
Bonjour,
Mon projet de fin d'étude d'école d'ingé consiste à réaliser un robot pour nettoyer notre halle de technologie des copeaux de bois. C'est une école d'ingé spécialisée dans le bois et pas dans la robotique. Je n'ai aucune connaissance dans ce domaine et le prof qui a demandé ce pfe n'a certainement pas réalisé tout ce que cela demandait. Je parcours le web a la recherche de tutos que je pourrais compiler pour faire mon robot mais j'avoue ne pas vraiment m'en sortir. Voici le projet + mini cahier des charges.
concevoir de A à Z un robot aspirant
robot mobile (je pensais partir sur un châssis simple avec 2 servomoteurs de chaque côté)
autonome en énergie (va se recharger tout seul sur son dock)
détecte les copeaux (je pensais à un lidar ou une caméra au plafond)
La zone à nettoyer est de 12x7m, parfaitement plane (résine) et sans obstacle
Le budget n'est pas encore fixé mais je pense pouvoir allé jusqu'a 200€ (je confirmerai par la suite)
Je n'ai que 2 mois pour réaliser le robot et le faire marcher convenablement. J'ai une bonne idée d'à quoi va ressembler mon robot mais les questions c'est : comment le réaliser, où acheter les pièces, que commander ? et par la suite, comment programmer ça.
Je partagerai toute l'évolution de mon projet jusqu'au robot final. J'espère que vous serez m'aider.
A bientôt

15 réponses à ce sujet
#2

F6FCO
-

- Membres
-

- 186 messages
Membre occasionnel
Posté 25 novembre 2012 - 10:46
Aucun obstacle, donc un robot pour aspirer des copeaux dans une pièce vide ?
Sans vouloir te décourager pour 200€ ça risque de ne pas le faire car si tu dois lui caser un aspirateur sur le dos il va être lourd et il va falloir faire dans du robuste.
J'ai moi-même un atelier d’ébénisterie et je connais bien le problème d'aspiration des copeaux. Les copeaux de bois prennent beaucoup de volume, mon aspirateur de copeaux à un sac de 200litres, sans compter l'équivalent pour le sac à air, ça fait gros pour un robot.
Voici des photos d'aspirateurs à copeaux:
https://www.google.f...iw=1280&bih=915
Si tu utilises un simple aspirateur domestique le sac sera plein au bout de 20 secondes et tu n'auras pratiquement rien aspiré. Tu devrais revoir le sujet avec ta prof avant de te lancer.
Sans vouloir te décourager pour 200€ ça risque de ne pas le faire car si tu dois lui caser un aspirateur sur le dos il va être lourd et il va falloir faire dans du robuste.
J'ai moi-même un atelier d’ébénisterie et je connais bien le problème d'aspiration des copeaux. Les copeaux de bois prennent beaucoup de volume, mon aspirateur de copeaux à un sac de 200litres, sans compter l'équivalent pour le sac à air, ça fait gros pour un robot.
Voici des photos d'aspirateurs à copeaux:
https://www.google.f...iw=1280&bih=915
Si tu utilises un simple aspirateur domestique le sac sera plein au bout de 20 secondes et tu n'auras pratiquement rien aspiré. Tu devrais revoir le sujet avec ta prof avant de te lancer.
#3
ArthurB
-
- Membres
- 7 messages
Nouveau membre
Posté 25 novembre 2012 - 10:51
Le robot grandeur nature doit avoir une cuve de 1000L, je ne me penche que sur la réalisation d'un prototype à l'échelle réduite. En fait c'est un robot qui doit nettoyer une zone d'une machine 5axes postée sur des rails, ça usine en hauteur sans toucher le sol. La surface a nettoyer est interdite au public il n'y a donc vraiment aucun obstacle (les copeaux viennent d'en haut)
#4
Black Templar
-

- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 25 novembre 2012 - 10:58
Salut et bienvenue à toi !
En effet, vu ton cahier des charge, c'est plus un projet de fin d'étude d'école d'ingé robotique ^^
Pour ça, j'ai confectionné une turbine un peu comme ça

