bonjour a tout le monde.
je vais me lancé dans la réalisation d'un quadricoptère contrôlable par wifi via un programme multi-plateforme.
je débute totalement en matière de robotique et votre forum a l'air de bien connaître ce domaine ^^.
je pense a une structure en X faite de barre en aluminium la structure centrale sera en depron (matériaux polymère facile à travailler).
j'aurais besoin de conseil au niveau de la partie électrique/électronique:
-le système {moteur;hélice} je pense reprendre celui de maïck (voir ici)
après la parti pilotage:
-je compte faire une interface graphique pour pc avec dedans l'image de la caméra, le système de guidage avec bouton et raccourci clavier, et toute les mesure ( altitude, niveau de batterie ) tout cela via la wifi ou autre moyen si plus large porté... le tout sera codé en C/C++ je pense.
-puis dans un second temps une sorte de pilotage automatique via gps+détection d'obstacle
je vous post des images pour vous montrez ce que j'espère obtenir.
merci pour l'aide que vous pourrez me fournir.
ps: si vous trouvez que certain points sont impossible à faire merci de me le dire.

quadricopter wifi contrôlable multi-plateforme
Débuté par PuLs4r, juil. 04 2011 09:01
5 réponses à ce sujet
#2

Leon
-

- Membres
-

- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 04 juillet 2011 - 09:26
Impossible, non... Rien n'est impossible (quoi que).
Par contre, oui, c'est compliqué, ça oui! Surtout pour un début en robotique. J'espères que tu as des bases en électronique ou autre.
N'hésites pas à t'inspirer de BOB4, mon drone, même si ça n'est pas la même base .
Leon.
Par contre, oui, c'est compliqué, ça oui! Surtout pour un début en robotique. J'espères que tu as des bases en électronique ou autre.
N'hésites pas à t'inspirer de BOB4, mon drone, même si ça n'est pas la même base .
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#3
PuLs4r
-
- Membres
- 4 messages
Nouveau membre
Posté 04 juillet 2011 - 09:49
je vais aller faire un tour sur ton projet.
voila j'ai retrouver la maquette de l'interface de commande graphique:
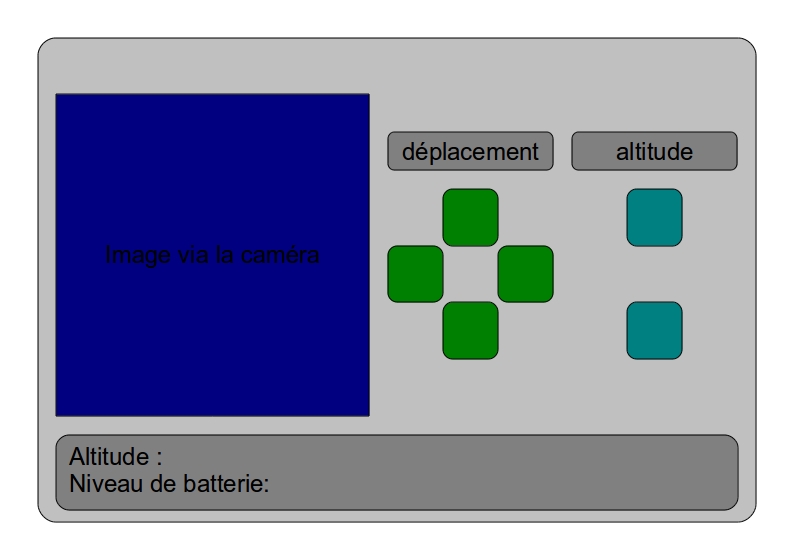
voila j'ai retrouver la maquette de l'interface de commande graphique:
#4
Astondb8
-

- Membres
-
- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 04 juillet 2011 - 10:37
Bonsoir
Je trouve effectivement ça bien gonflé pour un 1er projet. Mais bon pourquoi pas au contraire.
Seule chose je fais une différence entre les Robots (Roulants à pattes volants) capables de ce débrouiller seuls
et les machines télécommandées qui sont pilotées par un utilisateur distant.
A l'aide de fils, ou de Wifi en passant par tous les moyens de communication disponibles aujourd'hui.
Cela dit, cela ne retire rien à la difficulté de les réaliser, bien au contraire.
cdlt
Yves
Je trouve effectivement ça bien gonflé pour un 1er projet. Mais bon pourquoi pas au contraire.
Seule chose je fais une différence entre les Robots (Roulants à pattes volants) capables de ce débrouiller seuls
et les machines télécommandées qui sont pilotées par un utilisateur distant.
A l'aide de fils, ou de Wifi en passant par tous les moyens de communication disponibles aujourd'hui.
Cela dit, cela ne retire rien à la difficulté de les réaliser, bien au contraire.
cdlt
Yves
#5
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 05 juillet 2011 - 05:36
L'interface graphique, ça sera une toute petite partie du projet. Ca n'est pas, et de loin, le plus compliqué. Je te conseille sérieusement d'étudier tout le reste avant de te lancer!je vais aller faire un tour sur ton projet.
voila j'ai retrouver la maquette de l'interface de commande graphique:
De plus, faire une commande avec un clavier, ça me parait complètement illusoire. Un quadri, ça se pilote avec 4 voies proportionnelles. Donc joystick indispensable, à mon avis.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#6
PuLs4r
-
- Membres
- 4 messages
Nouveau membre
Posté 05 juillet 2011 - 05:23
faire une commande avec un clavier, ça me parait complètement illusoire. Un quadri, ça se pilote avec 4 voies proportionnelles. Donc joystick indispensable, à mon avis.
ok tu as surement raison va pour le joystick je vais commencé a rassemblé tout le matos pour la parti construction et après on commencera la parti électronique.
merci pour ton aide en tout cas








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




