


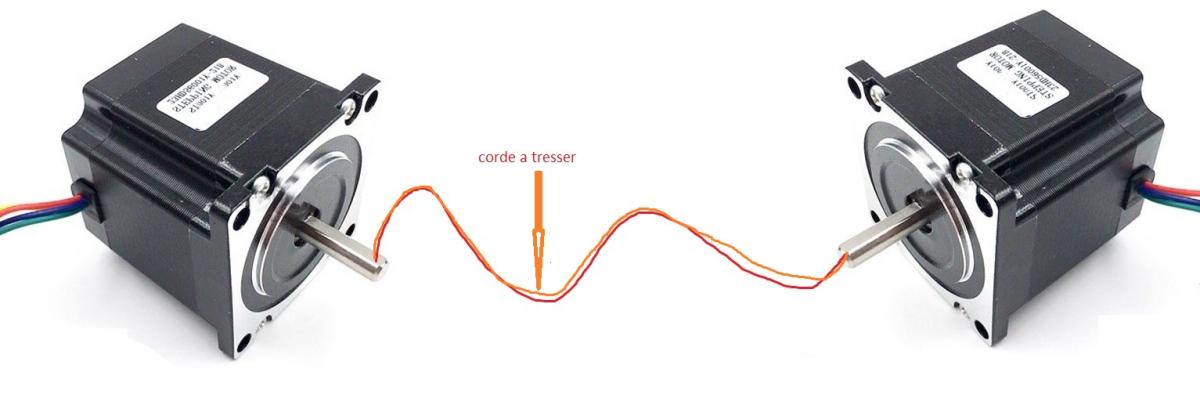
Bonjour à tous , en quelques lignes je vais vous présenter mon projet . Le but étant de tresser la corde placé entre les 2 moteurs . Pour cela, je vais avoir besoin de réaliser des mouvements précis sur mes moteurs . Je vais compléter mon code avec des boutons , un écran LCD et un potentiomètre .
Voici l'explication pour le code que je cherche à réaliser pour faire fonctionner 2 moteurs pas à pas, face à face .
Ce qui est important c'est d'utiliser la librairie Accel stepper pour un démarrage progressif .
* Dans n'importe quel cas d'utilisation des moteurs il me faut faire varier la vitesse à l'aide d'un potentiomètre de toute les vitesses moteur ,(qu'un seul potentiomètre) .
* Rajouter un bouton arrêt , pour stopper le programme (bouton unique si possible ) .
1) LA MARCHE AVANT
a) Sur un écran LCD ( ligne 2 ), régler le nombre de tour de la bobine à effectuer par le bouton réglage bobine (100,200 jusqu'à 1000 )puis retour à 100 en boucle .
 J'appuis sur le bouton marche avant de la bobine , les 2 moteurs tournent en même temps mais en sens contraire .
J'appuis sur le bouton marche avant de la bobine , les 2 moteurs tournent en même temps mais en sens contraire . 2) LA MARCHE ARRIERE
c) Sur un écran LCD ( ligne 2 ) régler le nombre de tour de la bobine à effectuer (100,200 jusqu'à 1000 )puis retour à 100 en boucle .
d) J'appuis sur le bouton marche arrière de la bobine , les 2 moteurs tournent en même temps mais en sens contraire . Mais dans la direction opposé de la marche avant.
3) TORSADE HORAIRE
e) Sur un écran LCD ( ligne 1 ) régler le nombre de tour de la torsade à effectuer par un bouton réglage torsade (de 1 à 20 ) puis retour à 1 en boucle .
f) J'appuis sur le bouton torsade horaire , les 2 moteurs tournent en même temps dans le même sens .
4) TORSADE ANTI HORAIRE
g) Sur un écran LCD ( ligne 1 ) régler le nombre de tour de la torsade à effectuer (de 1 à 20 ) puis retour à 1 en boucle .
h) J'appuis sur le bouton torsade anti horaire , les 2 moteurs tournent en même temps dans le même sens . Mais dans la direction opposé du sens horaire.
J'ai déjà effectué un code avec vous . C'est pas si simple et cela fait quelques temps . Toute aide sera apprécié . Je vais rajouter quelques lignes de variables pour le code .
En vous remerciant
cook



 le long est bien sur 32 bits comme prévu mais il y a peut être un simple problème de cast là où tu l'as identifié ...
le long est bien sur 32 bits comme prévu mais il y a peut être un simple problème de cast là où tu l'as identifié ... 