Le principe : la turbine tourne. L'air est aspiré par les côtés et ressort par le trou central. Il suffit de mettre ta turbine dans un carter (en bois par exemple) pour avoir une pompe à air (en soufflerie ou aspiration).
Pour le moteur, j'utilise un moteur brushless. Je compte faire tourné la turbine (10cm de diamètre) à environ 10000tr/min. Normalement, j'aurais une pression de l'ordre de la dizaine de cm d'eau (environ , mais je ne sais pas ce que ça fait réellement niveau pression, est-ce que c'est assez pour aspirer des copeaux ? ...)
Autre solution : tu récupères l'électronique d'un aspirateur... Mais ton budget explose ! (à moins que tu fasses les encombrants et que tu ai de la chance)

Pour la localisation, tu peux utiliser des roues codeuses pour connaitre le nombre de tours de roues que tu as fait (à gauche et à droite) et ainsi calculer ta position (pour peu que tu ne dérape pas sur les copeaux !)
Pour la caméra, ça veut dire un bon éclairage et surtout, du traitement d'image pour détecter les copeaux... Pas trivial non plus.
A mon avis, le plus simple, c'est encore de passer l'aspiro partout sans savoir s'il y a des copeaux ou non.
Notamment pour le dock de rechargement et le parcours de nettoyage, si la vue est dégagé, plutôt que de te localiser avec des roues codeuses, tu peux mettre des balises infrarouges et triangulariser ta position !
Au passage, vu que tu fais des études dans le bois, j'aurais une petite question pour toi
J'aimerai réaliser un carter pour ma turbine un peu dans ce style :

