ayant depuis peu ma carte Arduino et m'étant familiarisé avec elle, je lance maintenant les hostilités et cherche a contrôler un moteur CC.
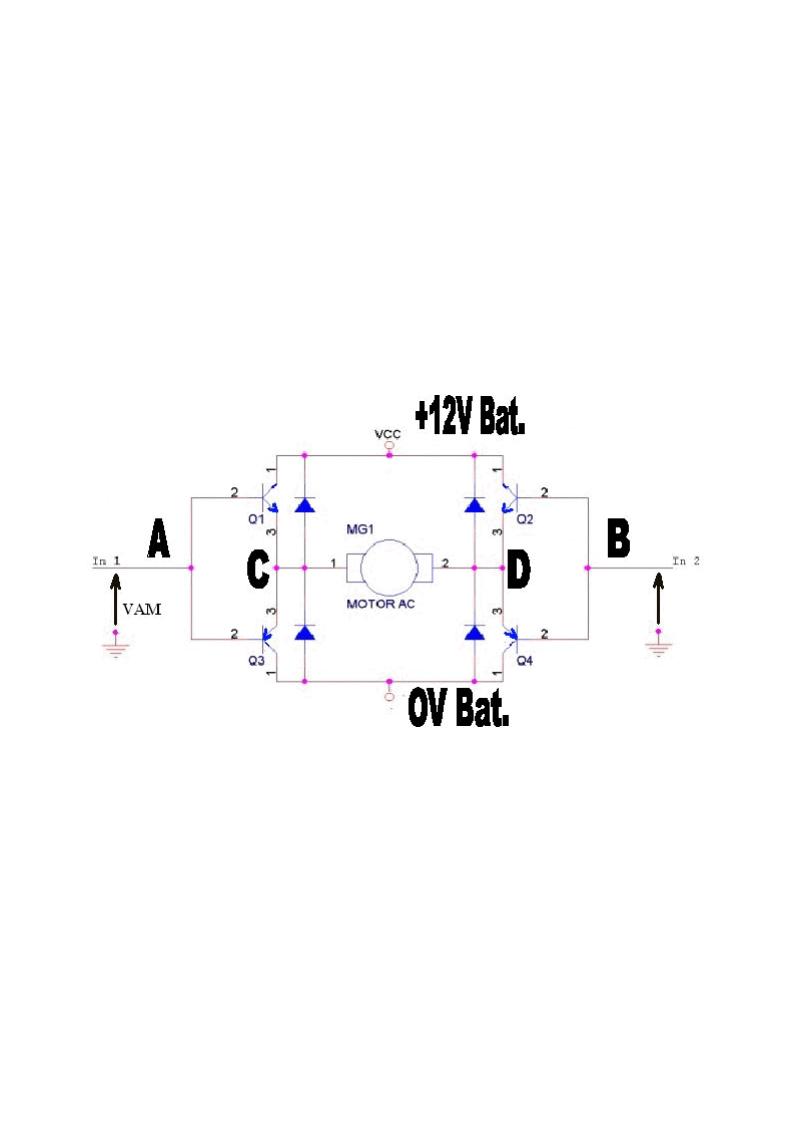
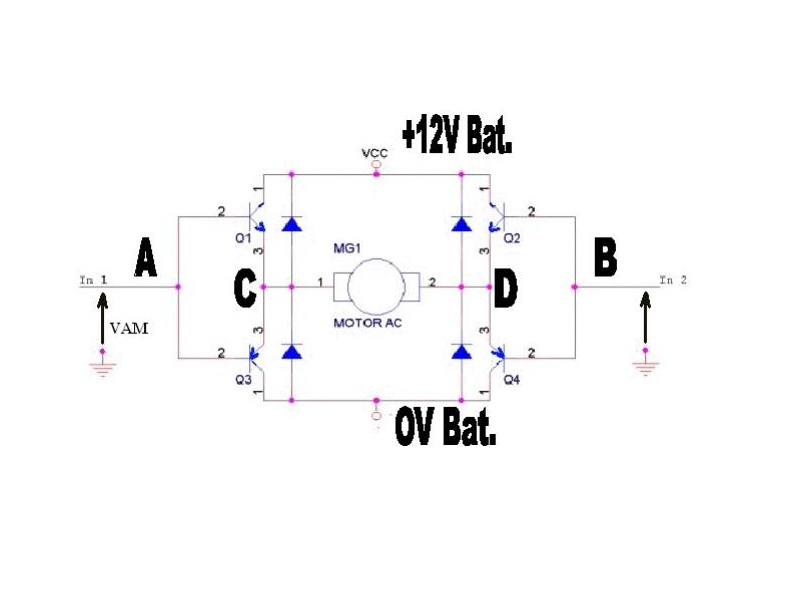
Comme j'aime comprendre ce que je fais, et que je le fais dans un but pédagogique, j'aimerais éviter l'utilisation d'un shield ou d'un circuit intégré. Avec mon père, nous avons fait une ébauche de ce qui devrait piloter notre moteur (cf le fichier joint : un schéma identique trouvé par la suite sur le net...). In 1&2 seraient des sorties de l'Arduino. Nous étions convaincus qu'il fonctionnerait, avant que je ne lise que ce montage ne fonctionnait qu'en théorie...
Je cherche donc confirmation : ce schéma fonctionne-t-il ? Mon alimentation serait probablement en 1,5V sur un moteur de récup', pour limiter son régime.
Y a-t-il encore des résistances a placer ? (c'est ma hantise ^^') Si c'est le cas, comment dois-je calculer leur valeur ? (J'ai plus ou moins cerné la loi d'Ohm, mais il y a toujours des choses qui m'échappent)
Merci de m'avoir lu, et bonne soirée.
Edit : J'avais oublié le schéma...