Bonjour,
tout d'abord, pour les moteurs, ça a l'air d'être ceux là : https://education.ma...-encoder-motor/ : tu confirmes? En tout cas, même avec ton lien moins détaillé, le moteur est donné pour 5V ou 7.4V : pas dit qu'il résiste longtemps à 11.1V (en particulier les encodeurs), encore moins à 12.6V (quand tes batteries sont chargées au max).
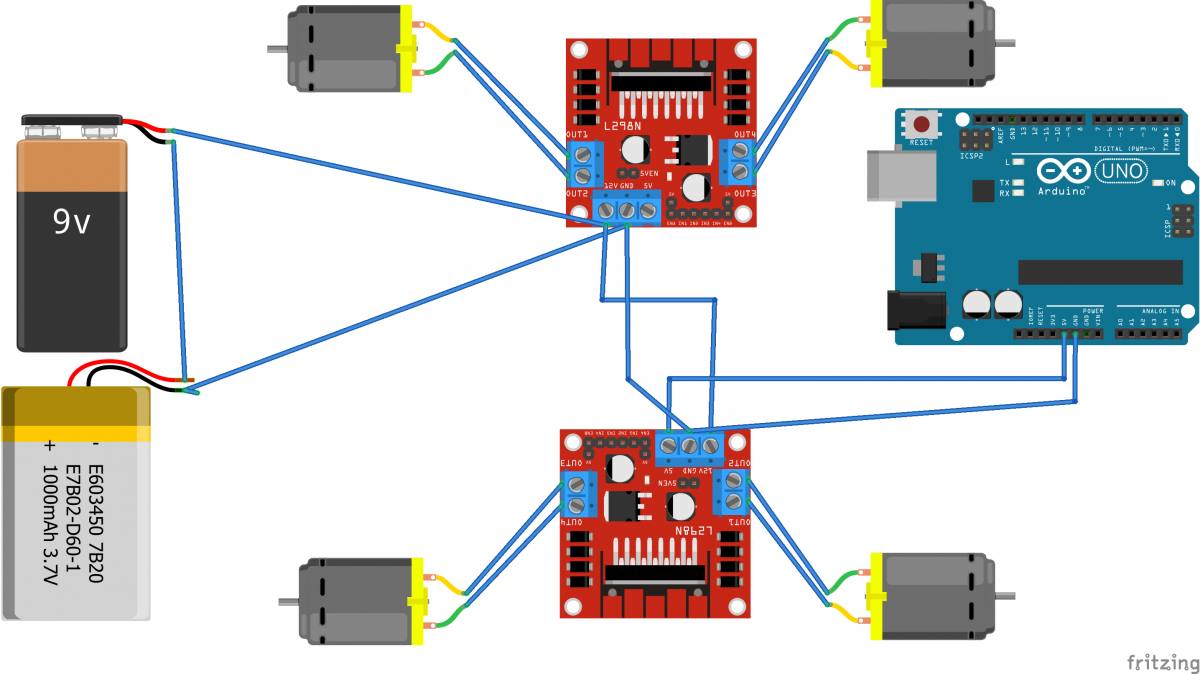
Pour tes batteries, je te déconseilles vivement de brancher deux batteries non identiques en série : l'une sera déchargée avant l'autre, ici la 3.7V qui a moins de capacité. Du coup, la tension totale restera positive, alors que la tension de la petite batterie descendra très bas, la tension totale suffisant à maintenir le courant. Si tu ne débranches pas à temps la petite batterie, tu atteindra vite des tensions critiques (<2.7V) qui endommageront ta batterie, voir risquent de la faire prendre feu/exploser, soit lors de la décharge, soit des charges suivantes.
Je te conseilles vivement de ne jamais mettre 2 batteries de types différents (ou même de vécu différent) en série, tout particulièrement s'il s'agit de batteries au Lithium : au mieux tu vas casser tes batterie à la moindre innatention, au pire tu vas mettre le feu à ta maison ou avoir une batterie qui t'explose entre les mains)
Pour vérifier si la batterie est assez puissante, tu peux brancher 0, puis 1, puis 2, puis 3, puis 4 moteurs en direct sur la batterie 7.4V, et vérifier s'ils tournent bien, et quelle est la tension de la batterie (si elle baisse fortement avec le nombre de moteurs, alors elle n'est pas capable de fournir assez de courant).
Ensuite, le choix des L298N comme controleur de moteurs est un très mauvais choix (je ne sais même pas pourquoi on les trouve encore de nos jours), surtout pour des moteurs très basse tension : en effet, on perd jusqu'à 4.9V de tension dans le L298N (cf https://www.st.com/r...asheet/l298.pdf, page 3, ligne VCEsat).
Je ne suis pas sur non plus que le convertisseur de ton module L298N te fournisse un 5V propre, en particulier lorsque la tension n'est que de 7.4V. Je te conseillerais plutôt d'alimenter l'arduino en 7.4V sur la pin Vin, et d'utiliser le régulateur interne de l'arduino.
Tu peux aussi vérifier si sur la sortie 5V tu as bien du 5V.
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.