
Bonjour,
Je suis en train de construire un robot et j'ai de la difficulté à choisir les moteurs.
Ceux-ci doivent pouvoir tourner sur un angle minimum de 270°, ou en continu, et pouvoir tourner
dans le sens horaire et antihoraire. De plus, ils doivent pouvoir tourner avec une précision
de 90°, pour les contrôler via un microcontrôleur afin de les positionner à 0°, 90°, 180° ou 270°
de façon précise. Finalement, ces moteurs doivent avoir un couple élevé (10 kg/cm et plus serait le mieux).
Le plus facile pour moi serait d'utiliser des servomoteurs, mais en trouver avec les
caractéristiques que j'ai mentionnées s'avèrent difficiles.
Quels types de moteurs me conseilleriez-vous?
Des modèles de moteurs seraient appréciés.
Merci beaucoup,
basesim

11 réponses à ce sujet
#2

Microrupteurman
-

- Modérateur
-

- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 06 février 2012 - 11:54
Bonjour, comme tu compte en degrés, le mieux serai des moteurs pas a pas (pap). Ils possedent un couple excellent a bas prix (tout est relatif ).
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#4
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 07 février 2012 - 01:01
Non elle ne necessite pas de potar, mais par contre d'une carte controlleur special..... Mais en voyant ta question, ca m'en fait m'en poser une : Tu veux faire quoi exactement ??
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#5
basesim
-
- Membres
- 13 messages
Nouveau membre
Posté 07 février 2012 - 02:28
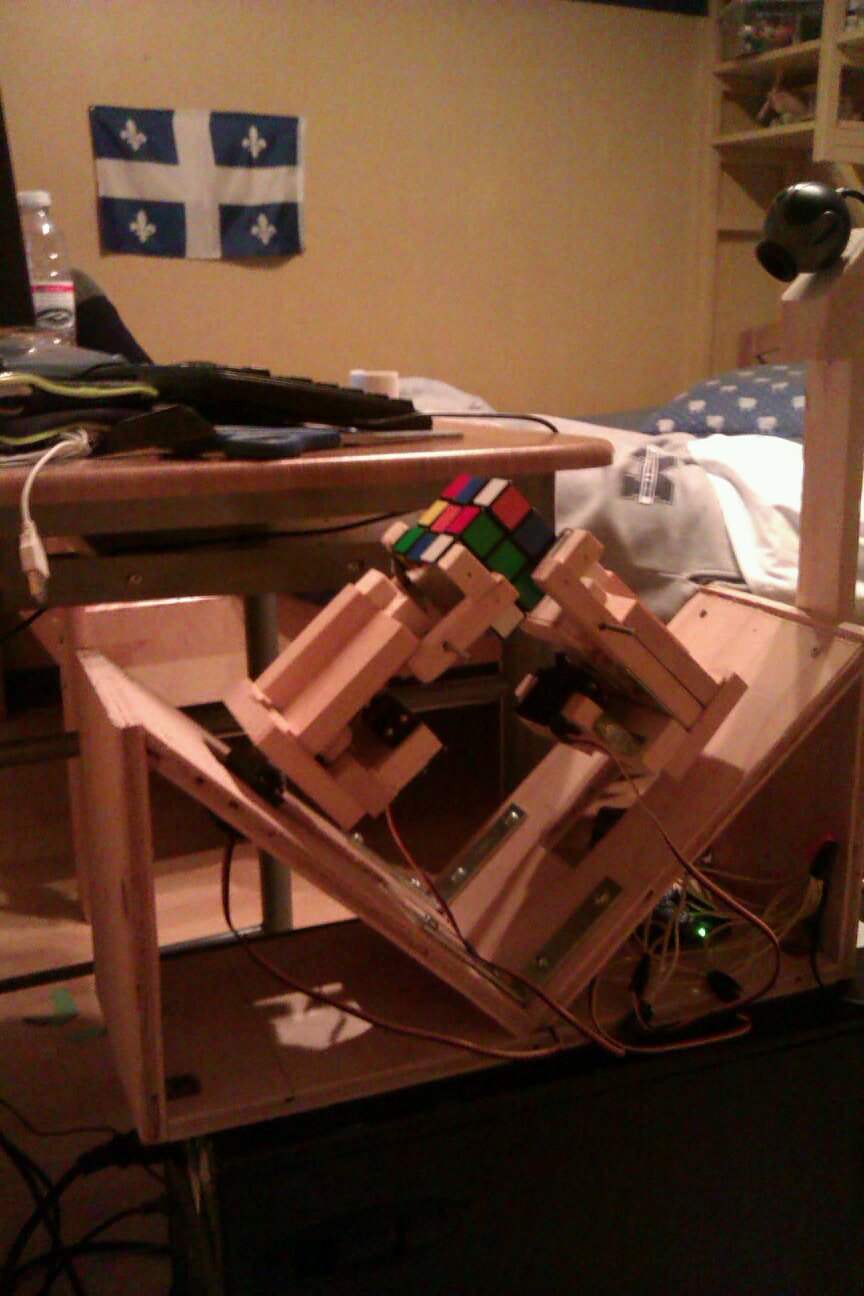
Je construit un robot capable de résoudre un Rubik's cube, c'est pourquoi il faut des moteurs précis. J'ai construit un prototype fonctionnel, avec des servomoteurs fonctionnant sur 180°.Par contre, pour le produit final, je souhaite utilisé des moteurs qui pourront tourné sur 270° ou en continu afin de réduire le nombre de mouvements.
Pour ce qui est de la carte contrôleur spécial, je ne sais pas exactement de quoi tu veux parler, mais pour ma part, j'utilise un microcontrôleur arduino uno.
Je te joint une photo de ce prototype dont je te parle. les moteurs dont il est question dans ce topic sont ceux de la base, ceux qui font tourner les faces.
Pour ce qui est de la carte contrôleur spécial, je ne sais pas exactement de quoi tu veux parler, mais pour ma part, j'utilise un microcontrôleur arduino uno.
Je te joint une photo de ce prototype dont je te parle. les moteurs dont il est question dans ce topic sont ceux de la base, ceux qui font tourner les faces.
Image(s) jointe(s)
#6
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 07 février 2012 - 12:12
oK ! Il existe des servo qui tourne a 360° http://www.zartronic.fr/servo-df05sr-à-rotation-à-360-degrés-55kg-p-301.html.
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#7
Jbot
-

- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 07 février 2012 - 01:01
oK ! Il existe des servo qui tourne a 360° http://www.zartronic.fr/servo-df05sr-à-rotation-à-360-degrés-55kg-p-301.html.
Il recherche quelque chose qui se pilote en position... Donc aucun rapport avec ton lien

Voila ce qu'il te faut : http://www.crustcrawler.com/motors/AX12/index.php
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#8
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 07 février 2012 - 02:32
qui pourront tourné sur 270°
? un servo se pilote en degré ....
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#9
basesim
-
- Membres
- 13 messages
Nouveau membre
Posté 07 février 2012 - 06:57
microrupteurman2 : C'est écrit sur le site : «Note : Tous les servomoteurs tournant à 360° sont en fait modifiés. Ils n'ont pas de contrôle de position ni de retour. Le signal PWM sert à contrôler la vitesse et non la position.»
Dans le manuel du moteur Dynamixel, il est écrit qu'il faut un contôlleur CM-5, est-ce qu'un Arduino Uno fonctionnerait également?
C'est également écrit : «300°, Endless Turn» , qu'est-ce que cela signifie?, qu'il peut tourner en continue mais n'est précis que sur 300°?
Et finalement, Pouvez-vous me dire quelle est la différence entre un sero et un actuateur?
En tout cas, merci de vos réponse!
Dans le manuel du moteur Dynamixel, il est écrit qu'il faut un contôlleur CM-5, est-ce qu'un Arduino Uno fonctionnerait également?
C'est également écrit : «300°, Endless Turn» , qu'est-ce que cela signifie?, qu'il peut tourner en continue mais n'est précis que sur 300°?
Et finalement, Pouvez-vous me dire quelle est la différence entre un sero et un actuateur?
En tout cas, merci de vos réponse!
#10
Astondb8
-

