Salut

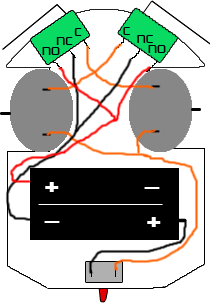
Sur le schéma (un peu fouillis il est vrai) on voit que l'interrupteur général (en bas) est directement reilé à la pile. C'est pour pouvoir allumer ou éteindre facilement ton cocotix (plus facilement que d'enlever les piles, par exemple).
ensuite, les moteurs. Ils sont directement reliés à la pile lorsque l'interrupeur est fermé (et donc laisse passer le courant).
Mais il ne faudrait pas que les moteurs tournent en permanence. C'est pourquoi il y a les interrupeurs en haut. Ce type d'interrupeur possède plusieurs états : un quand il est ouvert et un quand il est
tout bleu fermé.
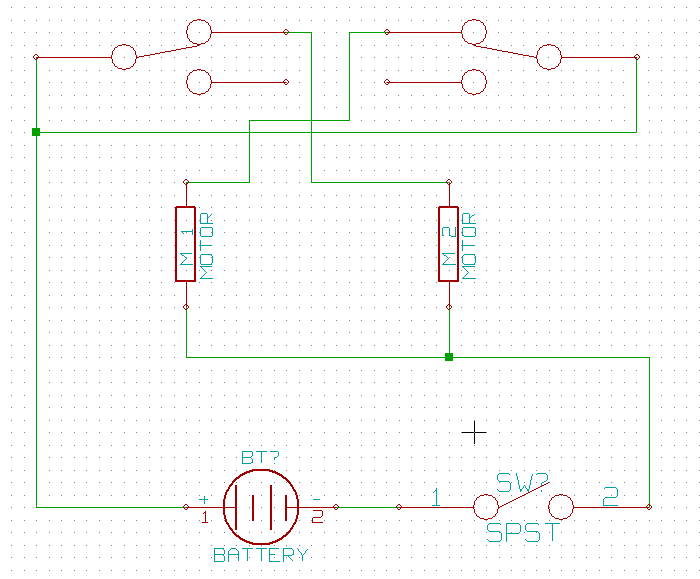
Sur chaque interrupteur il y a 3 bornes : la borne NC, normalement fermée, ce qui signifie que le courant passe par cette borne lorsque l'interrupteur est fermé ; la borne NO, normalement ouverte, est le contraire NC : le courant passe uniquement si l'interrupteur est ouvert ; et enfin la borne C, qui sert à la tension.
D'après le schéma, chaque moteur tourne si son interrupteur correspondant est ouvert (non activé).
Ton robot aura donc ce comportement : si une de ses "moustaches" touche un obstacle, le courant ne passe plus dans le moteur de l'autre côté (les fils étant croisés), et donc le robot tourne vers une autre direction.
Je te ferai volontiers des schémas plus simples ce week end, si tu veux
Skeep