Est-ce que tu sais comment réaliser ce genre de pièce ? Il faut du bois spécial pour le plier comme ça ? (surtout que la turbine ne fait qu'environ 10cm de diamètre)
++
Black Templar
Mon projet de fin d'étude d'école d'ingé consiste à réaliser un robot pour nettoyer notre halle de technologie des copeaux de bois. C'est une école d'ingé spécialisée dans le bois et pas dans la robotique. Je n'ai aucune connaissance dans ce domaine et le prof qui a demandé ce pfe n'a certainement pas réalisé tout ce que cela demandait. Je parcours le web a la recherche de tutos que je pourrais compiler pour faire mon robot mais j'avoue ne pas vraiment m'en sortir. Voici le projet + mini cahier des charges.
En effet, vu ton cahier des charge, c'est plus un projet de fin d'étude d'école d'ingé robotique ^^
Pour cette partie là, je suis justement en train de concevoir non pas un aspirateur, mais une soufflerie.concevoir de A à Z un robot aspirant
Pour ça, j'ai confectionné une turbine un peu comme ça
Le principe : la turbine tourne. L'air est aspiré par les côtés et ressort par le trou central. Il suffit de mettre ta turbine dans un carter (en bois par exemple) pour avoir une pompe à air (en soufflerie ou aspiration).
Pour le moteur, j'utilise un moteur brushless. Je compte faire tourné la turbine (10cm de diamètre) à environ 10000tr/min. Normalement, j'aurais une pression de l'ordre de la dizaine de cm d'eau (environ , mais je ne sais pas ce que ça fait réellement niveau pression, est-ce que c'est assez pour aspirer des copeaux ? ...)
Autre solution : tu récupères l'électronique d'un aspirateur... Mais ton budget explose ! (à moins que tu fasses les encombrants et que tu ai de la chance)
Deux servomoteurs débridés alors. Ou sinon, deux moto-réducteurs à courant continue, ça marche aussi.robot mobile (je pensais partir sur un châssis simple avec 2 servomoteurs de chaque côté)
Ce qui veut dire que le robot devra pouvoir se localiser et interpréter son environnement. Et là, les emmerdes commencentautonome en énergie (va se recharger tout seul sur son dock)
Pour la localisation, tu peux utiliser des roues codeuses pour connaitre le nombre de tours de roues que tu as fait (à gauche et à droite) et ainsi calculer ta position (pour peu que tu ne dérape pas sur les copeaux !)
Et là aussi, ça va être lol. Le lidar, à mon avis, c'est absolument pas assez précis pour détecter des copeaux de bois... Et puis le lidar à lui seul explose complétement le budget.détecte les copeaux (je pensais à un lidar ou une caméra au plafond)
Pour la caméra, ça veut dire un bon éclairage et surtout, du traitement d'image pour détecter les copeaux... Pas trivial non plus.
A mon avis, le plus simple, c'est encore de passer l'aspiro partout sans savoir s'il y a des copeaux ou non.
ça, c'est un très bon point.La zone à nettoyer est de 12x7m, parfaitement plane (résine) et sans obstacle
Notamment pour le dock de rechargement et le parcours de nettoyage, si la vue est dégagé, plutôt que de te localiser avec des roues codeuses, tu peux mettre des balises infrarouges et triangulariser ta position !
C'est chaud ça... A moins de faire de la récup, rien que les pièces mécaniques, ça coute bonbon !Le budget n'est pas encore fixé mais je pense pouvoir allé jusqu'a 200 (je confirmerai par la suite)
ça aussi c'est chaud. Voir clairement infaisable en l'état. A mon avis, il va falloir simplifier ton problème au maximum !Je n'ai que 2 mois pour réaliser le robot et le faire marcher convenablement.
Au passage, vu que tu fais des études dans le bois, j'aurais une petite question pour toi
J'aimerai réaliser un carter pour ma turbine un peu dans ce style :
Est-ce que tu sais comment réaliser ce genre de pièce ? Il faut du bois spécial pour le plier comme ça ? (surtout que la turbine ne fait qu'environ 10cm de diamètre)
++
Black Templar
Mon site internet : http://ferdinandpiette.com/
#5
ArthurB
-
- Membres
- 7 messages
Nouveau membre
Posté 25 novembre 2012 - 11:24
Merci pour ces premiers avis.
En fait il y a deux projets distincts si on peut dire, d'un côté la proposition de solutions pour le robot taille réelle et étude des coûts et de l'autre réalisation d'un prototype simplifié (c'est surtout pour lui que je suis là)
Je pense me passer du système de détection / balisage pour le prototype car comme tu le dis, je me rends bien compte que tout n'est pas faisable. Il faut quand même que je lui propose des solutions. Pour le proto tout est réduit. Il me faut juste une petite cuve et une turbine que je pourrais enclenché au moment où je veux. Pour la démonstration lors de la soutenance je pensais donner les coordonnées au robot auparavant, l'aspiration ne se lancerai que lorsqu'il serait dessus.
