


Sparkfun propose des produits en apparence sympa pour l'amateur. L'entreprise fait assez jeune, assez fun, vivante. Jusqu'ici, tout va bien.
Mais voilà mes 2 problèmes, qui ne sont pas pardonnables. Sparkfun propose des produits dont la conception n'est apparemment pas testée. Je suis très déçu.
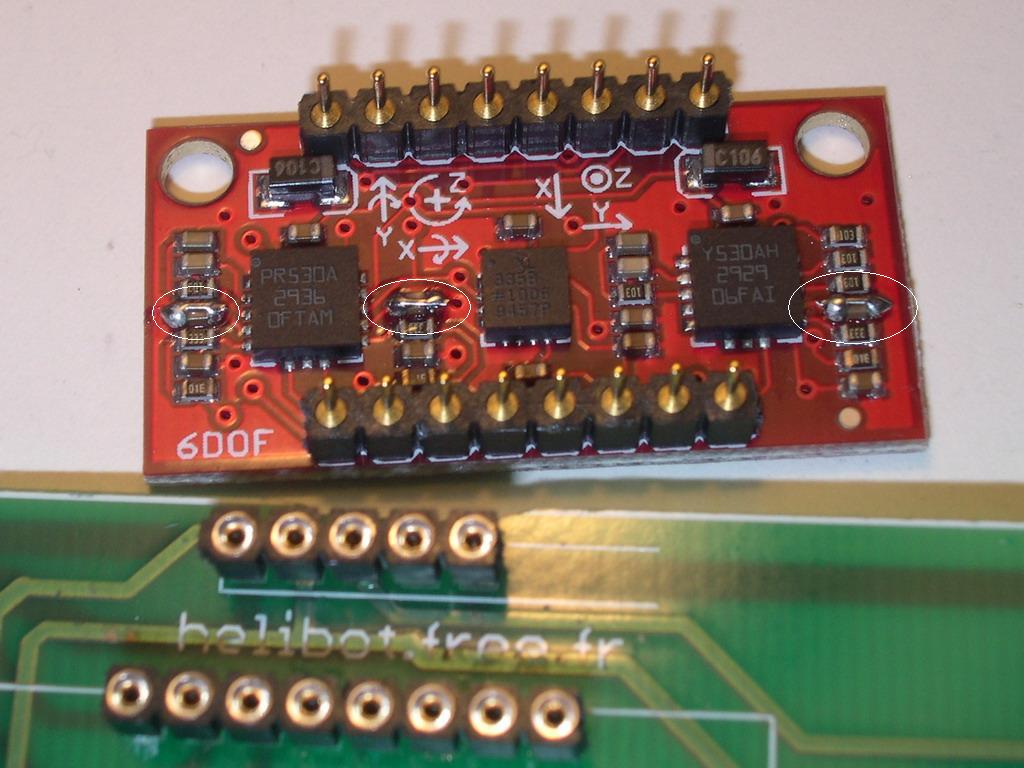
1) Centrale Inertielle 6DOF:
http://www.sparkfun.com/commerce/product_info.php?products_id=9431
Sparkfun a intégré des filtres "passe haut" dans cette centrale inertielle, et dans d'autres produits à base de gyro. Un filtre passe haut sert à supprimer les basses fréquences, pour ne conserver que les hautes fréquences. En sortie d'un gyro, c'est utile uniquement si on veut détecter un mouvement, sans avoir besoin de précision. Par contre, si on veut estimer une position, les basses fréquences sont indispensables (y compris composante continue 0Hz). Quand on nomme un produit "centrale inertielle" (destinée à déduire une position) et qu'on y met des filtres passe haut, c'est une énorme erreur.
Pour corriger ça, j'ai du désactiver les 3 filtres passe haut des 3 gyros. Il suffit de court-circuiter les 3 condos des 3 filtres passe haut:
Ce problème est connu, on en parle sur les forums:
http://forum.sparkfun.com/viewtopic.php?p=86916
2) Compas magnétique 3D HMC5843:
http://www.sparkfun.com/commerce/product_info.php?products_id=9371
Le HMC5743 est un tripple capteur magnétique (3D) qui s'interface en I2C. Sparkfun propose une platine d'adaptation pour ce capteur quasi impossible à souder en amateur. Platine qui comporte une erreur de conception. Un condensateur "de stockage" a été mal dimensionné. Ce qui fait que le composant plante très très souvent. Il renvoie des valeurs abhérentes, béggaie, etc... La solution? Encore une fois trouvée sur les forums Sparkfun, c'est de rajouter des condos en parallèle.

Sur le forum:
http://forum.sparkfun.com/viewtopic.php?p=68979
Leon.
















