

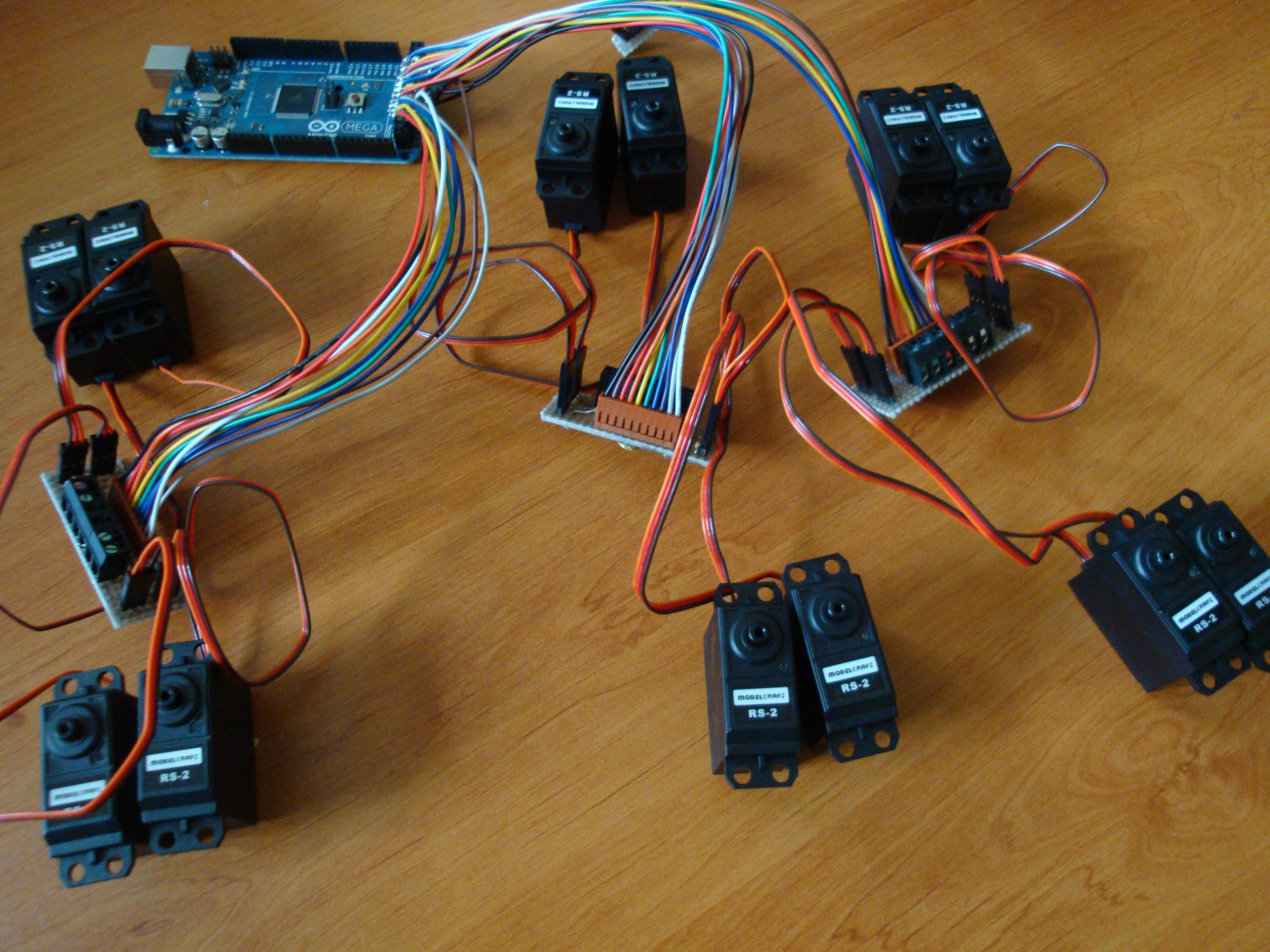
j'ai déjà fait mes commandes: une arduino mega, un capteur IR sharp, 18 servo-moteur et d'autre composant secondaire.
