant4.STL 395,3 Ko
104 téléchargement(s)
Pendant les essais libres, la principale difficulté a été le manque d'adhérence des pneus (slic) fournis avec le kit de base Tamiya. On a remplacé par des pneus à crampons.
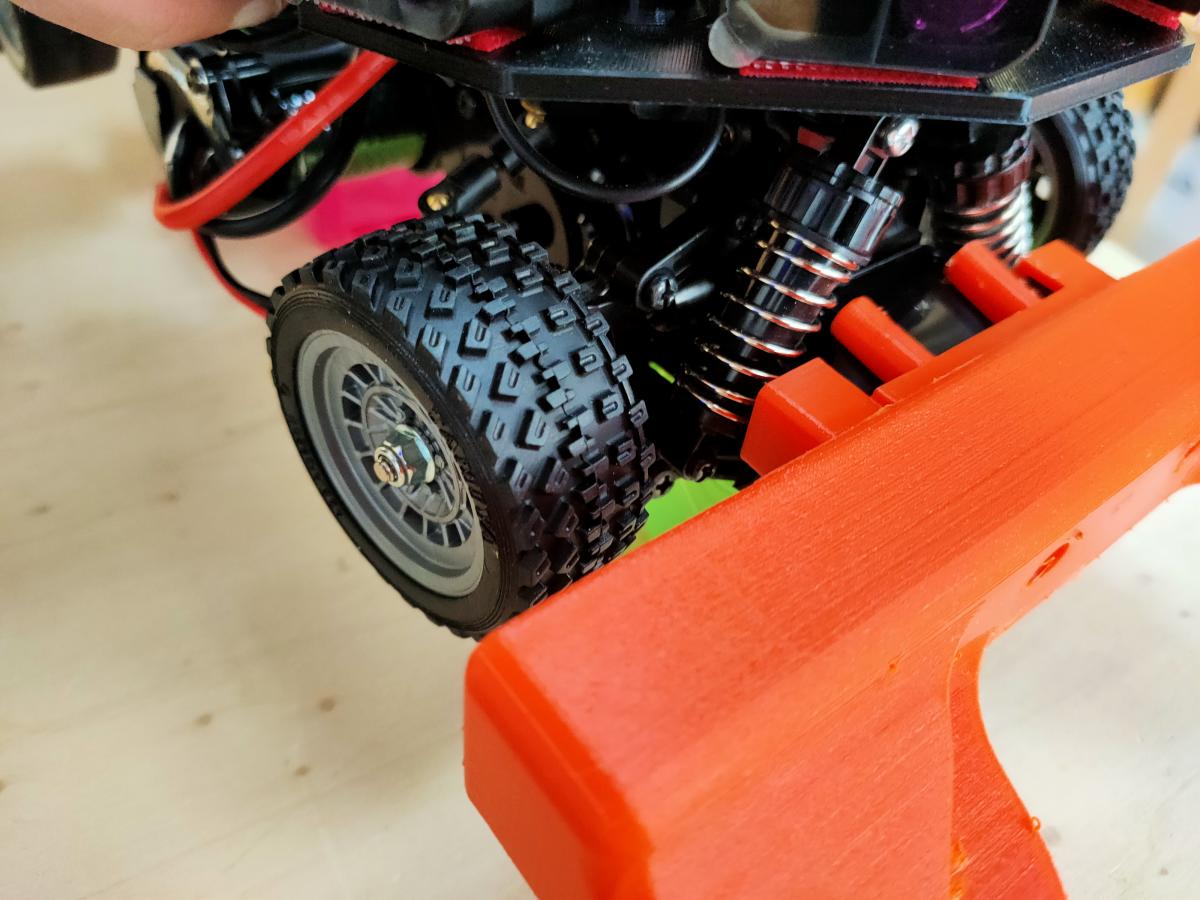
Ensuite, c'est une histoire d'algorithmes et de réglages !
Questions & Réponses :
Quel est le cout du robot ?
Le montant total est d'environ 500€ pour un robot complet.
130€ pour le kit voiture à monter avec moteur et variateur de vitesse inclus (NSU TT JAGERMEISTER M05 - 1/10E - TAMIYA - 58649)
50€ pour un servo de direction standard, le kit de roulements à billes et un accus 2S 4000mAh 7.2v
25€ pour une radiocommande 2.4GHz basique (Hobbyking GT2E AFHDS 2A 2.4ghz 2 Channel Radio System w/ Receiver)
250€ pour les cinq LIDAR
25€ pour le module ESP32 Dev Kit C V4 NodeMCU WLAN/WiFi (commandé en quantité 3)
15€ pour le PCB d'interconnexion fait maison (fabriqué en quantité 3)
+ fils, connecteurs, colle, scotch, petits aimants.
Quelle est la précision des LIDAR ?
Environ 1% (soit +/-1cm à 1m distance). Portée de 6 à 12m selon les conditions. Le niveau d'éclairage ambiant et le rayonnement solaire direct ne semblent pas affecter les mesures.
Nous avons constaté que le montage des LIDAR à la verticale ou à l'horizontale n'aucun effet sur les mesures de distance.
Bien que spécifiés pour une portée minimale de 10cm, on obtient des mesures de distance exploitables à très courte portée, entre 5 et 10cm.
(A suivre).