- Membres
-
- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 09 février 2012 - 06:15
Les AX12 peuvent être piloté par une Arduino et une librairie adaptée.
Ils fonctionnent par pilotage série (Half duplex)
Ils ont une rotation Max de 300 ( donc parfait dabs ton cas)
Les CM5 ou autre sont assez cher pour ce qu'ils font. Il est donc inutile d'en acheter un.
J'ai 8 AX12 qui fonctionner parfaitement. Demande à Jbot (qui te les a conseillé un toute connaissance des choses.
Il utilise actuellement mes AX12 sur son robot destiné à la coupe de France et les à montés sur deux bras.
Il y a d'éducation façon de faire pour les piloter.
La 1ère (celle que j'utilise) est une solution ou tu shunt RX et TX. La séparation des send et des read est faite par code
L'autre solution est de faire un petit montage que tu trouvera sur la doc Robotis assez simple à réaliser.
Ce sont de très bon servos fiables et tu fournissant pas mal d'infos de retour que tu peux intégrer à ton code.
ils peuvent également tourner en continu sans modification. Très appréciable car tu n'est pas obligé de casser les butés et simplement par cide demander qu'ils tournent en continu.
Bien sur dans ces conditions, oublié les commandes de position. Ça devient un moteur cc ni plus ni moins. Mais ils peuvent à nouveau redevenir servi moteur en envoyant la bonne commande.
Cdlt
Yves
Ils fonctionnent par pilotage série (Half duplex)
Ils ont une rotation Max de 300 ( donc parfait dabs ton cas)
Les CM5 ou autre sont assez cher pour ce qu'ils font. Il est donc inutile d'en acheter un.
J'ai 8 AX12 qui fonctionner parfaitement. Demande à Jbot (qui te les a conseillé un toute connaissance des choses.
Il utilise actuellement mes AX12 sur son robot destiné à la coupe de France et les à montés sur deux bras.
Il y a d'éducation façon de faire pour les piloter.
La 1ère (celle que j'utilise) est une solution ou tu shunt RX et TX. La séparation des send et des read est faite par code
L'autre solution est de faire un petit montage que tu trouvera sur la doc Robotis assez simple à réaliser.
Ce sont de très bon servos fiables et tu fournissant pas mal d'infos de retour que tu peux intégrer à ton code.
ils peuvent également tourner en continu sans modification. Très appréciable car tu n'est pas obligé de casser les butés et simplement par cide demander qu'ils tournent en continu.
Bien sur dans ces conditions, oublié les commandes de position. Ça devient un moteur cc ni plus ni moins. Mais ils peuvent à nouveau redevenir servi moteur en envoyant la bonne commande.
Cdlt
Yves
#11
basesim
-
- Membres
- 13 messages
Nouveau membre
Posté 10 février 2012 - 05:57
Merci énormément pour vos réponses , Ce seront donc les servos que j'achèterai.
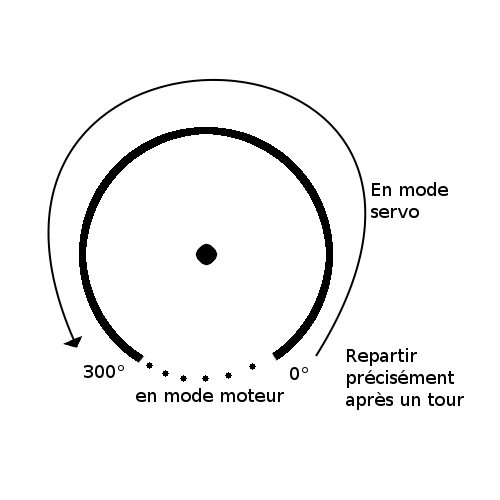
J'ai une dernière question, est ce qu'il est possible d'éffectuer l'action que
j'ai déssinée dans mon shéma?
Par exemple, lorsque mon servo est en postion 270 et que je veux revenir à
la postion 0 en mode servo, est-ce que je peux passer par le chemin le plus
court, en passant par le mode moteur que tu mentionne Astondb8, et revenir dans
le mode servo à 0°?
Ou dois-je repasser par les 270°, faire le grand tour, afin de rester précis dans