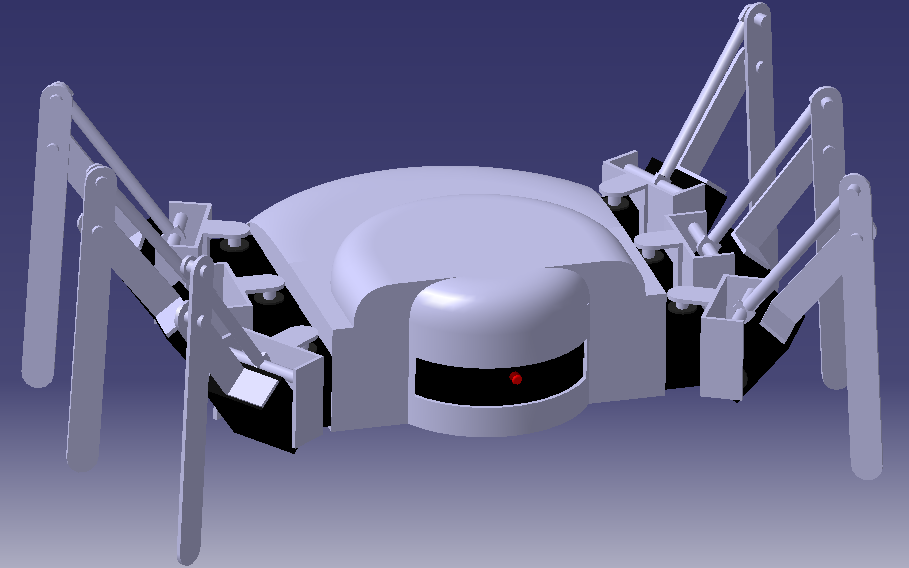
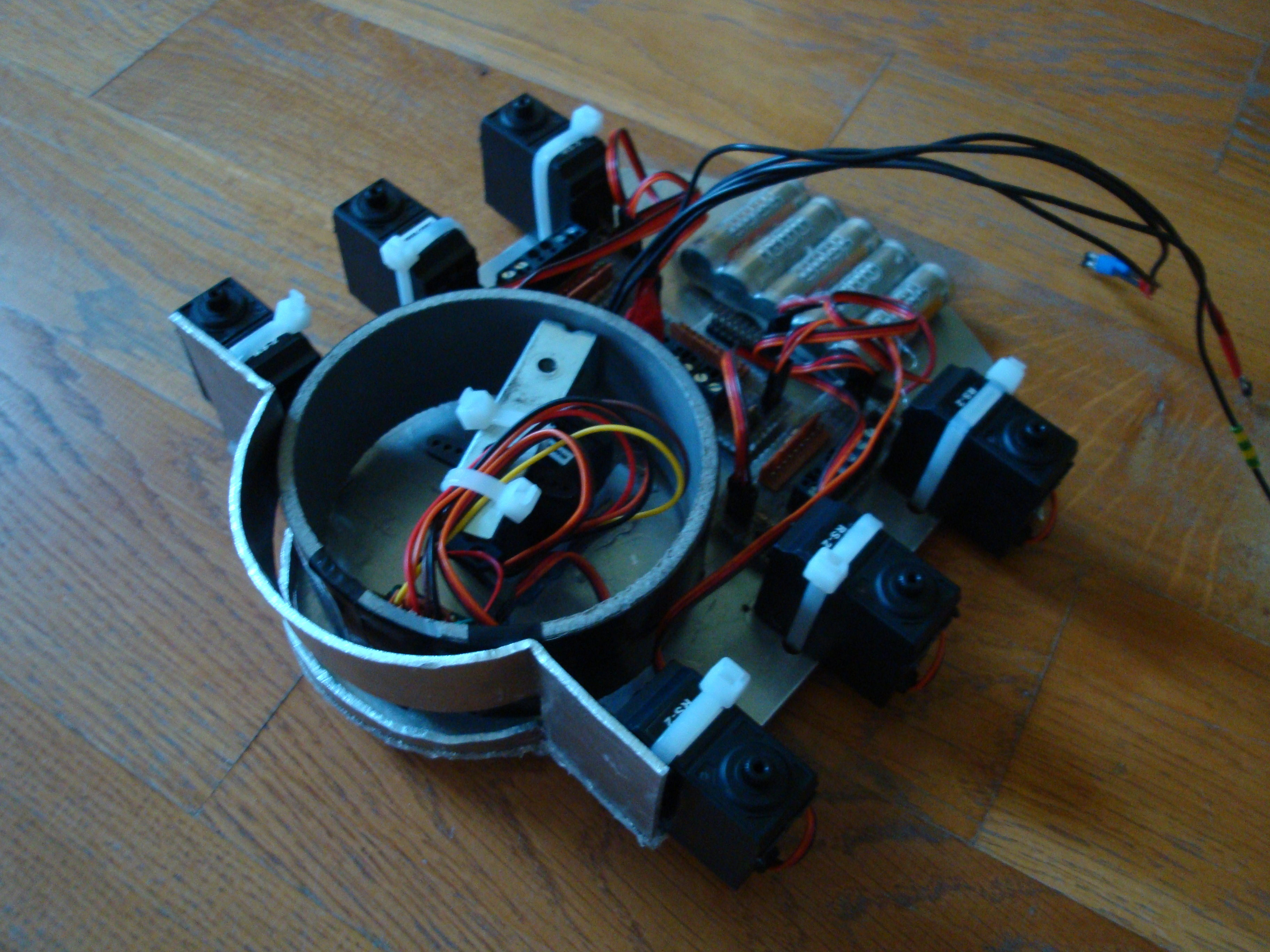
Donc un robot a 8 pattes qui pourra entre autre monter les escalier! avec a l'avant un capteur IR rotatif pour avoir une "image" du terrain.
pour le moment j'ai du mal a concevoir ma plateforme. Je veut me limiter a 2 degré de liberté