
Bonjour je suis en plein montage du robot Roby (j'ai galéré pas mal de temps pour avoir toutes les pièces). Sur le tuto http://www.robot-maker.com/forum/tutorials/article/10-roby/ à la partie "Test des moteurs" il est dit de "Remplacez les valeurs 86 et 84 respectivement par les valeurs du neutre que vous trouvez pour le servomoteur gauche et pour le servomoteur droit de votre robot" et je ne vois pas à quoi cela correspond même en regardant la fiche technique des servomoteurs.
Pouvez vous m'aider svp?
EDIT : Aussi je voulais savoir si vous pouviez m'indiquer comment faire des schémas de cablage du type de ceux qui sont sur le tuto

17 réponses à ce sujet
#2

Mike118
-

- Administrateur
-

- 9â¯977 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 09 février 2013 - 05:02
Bonjour je suis en plein montage du robot Roby (j'ai galéré pas mal de temps pour avoir toutes les pièces). Sur le tuto http://www.robot-maker.com/forum/tutorials/article/10-roby/ à la partie "Test des moteurs" il est dit de "Remplacez les valeurs 86 et 84 respectivement par les valeurs du neutre que vous trouvez pour le servomoteur gauche et pour le servomoteur droit de votre robot" et je ne vois pas à quoi cela correspond même en regardant la fiche technique des servomoteurs.
Pouvez vous m'aider svp?
En fait il faut que tu trouve pour quelle valeur tes servo moteurs seront à l'arrêt... En effet cela varie grandement entre deux servo différents et cela peut légèrement varier pour deux servo identique.
En gros c'est pour te rappeler qu'il faut que tu étalonne ta consigne en fonction de tes moteurs à toi .
Aussi je voulais savoir si vous pouviez m'indiquer comment faire des schémas de cablage du type de ceux qui sont sur le tuto
Je te répons " Fritzing " Et je te laisse te faire aider par notre amis google
 Je suis sur que tu t'en sortiras, c'est assez intuitif =)
Je suis sur que tu t'en sortiras, c'est assez intuitif =) Par contre si tu ne trouves vraiment pas n'hésite pas à demander plus d'information !
Par contre la prochaine fois : au lieu de mettre deux messages à la suite : Modifie le premier et ajoute le nouveau contenu ! ( Ce coup ci je le fais pour toi
) à bientôt !
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#3
blues1360
-
- Membres
- 23 messages
Membre
Posté 10 février 2013 - 06:59
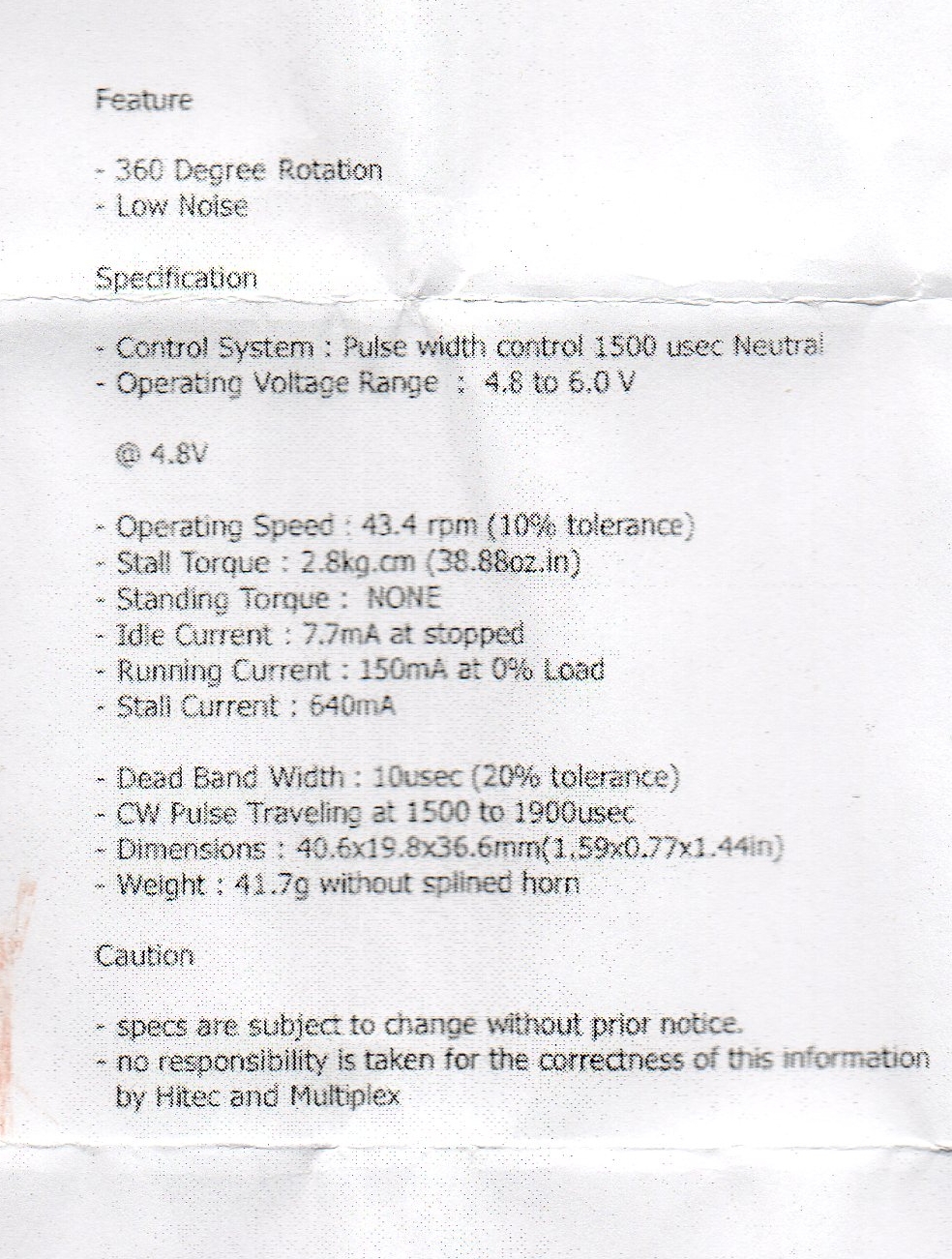
Ah d'accord désolé pour le double message et merci. "En fait il faut que tu trouve pour quelle valeur tes servo moteurs seront à l'arrêt", oui mais comment ? C'est ce qu'ils appellent le "Idle Current" ? Je joins une photo de la doc. J'ai trouvé Fritzing il a pas l'air compliqué d'utilisation merci beaucoup .
Image(s) jointe(s)
#4
Mike118
-
- Administrateur
-
- 9â¯977 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 11 février 2013 - 08:55
"En fait il faut que tu trouve pour quelle valeur tes servo moteurs seront à l'arrêt", oui mais comment ?