Pour la détection je pensais à caméra + flash, la surface est parfaitement noir et utiliser un algorithme à détection de texture ou de contour mais je sais pas où je peux trouver ça.
L'odométrie étant imprécise je pensais effectivement à un balisage ou alors une détection du robot par la caméra au plafond.
Pour ton carter tu peux utiliser différents bois, sur ton exemple on dirait qu'il a utilisé du HDF. La technique consiste à prendre plusieurs lamelles (sur ton exemple 3) qui seront donc plus flexible, il faut les maintenir dans un gabarit pendant que la colle fait son effet (c'est elle qui maintiendra le cintrage). Tu sembles avoir un gros rayon de courbure sur une petite pièce il faudra peut être malléabilisé le bois avant (trempe dans de l'eau bouillante) et prendre des très petites lamelles. La technique s'appelle le cintrage par lamellé collé (c'est utilisé surtout pour les grandes charpentes)
En fait il y a deux projets distincts si on peut dire, d'un côté la proposition de solutions pour le robot taille réelle et étude des coûts et de l'autre réalisation d'un prototype simplifié (c'est surtout pour lui que je suis là)
Je pense me passer du système de détection / balisage pour le prototype car comme tu le dis, je me rends bien compte que tout n'est pas faisable. Il faut quand même que je lui propose des solutions. Pour le proto tout est réduit. Il me faut juste une petite cuve et une turbine que je pourrais enclenché au moment où je veux. Pour la démonstration lors de la soutenance je pensais donner les coordonnées au robot auparavant, l'aspiration ne se lancerai que lorsqu'il serait dessus.
Pour la détection je pensais à caméra + flash, la surface est parfaitement noir et utiliser un algorithme à détection de texture ou de contour mais je sais pas où je peux trouver ça.
L'odométrie étant imprécise je pensais effectivement à un balisage ou alors une détection du robot par la caméra au plafond.
Pour ton carter tu peux utiliser différents bois, sur ton exemple on dirait qu'il a utilisé du HDF. La technique consiste à prendre plusieurs lamelles (sur ton exemple 3) qui seront donc plus flexible, il faut les maintenir dans un gabarit pendant que la colle fait son effet (c'est elle qui maintiendra le cintrage). Tu sembles avoir un gros rayon de courbure sur une petite pièce il faudra peut être malléabilisé le bois avant (trempe dans de l'eau bouillante) et prendre des très petites lamelles. La technique s'appelle le cintrage par lamellé collé (c'est utilisé surtout pour les grandes charpentes)
#6
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 25 novembre 2012 - 11:36
Pour la détection de contours, tu as tout ce qu'il te faut ici : http://xphilipp.developpez.com/articles/filtres/Pour la détection je pensais à caméra + flash, la surface est parfaitement noir et utiliser un algorithme à détection de texture ou de contour mais je sais pas où je peux trouver ça.
L'important étant de bien comprendre le principe de la convolution matricielle sur une image (c'est une méthode simple et puissance).
Un simple filtre de détection de contours (Sobel & co) ne suffira pas. Il te faudra aussi ensuite binariser ton image (et donc choisir un seuil) pour que tu puisses dire : oui à ce pixel, il y a des copeaux, ou non il n'y en as pas.
Si tu as une caméra au plafond, alors oui, tu peux te passer du balisage. ça fera ça de moins dans le projet. Par contre, tu va devoir rajouter un algorithme de détection du robot. On peut surement faire des choses assez adhoc et pas trop dure dans ton cas.L'odométrie étant imprécise je pensais effectivement à un balisage ou alors une détection du robot par la caméra au plafond.
Qui dit caméra, dit PC pour faire tourner les algos. A mon avis, dans ton cas, il va être difficile de tout faire en embarqué. (pas le temps)
Autre chose : sais-tu programmer et dans quelle langage ? Car si c'est non, ça risque d'être juste infaisable. Se former à la programmation et faire du traitement d'image en 2 mois de temps, c'est mission impossible (sauf si tu fais du copier/coller de code sans comprendre)...
Si t'as des bases par contre, c'est jouable.
Oh ! C'est vrai, le bois mouillé se déforme bien !Pour ton carter tu peux utiliser différents bois, sur ton exemple on dirait qu'il a utilisé du HDF. La technique consiste à prendre plusieurs lamelles (sur ton exemple 3) qui seront donc plus flexible, il faut les maintenir dans un gabarit pendant que la colle fait son effet (c'est elle qui maintiendra le cintrage). Tu sembles avoir un gros rayon de courbure sur une petite pièce il faudra peut être malléabilisé le bois avant (trempe dans de l'eau bouillante) et prendre des très petites lamelles. La technique s'appelle le cintrage par lamellé collé (c'est utilisé surtout pour les grandes charpentes)