par pattes (pour des raison économique) et j'aimerai conservé un chassie de "petite" taille. (20 cm maxi).
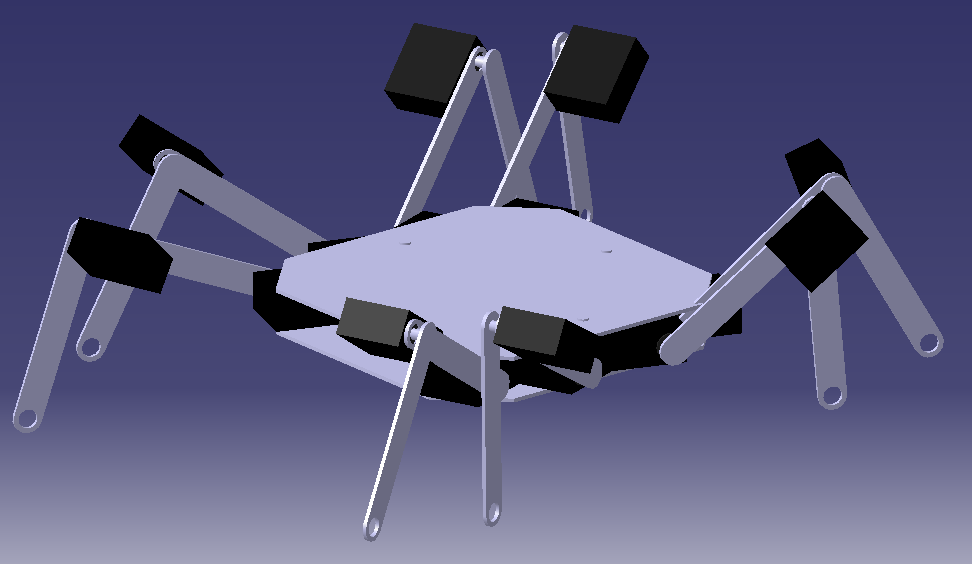
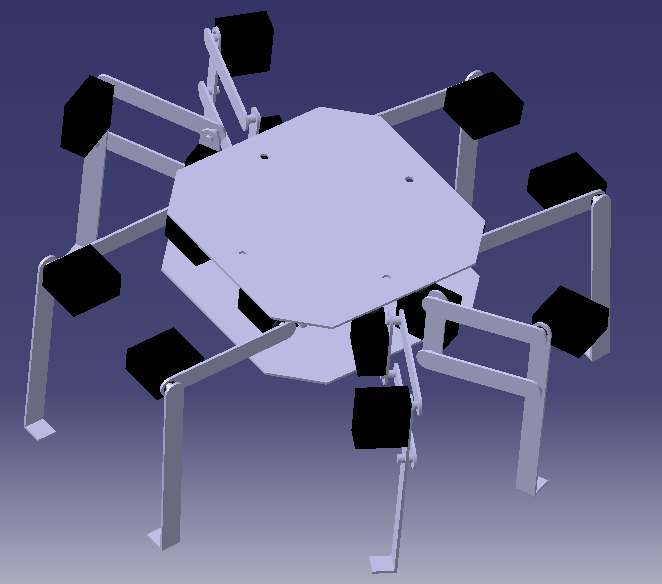
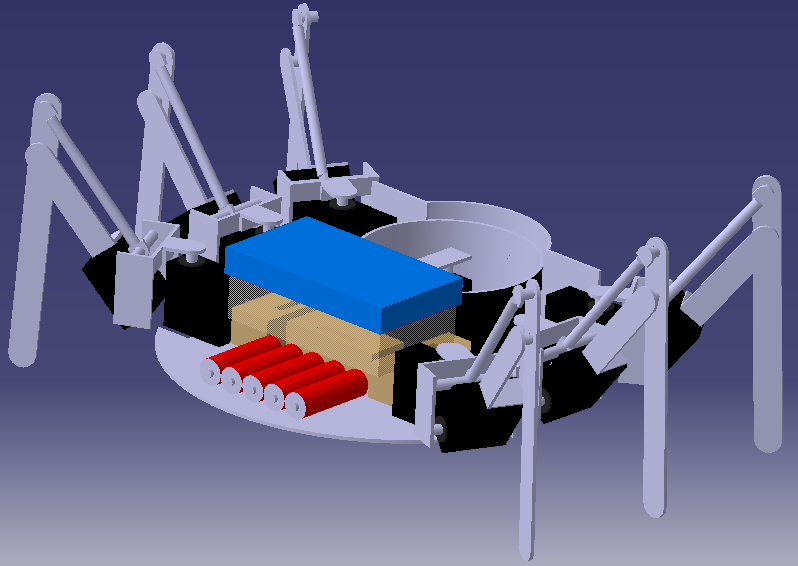
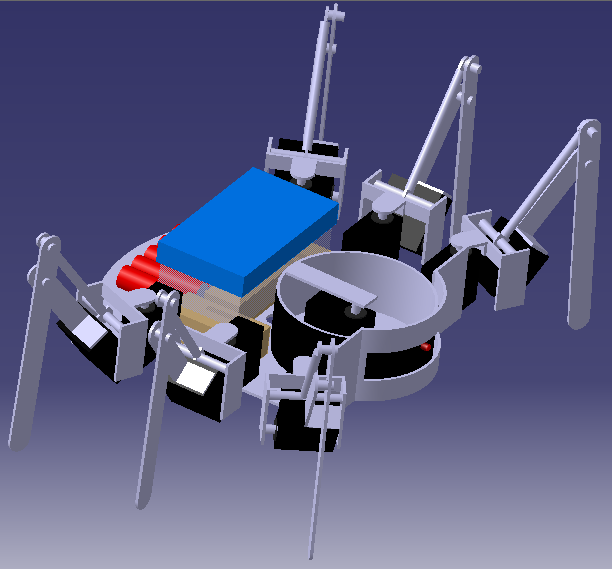
Voila les deux solution que j'ai imaginer et dessiner:
La première solution pose un problème car les pattes n'ont pas beaucoup de place pour pivoter.
La deuxième solution ne permet pas la rotation des pattes mais le déplacement et normalement assuré (je pense)
Qu'en pensez vous ? Les conseil et suggestion sont les bienvenu

























{kind=link}