en testant ! Tu n'as pas le choix et en plus faut le faire pour chaque servo. C'est ce qu'on appel étalonner !
Bonne continuation
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#5
blues1360
-
- Membres
- 23 messages
Membre
Posté 11 février 2013 - 02:35
Franchement j'ai pas envie d'etre chiant mais comment ?? On teste quoi comment?
#6
Mike118
-
- Administrateur
-
- 9â¯977 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 12 février 2013 - 12:42
Excuse moi,
Je reprend .
Il faut que tu fasses un programme qui contrôle ton servo mais programme qui teste uniquement ton servo... Dans ton programmes tu auras des variables qu'il va falloir modifier pour que cela corresponde au plage de fonctionnement de ton servo...
Rappel en théorie, pour contrôler un servomoteur il faut envoyer un signal particulier :un temps haut compris entre 0,9ms et 2,1ms pour une periode de 20ms... mais ça c'est la théorie... ça varie un peu en fonction de chaques servo...
Toi par exemple faudra envoyer un temps haut compris entre 0,8 et 2,5 ms pour avoir ta rotation de 180° ...
Ais je été clair ?
Je reprend .
Il faut que tu fasses un programme qui contrôle ton servo mais programme qui teste uniquement ton servo... Dans ton programmes tu auras des variables qu'il va falloir modifier pour que cela corresponde au plage de fonctionnement de ton servo...
Rappel en théorie, pour contrôler un servomoteur il faut envoyer un signal particulier :un temps haut compris entre 0,9ms et 2,1ms pour une periode de 20ms... mais ça c'est la théorie... ça varie un peu en fonction de chaques servo...
Toi par exemple faudra envoyer un temps haut compris entre 0,8 et 2,5 ms pour avoir ta rotation de 180° ...
Ais je été clair ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#7
blues1360
-
- Membres
- 23 messages
Membre
Posté 18 février 2013 - 11:15
Je vois ce que tu veux dire mais je n'ai aucune connaissance en programmation je ne maitrise aucun langage de programmation je ne savais pas que j'allais etre amené à faire ça. Est ce qu'il peut y avoir un dysfonctionnement si je laisse 84 et 86 ?
#8
Mike118
-
- Administrateur
-
- 9â¯977 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 19 février 2013 - 02:20
Pour commencer tu peux laisser 84 et 86 mais tu verras surement un disfonctionnement. ( robot qui ne roule pas droit etc... ) Tu ajusteras alors toi même les valeurs au pif jusqu'à ce que cela marche !
Bonne continuation !
Bonne continuation !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#9
blues1360
-
- Membres
- 23 messages
Membre
Posté 20 février 2013 - 09:15
Merci,pour relier les élements entre eux il faut utiliser du fil de cuivre avec une section particulière ou les jumper cable suffisent ? Aussi j'aurais voulu savoir si par la suite on pouvait faire suivre une ligne au robot il y a peu d'informations là dessus sur le net
#10
Gyro49
-

