- Bonjour à tous,

Mon projet est de créer un robot "autonome", dans le sens où il pourrait se déplacer seul sans toucher d'objet. J'ai acheté tout le materiel puis je l'ai monté :

Le problème vient au niveau du branchement du capteur à ultrason. Le voyant vers s'allume m'indiquant qu'il est correctement alimenté, mais impossible de le faire marcher (même après avoir testé de nombreux programmes!). Néanmoins les moteurs marchent, car j'ai pu programmer un petit parcours déjà.
http://www.youtube.com/watch?v=Jrzd4yQp9XI&
Mon matériel :
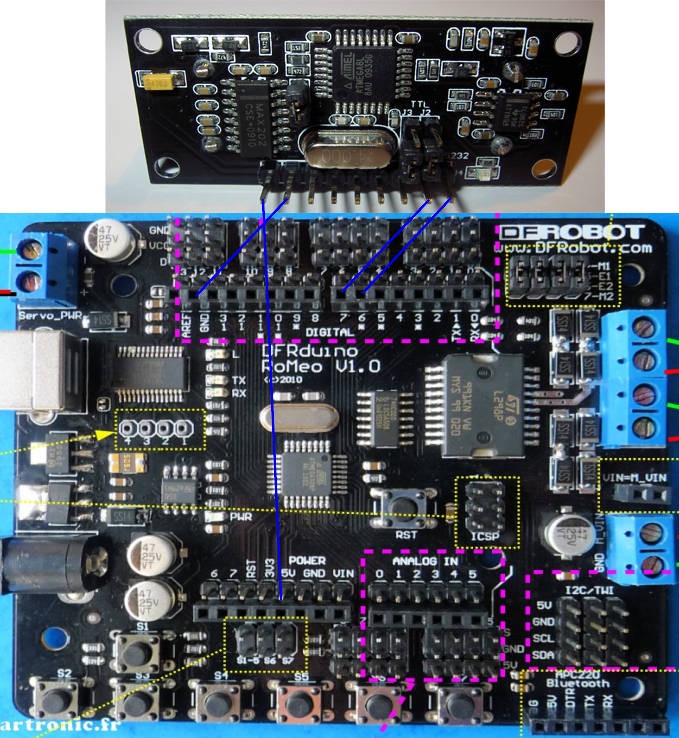
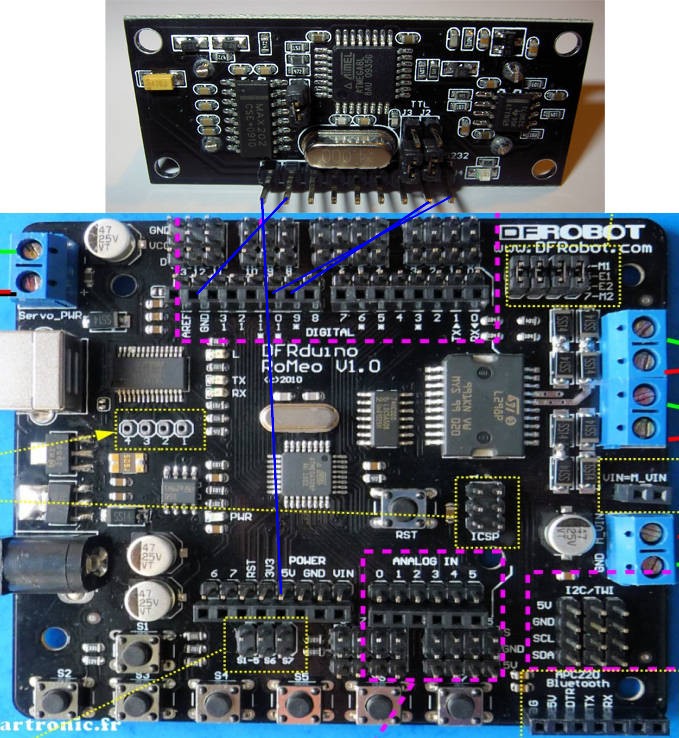
-Carte Romeo
http://www.zartronic.fr/doc/E2/E2N1P214/Guide_Utilisateur_Romeo_2010.pdf
-Capteur à ultrason urm37
http://milesburton.com/URM37_Ultrasonic_Distance_Measurement_Library
http://www.dfrobot.com/wiki/index.php?title=URM37_V3.2_Ultrasonic_Sensor_%28SKU:SEN0001%29
-Codding et explication rapide pour tester :
http://www.botbuilder.co.uk/codeandprojects/bbsonar/index.html
J'ai branché ça un peu n'importe comment car je n'ai aucune idée de comment adapter ça à ma romeo pour que ça marche!
Merci d'avance de porter attention à mon post