

Me revoilà avec toujours avec le même projet mais cette fois-ci plus complet et plus aboutit. J'ai décidé de créer un nouveau sujet histoire de repartir sur de bonnes bases. Je me lance dans la conception et la réalisation d'une petite voiture télécommandé. Elle ne sera pas très grande, avec un châssis plutôt de base rectangulaire, les deux roues arrières seront motrices et les deux de devant directrices. La voiture sera contrôlé par une télécommande infra-rouge.
Voici deux schémas de l'aspect du véhicule :
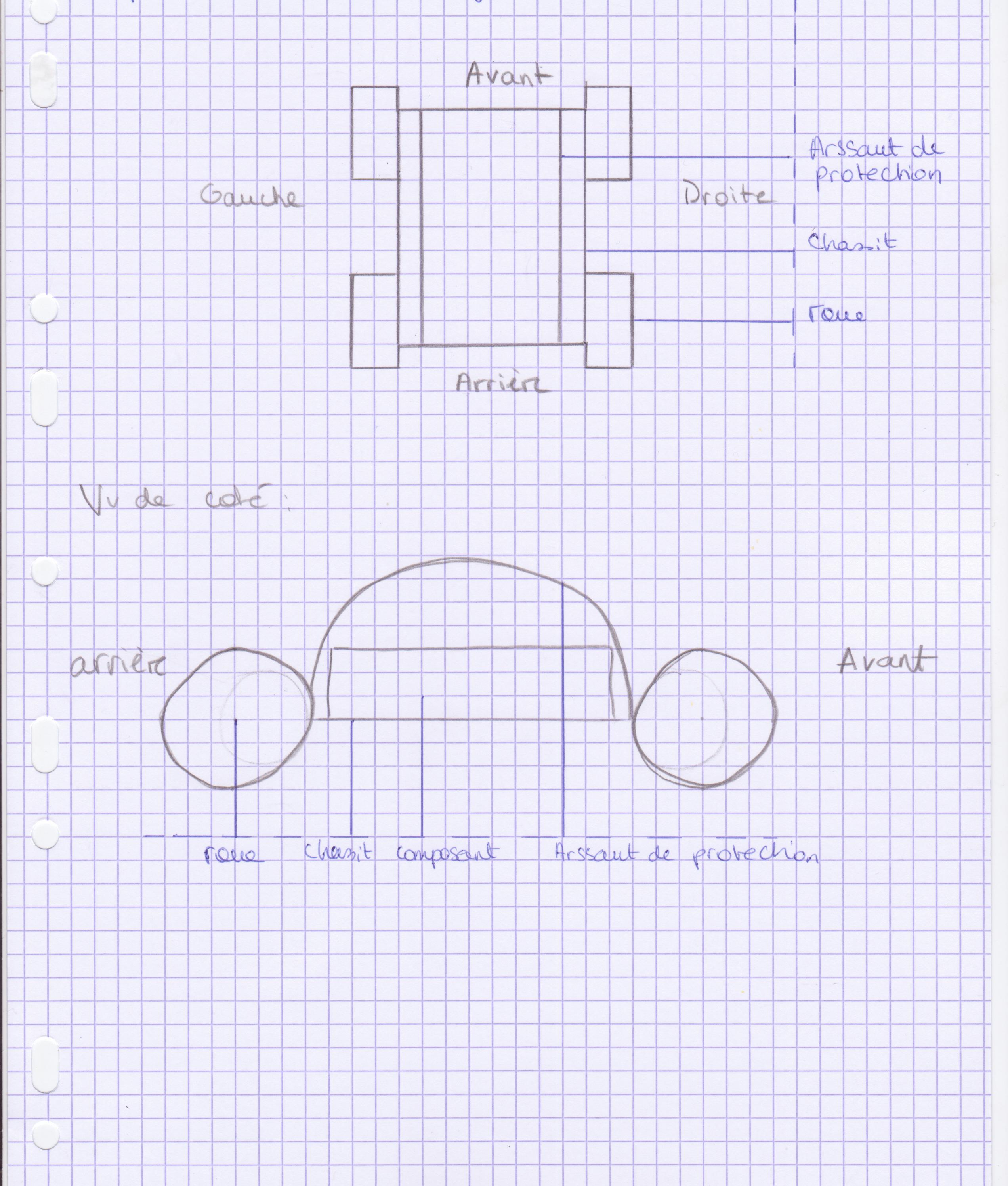
Les composants seront sur le châssis, les roues aux extrémités et je compte mettre deux arc-sauts de protection (Deux barres qui formeront un arc au dessus de la voiture). Je compte mettre des grosses roues en caoutchouc histoire d'avoir une meilleure adhérence et lui permettre dêtre tout terrain. Le châssis sera découpé dans une plaque de plexiglas pour pouvoir être sur mesure

