Passé 3 mètres on ne voit plus grand chose avec une GoPro de toute façon.
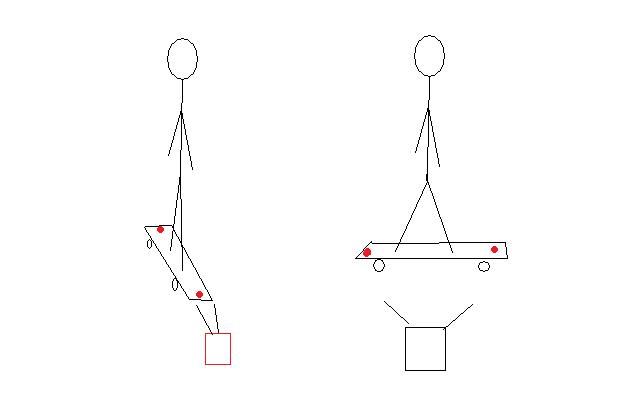
Mais cette idée d'avoir des émetteurs IR sur la planches avec les récepteurs sur le robot pour avoir une idée de la distance (en fonction de l'écartement?) et de la direction (d'où l'idée des capteurs en V).
De lui rajouter un émetteur/récepteur US pour éviter les obstacles en cas de chute ou simplement de sortie de route du robot.
Après je ne sais pas du tout comment il faut coder ce genre de détection en Arduino mais ça doit pas être monstrueux non plus.
Pour la direction je pense que 5 suffiront:
- Full gauche
- Mi gauche
- Centrée
- Mi droite
- Full droite
- Trop loin -> augmentation linéaire
- Trop proche -> réduction exponentielle
- Sinon -> vitesse constante.