Salut !
Me voila avec un nouveau projet (enfin ça fait un mois que je travail dessus  ) !
) !
Le but de ce robot est de participer à la coupe Eurobot2011 (uniquement la coupe de France).
Une partie dure 1min30, le robot doit être autonome et capable de déplacer des pions sur les cases de sa couleur ainsi que d'empiler les pions. (le règlement se trouve ici : Règlement ).
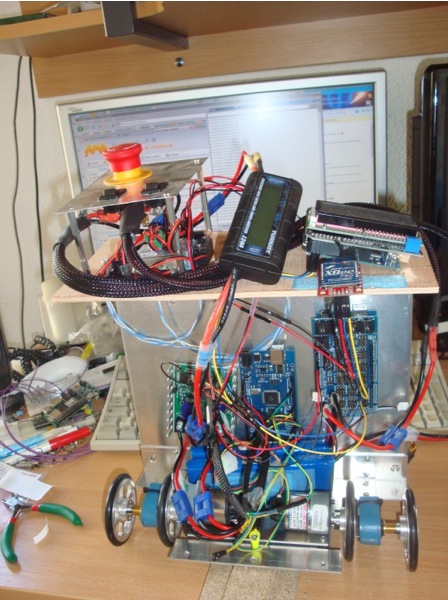
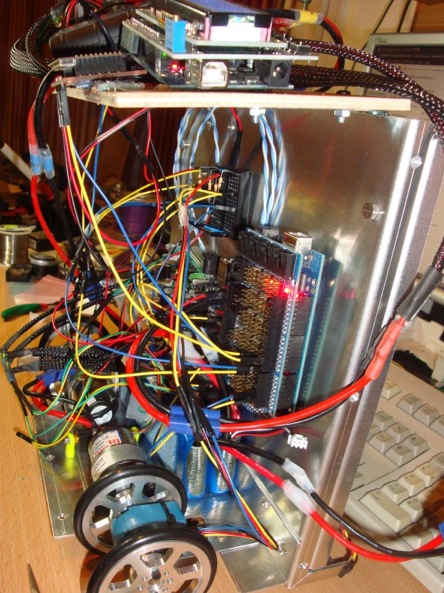
J'ai donc commencé par faire la partie déplacement du robot, et c'est pratiquement terminé.
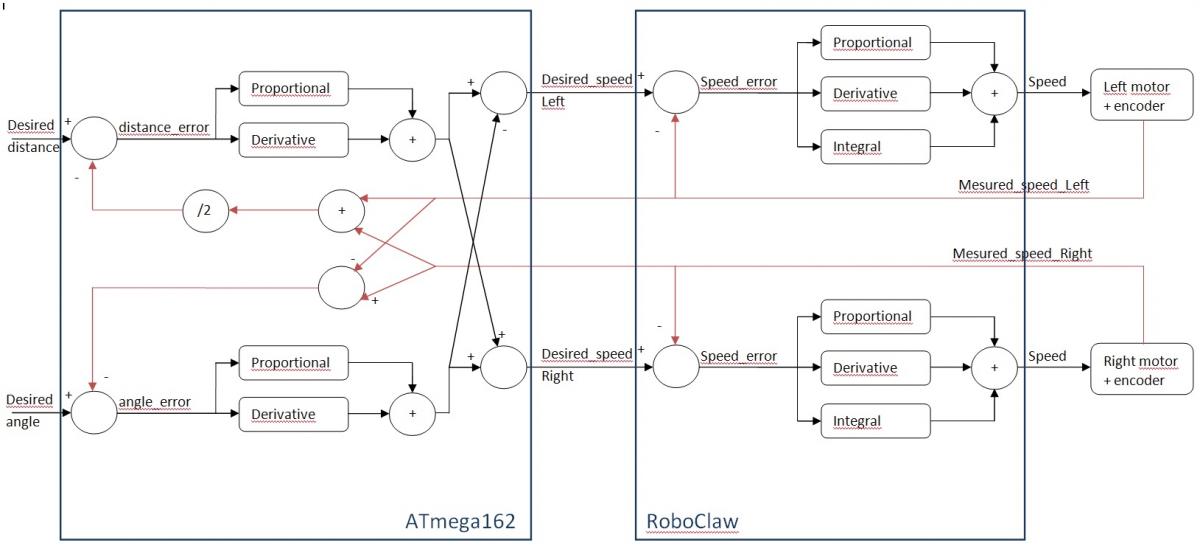
L'électronique de la partie déplacement se compose de 2 "cartes" de contrôle :
- Une carte RoboClaw qui fait un asservissement en vitesse (PID) sur les moteurs
- Un ATmega162 qui fait le calcul de position et l'asservissement en position (PD) du robot
Voici un schéma illustrant l'asservissement (pas très compréhensible pour quelqu'un qui n'aurait jamais fait d'automatique je pense ^^)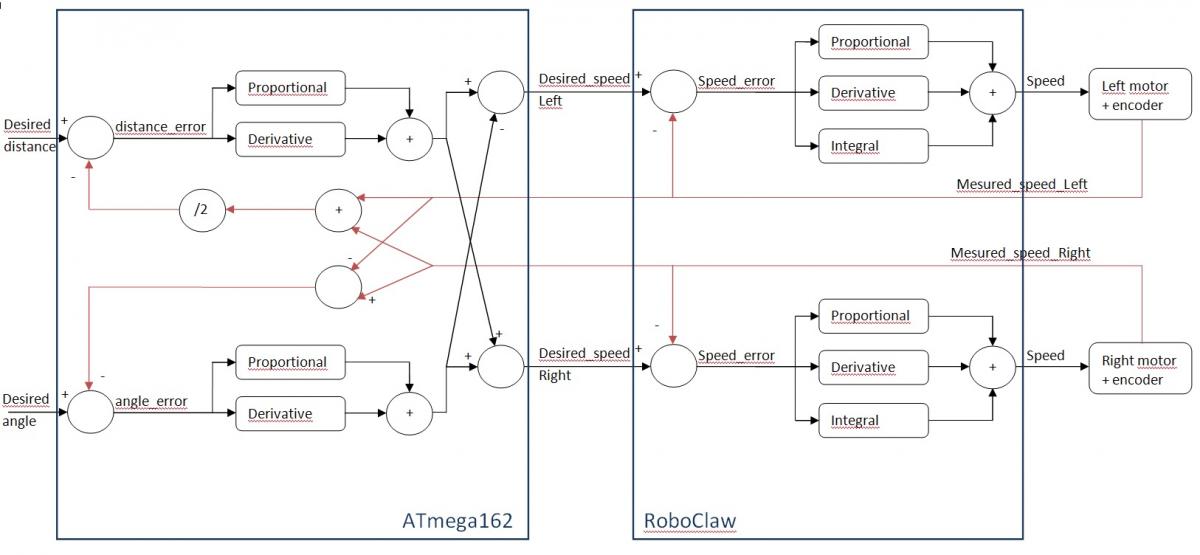
J'ai aussi mis en place un module ROS (Robot Operating System) permettant de récupérer les informations du robot et de les afficher sur un environnement graphique, ce qui permet de le débugger plus facilement.
Ce robot finira surement comme robot personnel autonome se baladant dans mon appart, mais ça sera sa 2ème vie ca ^^
