Voici en quelques mots le principe d'un de ces tournois :
Le concours du labyrinthe consiste tout simplement à en sortir le plus rapidement possible.
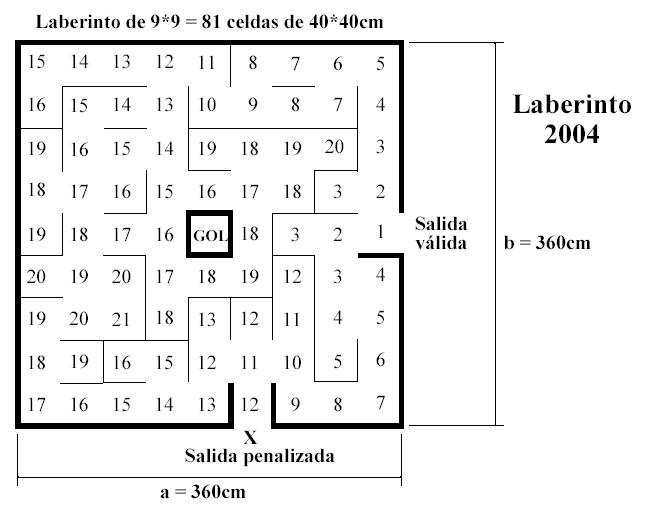
Le robot connait à l'avance le plan du labyrinthe. Mais il ne sais pas d'où il commence !
Plusieurs subtilitées existent : Tout d'abord le robot a un mallus de 30s s'il prend la mauvaise sortie (il y en a deux). De plus, il a un bonus de 30s s'il tire une balle de ping pong au centre du labyrinthe ! Voila qui va corser un peu la chose ...
Cet extrait a été récupéré sur le site des Fribottes. Il a été rédigé suite à leur participation à Hispabot 2004.
Sur le lien d'Hispabot, nous pouvons trouver les règles du concours et le plan du labyrinthe.
Sur le site des Fribottes, il y a de très bonnes informations concernant la réalisation de leurs robots "solveurs de labyrinthe".
Il me semble que le plus compliqué dans l'histoire est de savoir où on est situé dans le labyrinthe (bien que connu à l'avance). Ils utilisent des sharps pour mesurer la distance qui les sépare des cloisons des 4 directions. En fonction de ces mesures ils comparent par rapport à des valeurs qu'ils ont pré-programées. Et en quelques mouvements, ils savent où ils se situent.
Ca me parait assez lourd à réaliser car il faut que le robot soit bien parallèle au mur et bien centré sur la case pour pouvoir prendre de bonnes mesures.
Voyez-vous d'autres solutions pour résoudre le labyrinthe et/ou d'autres difficultés dans cette catégorie ?