Bonjour à tous,
Petite présentation de l’équipe de robotique Les Opossums.
L’équipe s’est créée il y a maintenant presque un an, avec pour objectif d’engager un robot à la prochaine édition de la Coupe de France de Robotique, qui aura lieu fin mai 2025. D’abord composée de deux membres ayant déjà participé à plusieurs éditions de la Coupe dans d’autres structures, l’équipe s’est peu à peu étoffée pour finalement compter cinq membres à l’aube de la compétition.
Depuis sa création, l’objectif de l’équipe est assez simple : concevoir un robot qui permette à chacun de s’amuser sans aucune limite (mis à part celles décrites par le règlement). Nous voulions donc un robot capable d’aller vite, de se déplacer de manière élégante et doté d’une électronique originale par rapport à ce qu’on a l’habitude de voir à la Coupe de France.
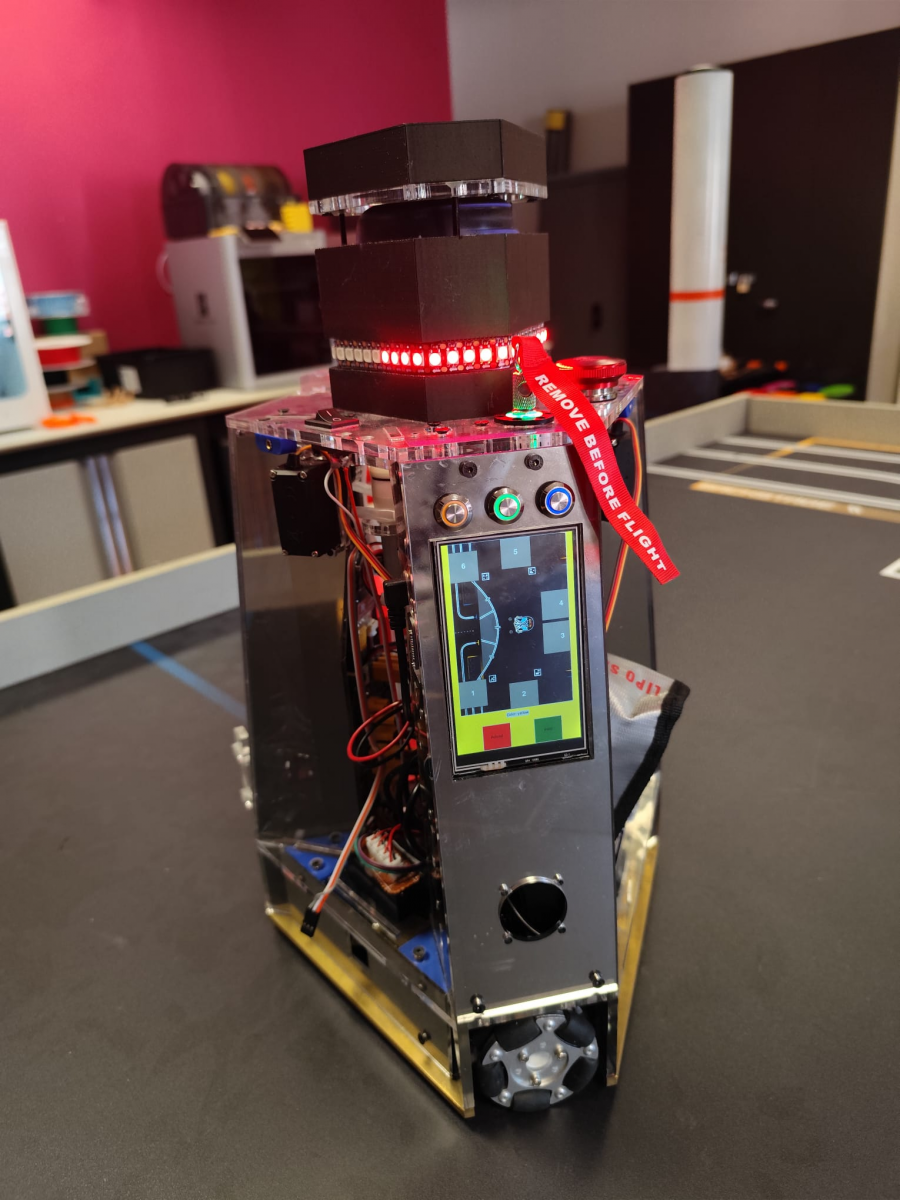
Voici une petite présentation des caractéristiques du robot :
Nous avons fait le choix de partir sur un robot holonome à trois roues, équipé de moteurs M2006 P36, qui sont parfaits pour un robot de la Coupe de France. Ils sont compacts, puissants et très simples à utiliser. La communication se fait à l’aide d’un bus CAN, et ils renvoient à 1 kHz leur vitesse, couple et position, ce qui facilite grandement l’intégration mécanique (pas besoin de rajouter des codeurs externes). Ils nous permettent d’atteindre des vitesses plutôt correctes, puisque nous sommes parvenus à aller à 1,5 m/s sur une table de jeu, tout en conservant une assez bonne précision de déplacement.
La localisation se fait via un LiDAR A2M12 placé dans le mât du robot. Nous utilisons des balises externes au plateau de jeu afin de trianguler la position du robot. Cela nous permet, lors de fortes accélérations ou décélérations, de compenser la dérive odométrique.
Le robot possède deux cartes électroniques qui lui servent de cerveau.
- La première, la plus classique, est un Raspberry Pi 4 (8 GB), qui tourne sous ROS 2 et qui gère l’IHM, nos scripts de match et la triangulation du robot.
- La seconde, un peu moins classique, est architecturée autour d’un Zynq-7020. Pour ceux qui ne connaissent pas, c’est un SoC (System on Chip) de chez Xilinx, qui possède une matrice FPGA (utilisée pour gérer l’ensemble de nos actionneurs) et deux cœurs ARM Cortex-A9 (qui, pour le moment, ne gèrent que l’asservissement du robot et une partie du traitement d’un LiDAR YDLidar GS2 – si nous arrivons à finaliser le traitement avant la Coupe).
Notre robot est donc multi-langage : il mêle C, C++ et Python pour la partie logicielle, ainsi que du VHDL pour la partie matérielle.
Côté logiciels utilisés :
-
La mécanique est conçue sous SolidWorks,
-
L’électronique a été développée avec KiCad,
-
La suite Vitis/Vivado a été utilisée pour le Zynq.
Enfin, l’objectif pour nous cette année (en plus de s’amuser, bien évidemment) est de tester au maximum nos choix technologiques afin de valider notre architecture pour aller plus loin l’année prochaine.