Maintenant il faut que je m'attaque à la mécanique et à la préhension des pions.
Et voici une première vidéo de l'interface graphique et du robot :
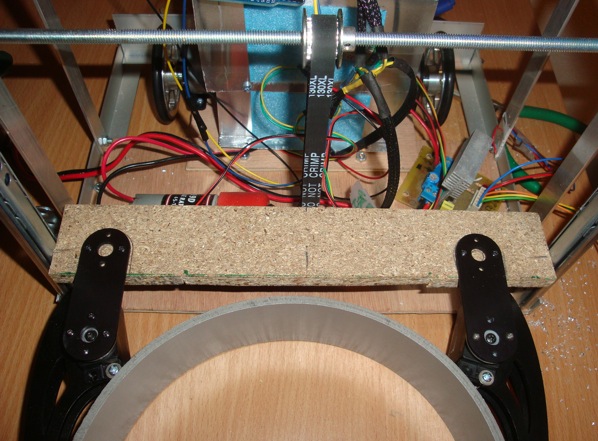
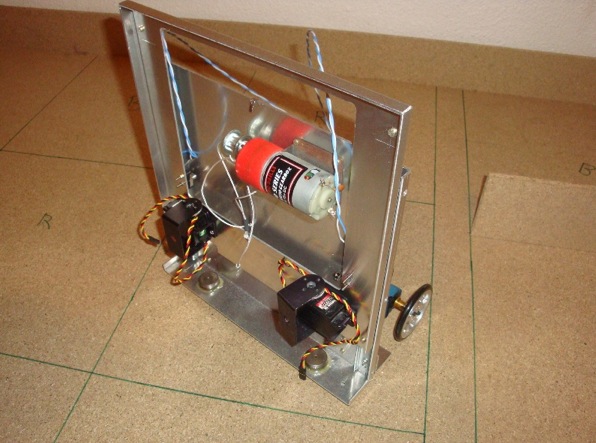
J'ai ensuite fait un premier prototype de base mécanique pour le robot qui permet uniquement de prendre des pions et de les déplacer, il ne peut pas encore les empiler.

Je n'ai pas encore eut l'occasion de tester le bon fonctionnement de la chose, il me manque encore des composants et surtout il faut que je code un "cerveau" au robot pour qu'il cherche les pions et les attrape.
Au passage, j'ai implémenté l'asservissement que j'avais fait sur une carte arduinoMega pour permettre la réutilisation facile du code par un peu n'importe qui. Le code est disponible ICI. Il y a eut pas mal de modifications à faire pour que ca marche sur l'arduino mais bon, maintenant ca semble fonctionner (sauf qu'il faut que je change mes constantes de PID étant donné que la fréquence des timers a changé !).
Et voila un premier test effectué en mode télécommandé :
Voici maintenant une petite vidéo du robot en autonome. Ce test est surtout fait pour l'homologation et un début de match. Le but est de prendre un pion est d'aller le mettre directement en zone protégée pour s'assurer 10 points à tous les matchs.
Voila, c'est tout pour le moment, j'updaterais au fur et à mesure que je progresse