Je vais essayer ta technique, merci beaucoup.
Mon site internet : http://ferdinandpiette.com/
#7
ArthurB
-
- Membres
- 7 messages
Nouveau membre
Posté 25 novembre 2012 - 12:24
Merci pour le lien. Je n'ai pas vraiment de base en programmation mais mes études m'ont formé à être logique (si on peut dire ^^) et j'ai construit mon site en xhtml, css, j'ai utilisé matlab, vba pour réaliser quelques petit programme simple aussi donc je pense que, même si il ne s'agit pas de tout réinventer, c'est testable de reprendre quelques algos existant et d'adapter. Apprendre un langage c'est long mais arriver à le comprendre dans les grandes lignes beaucoup moins en général.
#8
F6FCO
-
- Membres
-
- 186 messages
Membre occasionnel
Posté 25 novembre 2012 - 12:52
ArthurB je n'avais pas compris que tu faisais un modèle réduit, évidemment ça change tout.
Black Templar je peux amener un peu d'eau à ton moulin sans vraiment apporter des réponses précises, juste des constatations:
pour ton projet de soufflerie le diamètre du tuyau d'entrée (aspirateur) ou sortie si c'est un souffleur est très critique sur le rendement. Par exemple sur mon aspirateur à copeaux d'atelier le diamètre du tuyau est de 100mm de diamètre. J'ai voulu lui adjoindre une réduction et y adapter un tuyau d'aspirateur domestique pour ma fraiseuse et il n'aspirait pratiquement plus rien. Tout cela doit se calculer mais c'est hors de mes compétences.
Pour ton carter j'ai aussi l'expérience du bois lamellé-collé, j'ai bricolé pas mal en archerie traditionnelle pendant longtemps. Tu peux réaliser facilement ton carter soit en contreplaqué, soit en isorel, les deux matériaux se trouvent facilement en GSB. Le fond en épais, disons 10mm et le tour du carter en bandes de 3mm travaillées comme le dit ArthurB: Réaliser un montage de collage, mais attention, les colles blanches à bois n'aiment pas l'eau, donc mettre tes feuilles de bois en forme sur le montage en les mouillant préalablement, tu peux les aider à prendre la forme en les chauffant avec un décapeur thermique et tu les laisses sécher en place.
C'est seulement une fois qu'elles seront parfaitement sèches et formées que tu pourras les coller avec des serre-joints sur toute la périphérie si tu veux faire du bon travail.
Black Templar je peux amener un peu d'eau à ton moulin sans vraiment apporter des réponses précises, juste des constatations:
pour ton projet de soufflerie le diamètre du tuyau d'entrée (aspirateur) ou sortie si c'est un souffleur est très critique sur le rendement. Par exemple sur mon aspirateur à copeaux d'atelier le diamètre du tuyau est de 100mm de diamètre. J'ai voulu lui adjoindre une réduction et y adapter un tuyau d'aspirateur domestique pour ma fraiseuse et il n'aspirait pratiquement plus rien. Tout cela doit se calculer mais c'est hors de mes compétences.
Pour ton carter j'ai aussi l'expérience du bois lamellé-collé, j'ai bricolé pas mal en archerie traditionnelle pendant longtemps. Tu peux réaliser facilement ton carter soit en contreplaqué, soit en isorel, les deux matériaux se trouvent facilement en GSB. Le fond en épais, disons 10mm et le tour du carter en bandes de 3mm travaillées comme le dit ArthurB: Réaliser un montage de collage, mais attention, les colles blanches à bois n'aiment pas l'eau, donc mettre tes feuilles de bois en forme sur le montage en les mouillant préalablement, tu peux les aider à prendre la forme en les chauffant avec un décapeur thermique et tu les laisses sécher en place.
C'est seulement une fois qu'elles seront parfaitement sèches et formées que tu pourras les coller avec des serre-joints sur toute la périphérie si tu veux faire du bon travail.
#10
F6FCO
-
- Membres
-
- 186 messages
Membre occasionnel
Posté 25 novembre 2012 - 06:22
Il y a cent façons de faire ce genre de chose, Black Templar t'as déja donné des pistes et je pense que chaque membre du forum aura une solution différente valable plus ou moins compliquée à te proposer.
Posons le problème:
- La salle est complètement vide -> ça simplifie bcp le travail
- Ton robot doit faire toujours le même travail, encore et encore... (Aspirer des copeaux et c'est tout !)
Pour ma part je monterais un arduino sur un chassis à 3 roues. Deux roues motorisées à l'arrière et une roue folle à l'avant.
Je peindrais une spirale blanche sur le sol pour lui indiquer le chemin à parcourir et je monterai un module de suivi de ligne sur l'arduino
http://dx.com/p/arduino-line-hunting-sensor-module-118057
Mais il va falloir que tu apprennes un peu la programmation sur arduino (pas trop compliqué) pour faire çà.
Sinon une solution plus simpliste mais qui est viable: tu détournes le hard d'un jouet comme celui-ci pour l'installer sur ta maquette et convaincre ta prof:
http://dx.com/p/multi-function-line-tracking-robot-car-kits-for-arduino-156156
Posons le problème:
- La salle est complètement vide -> ça simplifie bcp le travail
- Ton robot doit faire toujours le même travail, encore et encore... (Aspirer des copeaux et c'est tout !)
Pour ma part je monterais un arduino sur un chassis à 3 roues. Deux roues motorisées à l'arrière et une roue folle à l'avant.
Je peindrais une spirale blanche sur le sol pour lui indiquer le chemin à parcourir et je monterai un module de suivi de ligne sur l'arduino
http://dx.com/p/arduino-line-hunting-sensor-module-118057
Mais il va falloir que tu apprennes un peu la programmation sur arduino (pas trop compliqué) pour faire çà.
Sinon une solution plus simpliste mais qui est viable: tu détournes le hard d'un jouet comme celui-ci pour l'installer sur ta maquette et convaincre ta prof:
http://dx.com/p/multi-function-line-tracking-robot-car-kits-for-arduino-156156
#11
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 25 novembre 2012 - 06:59
Pour ma part je monterais un arduino sur un chassis à 3 roues. Deux roues motorisées à l'arrière et une roue folle à l'avant.
Je peindrais une spirale blanche sur le sol pour lui indiquer le chemin à parcourir et je monterai un module de suivi de ligne sur l'arduino
http://dx.com/p/ardu...r-module-118057
Oh, je plussoie !
ça éliminerai la caméra et les algo de traitement vidéo
Comme quoi, au final, un simple robot suiveur de ligne, ça peut être utile (même si pas très original) ^^
Il faut juste que le capteur soit après le module d'aspiration car si la ligne est recouverte de copeaux, ça va bien moins marcher
Mon site internet : http://ferdinandpiette.com/
#13
Melmet
-

