je me lance dans la conception et construction d'un drone de forme sphérique, voici les premières indications:
ø 600
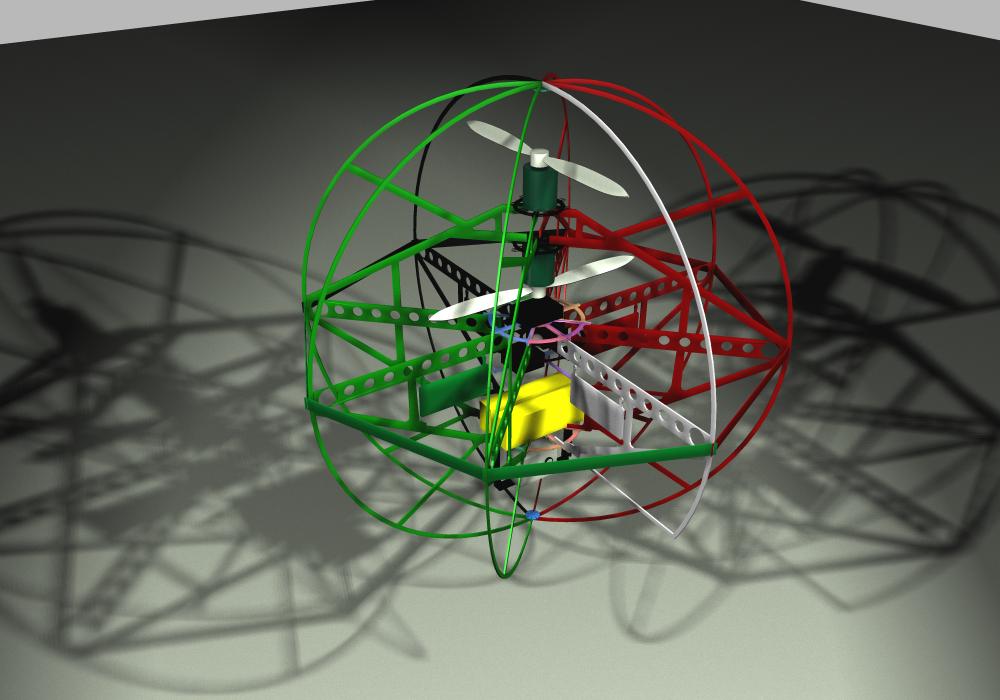
structure aluminium comprenant 8 arceaux relié à une série de platine au centre, pour recevoir 2 moteur brushless en contrerotation avec des hélices de 12x6, 2 controleurs esc, recepteur 5 voies proportionnelles et 4 en tout ou rien. 4 volets en croix reliés 2 par 2.
je cherche la possibilité de faire varié la vitesse des moteurs afin qu'il tourne sur lui même dans un sens ou dans l'autre, sachant qu'il faut aussi que l'accélération puisse se faire
de façon égal aussi.
autres question en suspend, le centre de gravité actuel est 18 mm en dessous du centre le la sphère, à peu près au même niveau que les volets, je pense ainsi évité un mouvement de bascule lorsque les volets seront opérants,en cas d'un CG trop bas, le CG audessus du centre ne me semble pas être une bonne solution, j'ai placé les hélices au plus haut.
coté plan tout est fait, la découpe doit se faire cette semaine, les moteurs arrivent aussi, la construction va commencé, je joins une image 3D du projet, les avis seront les bienvenues.