Voila aprés avoir pas mal ramé avec Yves sur ma communication entre mon pc et mon carte arduino 1280 j'arrive enfin a communiquer mon robot.
Mais j'ai un problème de reception ou autres car qd je teste mon programme en usb aucun bug mes moteurs tournent bien et s'arrete quand j'envoie la lettre Z
Tout le code fonctionne sans aucun prb ... Par contre quand je suis en sans fil il y a des louper parfois cela fonctionne et des fois cela ne fait rien du tt cela ne prends pas en compte la touche ou lgtps aprés ....
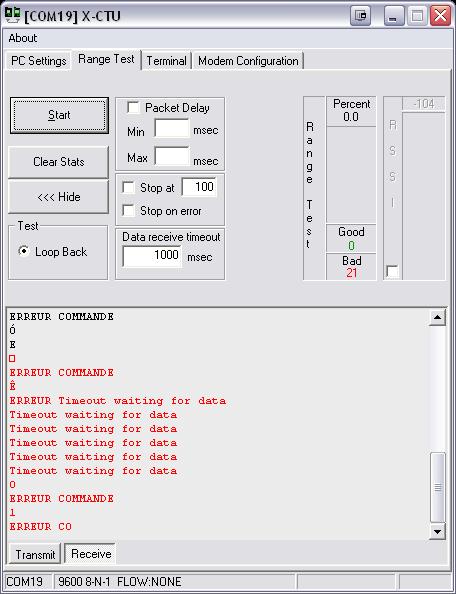
Dans xtcu (cf capture qd je fais une test dans range Test > start j'obtient une reception quasi null.
au niveau des xbee ils sont l'un a coté de l'autre donc cela ne peut pas etre la distance ...
code de mon programme arduino
int dir1PinA = 13;
int dir2PinA = 12;
int speedPinA = 10;
// motor B
// motor A
int dir1PinB = 11;
int dir2PinB = 8;
int speedPinB = 9;
char valeur;
int speed;
void setup() {
Serial.begin(9600);
Serial.println("KBOT ARDUINO CONNECTED");
pinMode(dir1PinA, OUTPUT);
pinMode(dir2PinA, OUTPUT);
pinMode(speedPinA, OUTPUT);
pinMode(dir1PinB, OUTPUT);
pinMode(dir2PinB, OUTPUT);
pinMode(speedPinB, OUTPUT);
}
void loop() {
analogWrite(speedPinA, 80);
analogWrite(speedPinB, 80);
// set direction
if (Serial.available() ) {
byte valeur = Serial.read();
Serial.println(valeur, BYTE);
if (valeur == 'a')
{
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, HIGH);
digitalWrite(dir1PinB, HIGH);
digitalWrite(dir2PinB, LOW);
Serial.println("AVANT COMMANDE OK");
}
else if(valeur == 'q')
{
digitalWrite(dir1PinA, HIGH);
digitalWrite(dir2PinA, LOW);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, HIGH);
Serial.println("ARRIERE COMMANDE OK");
}
else if(valeur == 'z')
{
digitalWrite(dir1PinA, LOW);
digitalWrite(dir2PinA, LOW);
digitalWrite(dir1PinB, LOW);
digitalWrite(dir2PinB, LOW);
Serial.println("STOP COMMANDE OK");
}
else
{
Serial.println("ERREUR COMMANDE");
}
}
delay(100);
}
Voila est ce que qq'un aurait une idée parce que là je ne comprends plus trop ...
Cordialement,
bypbop