- Modérateur
-
- 1â¯527 messages
Membre chevronné
- Gender:Male
Posté 26 novembre 2012 - 09:51
Salut,
Bon j'ai survoler ton sujet. Le système d'aspiration, je vous le laisse. Je voulais juste te dire que tu peux ajouter un système de 2 brosses rotatives juste devant l'aspiration, Les deux doivent tourner pour envoyer les copeaux vers le centre de la machine.(une qui tourne vers lintérieur et l'autre dans le sens inverse mais toujours vers lintérieur)
@ Black Templar: c'est donc ça ta turbine , Pas mal ton proto
, Pas mal ton proto 
Bon j'ai survoler ton sujet. Le système d'aspiration, je vous le laisse. Je voulais juste te dire que tu peux ajouter un système de 2 brosses rotatives juste devant l'aspiration, Les deux doivent tourner pour envoyer les copeaux vers le centre de la machine.(une qui tourne vers lintérieur et l'autre dans le sens inverse mais toujours vers lintérieur)
@ Black Templar: c'est donc ça ta turbine
, Pas mal ton proto
#14
hmnrobots
-

- Membres
-
- 316 messages
Habitué
- Gender:Male
- Location:Périphérie Nantes
Posté 27 novembre 2012 - 11:51
Il y a cent façons de faire ce genre de chose, Black Templar t'as déja donné des pistes et je pense que chaque membre du forum aura une solution différente valable plus ou moins compliquée à te proposer.
Posons le problème:
- La salle est complètement vide -> ça simplifie bcp le travail
- Ton robot doit faire toujours le même travail, encore et encore... (Aspirer des copeaux et c'est tout !)
Pour ma part je monterais un arduino sur un chassis à 3 roues. Deux roues motorisées à l'arrière et une roue folle à l'avant.
Je peindrais une spirale blanche sur le sol pour lui indiquer le chemin à parcourir et je monterai un module de suivi de ligne sur l'arduino
http://dx.com/p/arduino-line-hunting-sensor-module-118057
Mais il va falloir que tu apprennes un peu la programmation sur arduino (pas trop compliqué) pour faire çà.
Sinon une solution plus simpliste mais qui est viable: tu détournes le hard d'un jouet comme celui-ci pour l'installer sur ta maquette et convaincre ta prof:
http://dx.com/p/multi-function-line-tracking-robot-car-kits-for-arduino-156156
Dans le même esprit et pour éviter les poussières, dans les ateliers les chariots filoguidés sont pas mal utilisés, une étude complète est dispo içi
Faire simple, c'est déjà bien assez compliqué!
http://hmnrobots.blogspot.fr/
http://hmnrobots.blogspot.fr/
#15
skyhack
-