Voici deux schémas de la motorisation et du système de direction du véhicule :
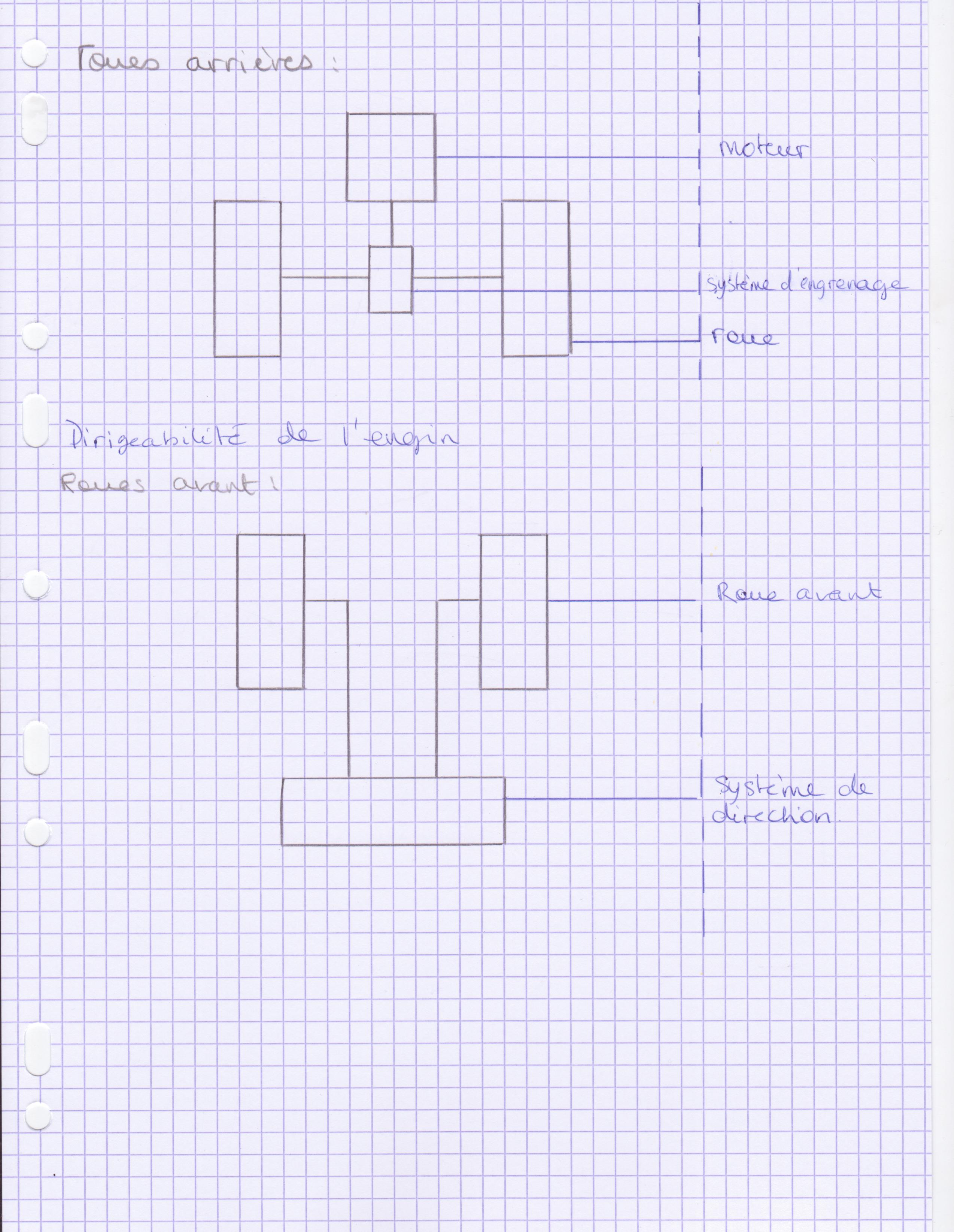
J'ai déjà deux trois questions sur le choix du moteur des roues arrières, il faudrait que la vitesse soit réglable depuis la télécommande et que la voiture puisse partir en marche arrière (J'imagine que le moteur doit tourner dans le sens inverse). De plus je ne sais pas quels composant offrent un système de direction fiable et que je pourrait implanter pour les roues avant.
J'ai fait une listes des composant dont j'aurais besoin, si il en manque dite le moi

Composants :
_Un moteur pour les roues arrières
_Un système d'engrenage
_Un microcontroleur ? (Je me suis renseigné sur internet mais je ne sais toujours pas a quoi ça sert)
_Une télécommande infra-rouge
_4 grosses roues en caoutchouc
_Des plaques de plexiglas pour le châssis
_Des barres en fer légères et modulable pour les arc-saut
Les problèmes rencontrés a mon niveau :
_Il me manque encore une liste complète des composants
_Je ne sais pas comment les connecter entre eux
_Je ne sais pas encore programmer la télécommande avec les différents composants
_Je ne sais pas ou me procurer le matériel, n'y quel marque ou type choisir
Voilà, j'espère avoir assez développer mon projet cette fois-ci et que vous pourrez me donner des conseilles plus précis. Je pense qu'avec votre aide j'arriverais a mener a bien ce projet qui est a mon avis a peu prêt de mon niveau, Je me donnerais les moyens d'y arriver en tout cas
Merci de m'avoir lu

PS: Je n'ai pas de fer a souder, je pense que ça va devenir nécessaire, ou pourrais-je m'en procurer un ?

















