


Système mécanique Suisse (équipe CRH, coupe 2013 Happy Birthday) utilisé pour la coupe de france de robotique et eurobot par une équipe suisse permettant de " stabiliser le robot " qui est en configuration à 2 roues motrices ( 2WD) pour éviter qu'il puisse avoir un petit mouvement de bascule " avant arrière " que beaucoup d'équipes " acceptent " ...
Un travail impressionnant des suisses :
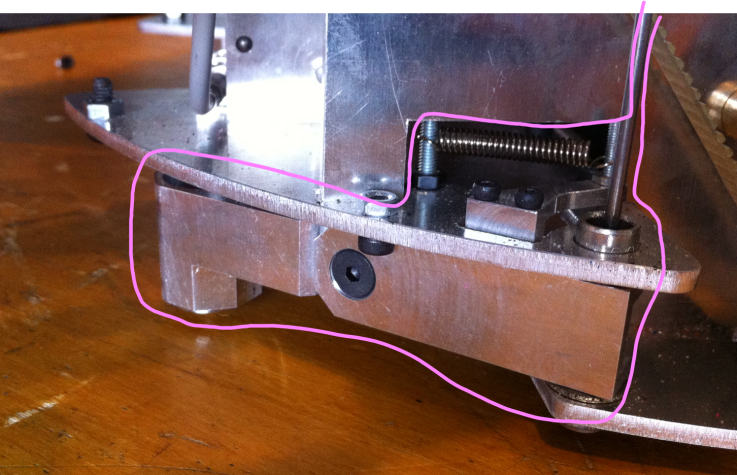
déjà au delà de la complexité apparente on notera l'appui sur bille folle arrière escamotable pour pouvoir reculer sur un rebord comme sur cette première photo

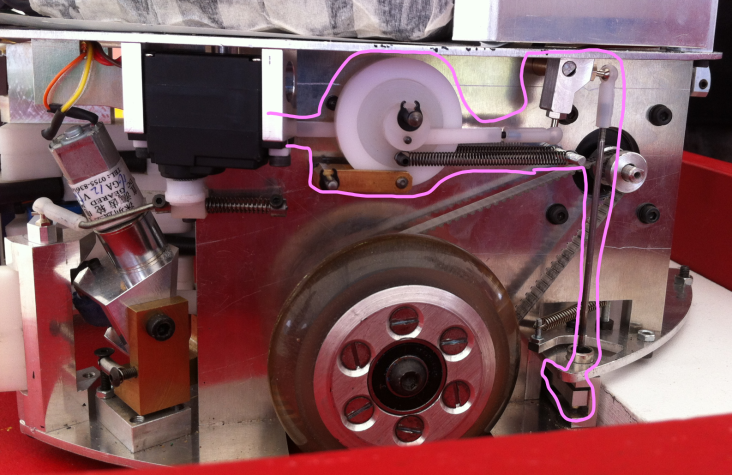
ce qui est entouré en rose, c'est dédié à la stabilisation du robot:
le mécanisme fait une mise en pression homogène des 3 billes folles du robot et ça va loin puisque ça équilibre aussi les billes folles du coup d'un point de vue cinématique résultante c'est comme si les billes folles étaient fixées à un même bati surplombé d'une rotule au centre, rotule poussé vers le sol (relativement aux roues de propulsion) par un ressort, et la subtilité c'est que la "rotule" se bloque automatiquement si les 3 billes sont en contact avec le sol pour justement éviter que le robot oscille lors des accel/decel.
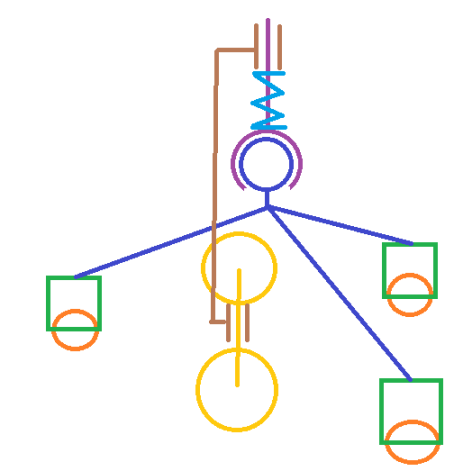
Schémas de représentation de ce mécanisme complexe :
vidéo :
équipe CRH, coupe 2013 Happy Birthday
Explications photos et vidéos: Crédit à Alf de l'équipe Goldorak










![[Mecapi] Projets scientifiques et plans de communication - dernier message par macerobotics](https://www.robot-maker.com/forum/uploads/profile/photo-thumb-9400.png?_r=1700632519)
![[Mars Attacks!] Coupe de france de robotique 2025 - dernier message par jung](https://secure.gravatar.com/avatar/d979299aa2cbc2bd9e79b674cf756175?s=100&d=https%3A%2F%2Fwww.robot-maker.com%2Fforum%2Fpublic%2Fstyle_images%2Fmaster%2Fprofile%2Fdefault_large.png)