- Membres
-
- 885 messages
Membre passionné
- Gender:Male
- Location:Racourt et Flaba (08)
- Interests:Synthé, modélisation mécanique, bricolage divers, VTT enduro
Posté 27 novembre 2012 - 02:19
@ Black Templar
Par contre je pense sérieusement que s'amuser à créer un algorithme de recherche de copeaux serait vraiment une perte de temps. A quoi bon voir les copeaux si on peut les ramasser d'un coup !
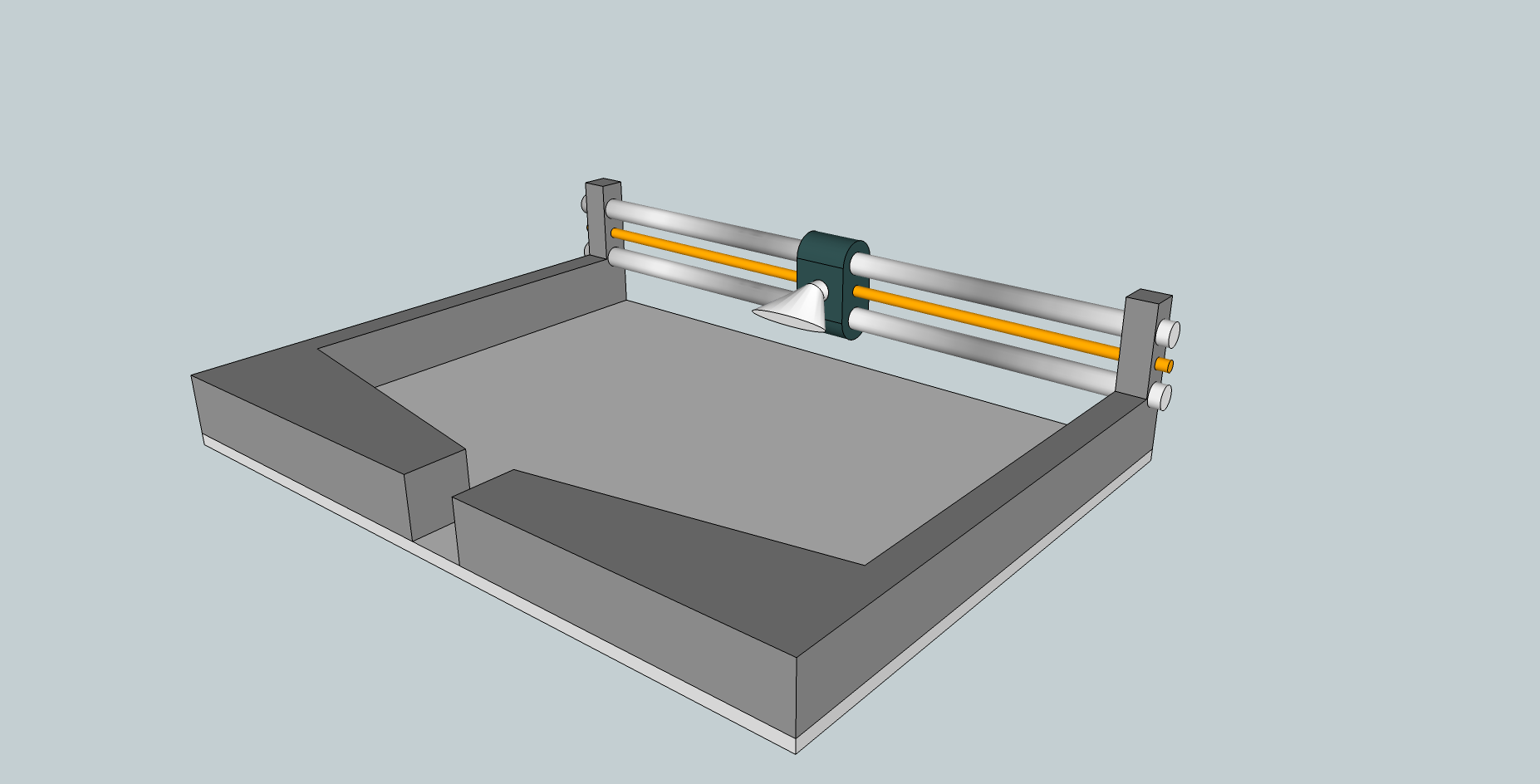
En bref le robot serait en fait juste une souffleuse ! le robot souffle sur le sol en se déplaçant sur un rail de droite à gauche en direction du bout de la zone en forme d'entonnoir et le tour est joué !
Enfin c'est une idée mais vu le but du robot, plus c'est simple et mieux ce sera !
skyhack.
Par contre je pense sérieusement que s'amuser à créer un algorithme de recherche de copeaux serait vraiment une perte de temps. A quoi bon voir les copeaux si on peut les ramasser d'un coup !
En bref le robot serait en fait juste une souffleuse ! le robot souffle sur le sol en se déplaçant sur un rail de droite à gauche en direction du bout de la zone en forme d'entonnoir et le tour est joué !
Enfin c'est une idée mais vu le but du robot, plus c'est simple et mieux ce sera !
skyhack.
" Monsters are real. Ghosts are real too.
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------


Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users

