

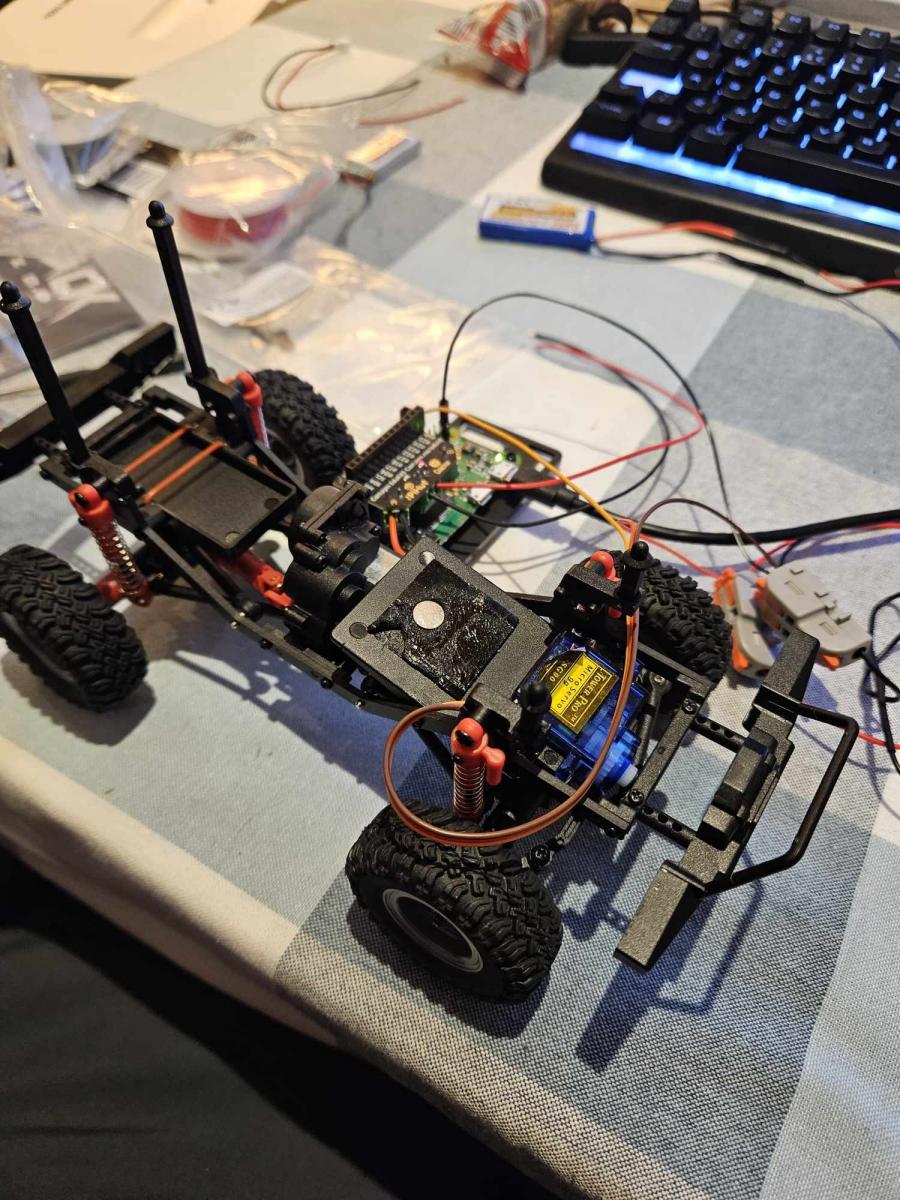
This is my (nearly completed) robot based on the FTX Outback Mini 2.0 RC rock crawler https://ftx-rc.com/f...o-run-dark-blue.
I am based in the UK where this is widely available, I paid about £65 GBP for the car itself + the following:
Raspberry Pi Zero 2 W.
On-board charger/UPS - Adafruit PowerBoost 500C https://www.adafruit.com/product/1944
Motor Driver - DRV8833 chip from TI (https://www.ti.com/l...ink/drv8833.pdf) on the CamJam Edukit Motor Controller HAT https://thepihut.com...otor-controller
LED Headlights and tail lights, came with the Outback Mini pre-wired with resistors, connected directly to Raspi GPIO.
Wide angle lens raspi camera.
Overlander 1000mah Lipo battery, but since the Adafruit 500C can charge Lipo/Li-Ion, could easily swap to a Li-Ion pack or single 18650 cell.
Buzzer, USB microphone
The reason I chose this is because it's a rock crawler, the motor is geared for high torque and low speed = great controllability indoors. Also very capable suspension and is able to go over quite rough terrain, meaning carpets and household obstacles are no problem. It's 1:24 scale, so a great size for indoors. The 4wd system has very high detent torque so it will not roll, and both axles are fully locked (not great for smooth turns but great traction).
I removed the RC esc/receiver system, and I had to swap the steering servo as it came with a 'dumb' 5-wire servo. I put in the 3-wire TowerPro SG92R micro which fit right in.
Still need to tidy up the wiring of course.
To some people it might not be as fun as building the whole robot from scratch, but it is fairly cheap and does result in a much more flexible and capable chassis for rough terrain. And of course spare parts are available.
Image(s) jointe(s)


Fichier(s) joint(s)
-
 358768495_6243742695721141_8692388551986918930_n.mp4 1,88 Mo
82 téléchargement(s)
358768495_6243742695721141_8692388551986918930_n.mp4 1,88 Mo
82 téléchargement(s)
-
359556351_6337515433011662_6449730304019105387_n.mp4 1014,44 Ko
81 téléchargement(s)
-
Untitled video.mp4 26,86 Mo
85 téléchargement(s)
















