Bonsoir,
Enfin des news ! 
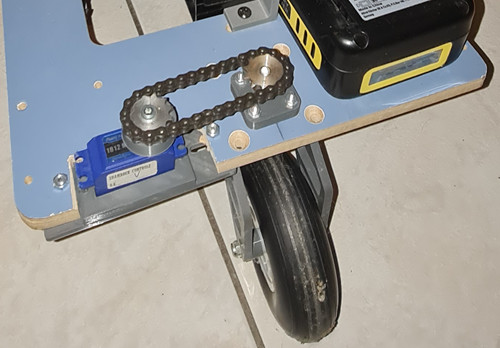
Vous vous rappelez, j'avais prévu d'utiliser des roues en 260x85, dont le pneu ressemble à ça :

j'avais modélisé un nouveau moyeux... mais j'avais complètement oublié la valve 
d'origine elle est tordue, et après avoir tourné la modélisation dans tous les sens, je ne savais pas quoi en faire :

heureusement ! pour 20€ j'ai trouvé 4 chambres à air avec des valves droites 

Donc j'ai pu réaliser les nouveaux moyeux, avec juste un perçage qui passe à travers l'axe central pour aller récupérer la valve de l'autre coté


les deux parties assemblées ça donne ça :

et voici la roue montée, coté moteur avec des créneaux pour peut-être utiliser un capteur inductif pour la vitesse de rotation

et coté extérieur, avec le perçage pour la valve

j'ai donc du réaliser un adaptateur pour aller chercher la valve de l'autre coté de la roue


la partie supérieure de la roue est en acier, et recevra deux roulements coniques (type Timken) avec réglage du jeu par écrou SKF et sa rondelle crantée
(je n'ai pas encore pu acheter les blocs d'acier pour loger les roulements, j'attends un peu car le transport me coûterait plus cher que la matière)

les deux flasques en aluminium.
À gauche celle du coté extérieur qui est plus étroite pour laisser la place à la rallonge du gonfleur,
et à droite celle coté moteur avec les 4 fixations du moteur (petits cylindre en acier)

coté intérieur avec les roulements à billes

Et enfin le montage de tous les éléments de la roue :




et finalement la roue complète :

Il faudra que je les pèse, mais clairement elles font leur poids (je suis assez serin chaque roue peu porter 150kg)
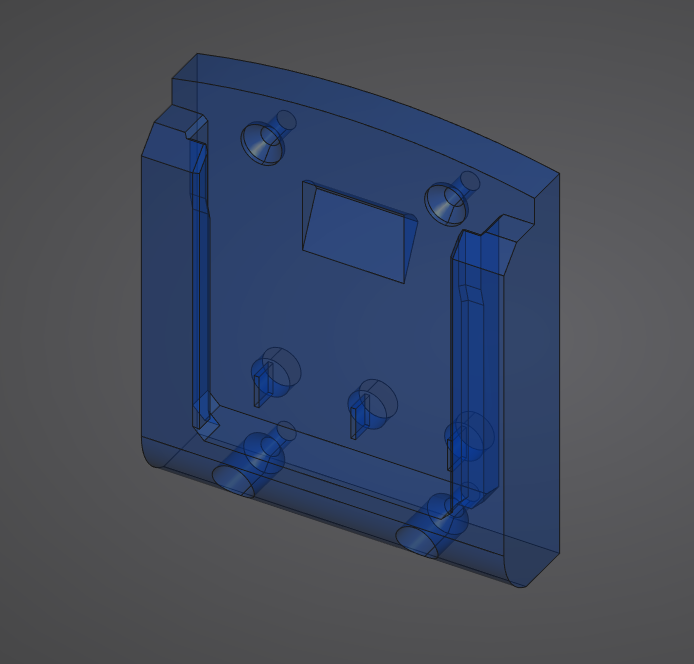
Je vais devoir également fabriquer la fixation pour la direction qui devrait aller sur la platine coté moteur,
mais pour l'instant je suis encore à chercher quel type d'actionneur je vais utiliser.
soit des vérins électriques avec 100mm de course
soit des motoréducteurs avec une bielle
Je partirais bien sur des vérins, mais ceux que j'ai trouvé au meilleur pris sont sur le site verinelectrique.fr , et je ne suis pas rassuré, entre la douane et les délais de livraison
si certains ont déjà commandé chez eux, je voudrais bien un retour 
Voilà, c'est tout pour aujourd'hui ^^
à plus













 )
)