le mode servo?
, Ce seront donc les servos que j'achèterai.J'ai une dernière question, est ce qu'il est possible d'éffectuer l'action que
j'ai déssinée dans mon shéma?
Par exemple, lorsque mon servo est en postion 270 et que je veux revenir à
la postion 0 en mode servo, est-ce que je peux passer par le chemin le plus
court, en passant par le mode moteur que tu mentionne Astondb8, et revenir dans
le mode servo à 0°?
Ou dois-je repasser par les 270°, faire le grand tour, afin de rester précis dans
le mode servo?
#12
Astondb8
-
- Membres
-
- 1â¯111 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 10 février 2012 - 06:26
La réponse est bien evidament non.
Il est même fortement recomendé d'initialiser tres servos sur une plage valide. Donc de préférence interdire les passages par des positions non valides (301/380) qui n'existent pas peur le qervo. Dans ces cas là il donne ses valeurs incohérentes.
En fait il ne dialogue pas en degrés. Mais en valeurs numérique.
0 = 0 degré
1024 =300 degrés
D'expérience, lorsque tu passe pas des positions non valides il te renvoi n'importe quoi (2195 ou n'importe quoi d'autre dans le genre) tu peux bien sur dans ton code filtrer les valeurs non comprises entre 0 et 1024 mais tu ne sais jamais de suel côté il va repartir.
Un servo à habituellement des butés mécaniques pour éviter cela. Dans le cas de l'AX12 c'est différent puisque tu peux passer en rotation continue. Mais il y a quelques précautions à prendre tout de même.
Pour info
Il n'y a pas de buté mécanique mais tu peux programer des limites logiciel. Des points ou tu lui interdit d'aller. Lui demandant par exemple de ne travailler que sur une plage de 100 à 210 et il respectera ces limites mais une fois le courant coupé il peut aller n'importe ou (par l'attraction par exemple) donc met lui des butés mécaniques pour éviter les démarrages sur des positions interdites.
Cdlt
Yves
Il est même fortement recomendé d'initialiser tres servos sur une plage valide. Donc de préférence interdire les passages par des positions non valides (301/380) qui n'existent pas peur le qervo. Dans ces cas là il donne ses valeurs incohérentes.
En fait il ne dialogue pas en degrés. Mais en valeurs numérique.
0 = 0 degré
1024 =300 degrés
D'expérience, lorsque tu passe pas des positions non valides il te renvoi n'importe quoi (2195 ou n'importe quoi d'autre dans le genre) tu peux bien sur dans ton code filtrer les valeurs non comprises entre 0 et 1024 mais tu ne sais jamais de suel côté il va repartir.
Un servo à habituellement des butés mécaniques pour éviter cela. Dans le cas de l'AX12 c'est différent puisque tu peux passer en rotation continue. Mais il y a quelques précautions à prendre tout de même.
Pour info
Il n'y a pas de buté mécanique mais tu peux programer des limites logiciel. Des points ou tu lui interdit d'aller. Lui demandant par exemple de ne travailler que sur une plage de 100 à 210 et il respectera ces limites mais une fois le courant coupé il peut aller n'importe ou (par l'attraction par exemple) donc met lui des butés mécaniques pour éviter les démarrages sur des positions interdites.
Cdlt
Yves
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