- Membres
-
- 246 messages
Habitué
- Gender:Male
- Location:Angers, France
Posté 21 février 2013 - 09:16
Bonjour,
Je suis presque sur le même projet.
Regarde où j'en suis -> Mon arduino
en ce qui concerne la mopdification des servomoteurs 5 minutes chrono avce le lien suivant
http://fribotte.free.fr/bdtech/pic/servoCC.html
Bonn journée
Je suis presque sur le même projet.
Regarde où j'en suis -> Mon arduino
en ce qui concerne la mopdification des servomoteurs 5 minutes chrono avce le lien suivant
http://fribotte.free.fr/bdtech/pic/servoCC.html
Bonn journée
#11
blues1360
-
- Membres
- 23 messages
Membre
Posté 23 février 2013 - 11:52
Merci, est-ce que quelqu'un pourrait me dire s'il faut utiliser du fil de cuivre avec une section particulière ou si les jumper cables suffisent
#12
ChristianR
-

- Membres
-
- 474 messages
Membre passionné
- Gender:Male
- Location:Isère (38)
Posté 23 février 2013 - 04:54
Les câbles jumpers suffisent pour de faibles courants.
Christian
#13
blues1360
-
- Membres
- 23 messages
Membre
Posté 25 février 2013 - 12:03
Merci, ça y est! Roby roule nickel, enfin me direz vous. Mais je n'ai pas encore mis les capteurs mais ça ne devrait pas poser problème. Est ce que quelqu'un peut me dire la référence des UPDD utilisés dans le tuto car ceux que je trouve sur le net ont le levier trop court (même ceux dit à levier long). Je ne trouve pas de résistance pull-down, pouvez vous me dire ou en trouver ?
#14
blues1360
-
- Membres
- 23 messages
Membre
Posté 28 février 2013 - 02:54
Svp j'ai un souci, j'ai les resistances de pull-down et les microrupteurs, j'ai fais le montage et aucune difference le robot ne detecte pas les obstacles alors j'ai retiré les resistances pour voir et là le robot detecte constemment quelque chose il avance a peine puis change de direction sans cesse. J'ai essayé avec des résistances de 1 kohm et de 10 kohm. Je pense que c'est dû à la valeur des résistances pouvez vous me donner un ordre de grandeur pour les résistances
#15
Mike118
-
- Administrateur
-
- 9â¯977 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 28 février 2013 - 05:12
Pour un pull-down,généralement j'utilise du 1K et du 10k ohm ... Vu que tu as essayé du 10K et que ça ne marche pas ... je suis pas sur que cela soit la bonne explication ...
Poste un schémas de ton montage que j'y jette un coup d'oeil =)
à bientôt !
Poste un schémas de ton montage que j'y jette un coup d'oeil =)
à bientôt !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#16
blues1360
-
- Membres
- 23 messages
Membre
Posté 28 février 2013 - 05:19
C'est exactement le meme montage que sur le tuto roby
#17
blues1360
-
- Membres
- 23 messages
Membre
Posté 25 mars 2013 - 02:30
Bonjour j'ai un gros souci subitement le robot s'est arreté de fonctionner, les piles marchent correctement. Est-ce que ça peut venir de la paltine ou des servomoteurs ?
#18
Mike118
-
- Administrateur
-
- 9â¯977 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
Posté 25 mars 2013 - 03:02
Les deux moteurs se sont arrêté ? Si oui un caple d'alimentation a du se débranché : Si ça se trouve mes masse ne sont plus reliées ! Sinon, est ce que tu arrive à reprogrammer la arduino ?Bonjour j'ai un gros souci subitement le robot s'est arreté de fonctionner, les piles marchent correctement. Est-ce que ça peut venir de la paltine ou des servomoteurs ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




