Voila, comme évoqué dans ma présentation, je me suis lancé dans la création d'un robot autonome piloté par un arduino uno et dont l'IA (développée en Java) se trouve sur un UMPC connecté à l'arduino en serial mode.
J'aurais besoin de votre aide afin de valider la partie électronique, donc châssis/motorisation de mon projet.
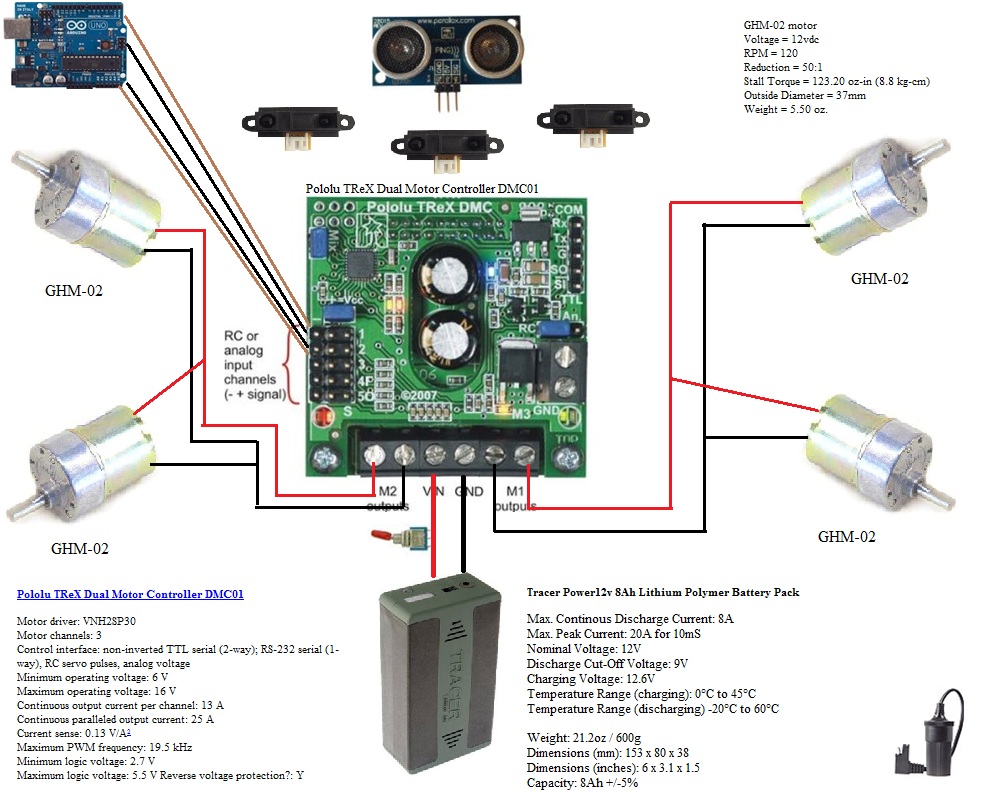
J'ai réalisé un petit croquis avec les specs des différents éléments.
J'ai quelques petites questions vis à vis de chacun des éléments:
- Moteurs: Le châssis sera un lynxmotion terminator (http://www.lynxmotion.com/p-41-terminator-sumo-kit-no-electronics.aspx) donc livré avec 4 moteurs 12V, 120RPM, 50:1. Sachant que le robot pèsera au total approximativement 2.2Kg (900g châssis terminator + 600g batterie + 436g viliv s5 + 250g délectronique + marge) les moteurs vous semblent t'il bien proportionnés pour mon projet?
- Moteurs: Sur la spec des moteurs (http://www.lynxmotion.com/images/data/ghm02.pdf) il est indiqué: The gear motor is not intended for instant reverse. The gear motor must be stopped before reversing. Cela posera t-il problème pour mon projet (déplacement simple du robot et éviter les obstacles) ?
- Contrôleur moteur Pololu Trex: Ce contrôleur vous semble t-il bien adapté à mon projet ?
- Contrôleur moteur Pololu Trex: S'agit-il bien d'un contrôleur de vitesse, donc pas besoin d'encodeur ? (je pense que oui mais j'aimerais être sûr)
- Contrôleur moteur Pololu Trex: Puis-je coupler les moteurs d'un même coté sur la même sortie? (je pense que oui vu quun côté fonctionnera de la même manière pour avancer, reculer ou tourner)
- Contrôleur moteur Pololu Trex: Pourrais-je bien le piloter depuis l'arduino? Si j'ai bien compris, pour une sortie moteur on relie un fils sur le ground de l'arduino et l'autre sur une pin PWM. Par contre, je n'ai pas bien compris comment faire pour inverser les moteurs?
- Batterie: La batterie vous semble t-elle bien dimensionnée pour mon projet? Il est indiqué qu'elle dure 50 min avec une lampe de 100w. Combien durera-t-elle sur mon robot?
- Batterie: Est-il dangereux d'utiliser une batterie LIPO pour mon projet? J'ai cru lire que ce genre de batterie pouvait facilement prendre feux... je ne suis pas forcement rassuré. Cela peut-il poser problème si le robot se retrouve bloqué (roues bloquées) ?
- Batterie: Sachant que j'ai 4 moteurs de 12v, cette batterie 12V est-elle bien adaptée?
Voila pour les questions

Sinon pour information, je pense réutiliser la connectique de l'adaptateur lumière fourni avec la batterie (voir image en bas à droite) pour le connecter au contrôleur. Mais aussi rajouter un interrupteur pour pouvoir couper le tout.
Nhésitez pas à me donner vos remarques et/ou critiques afin d'améliorer mon projet...
Merci beaucoup!