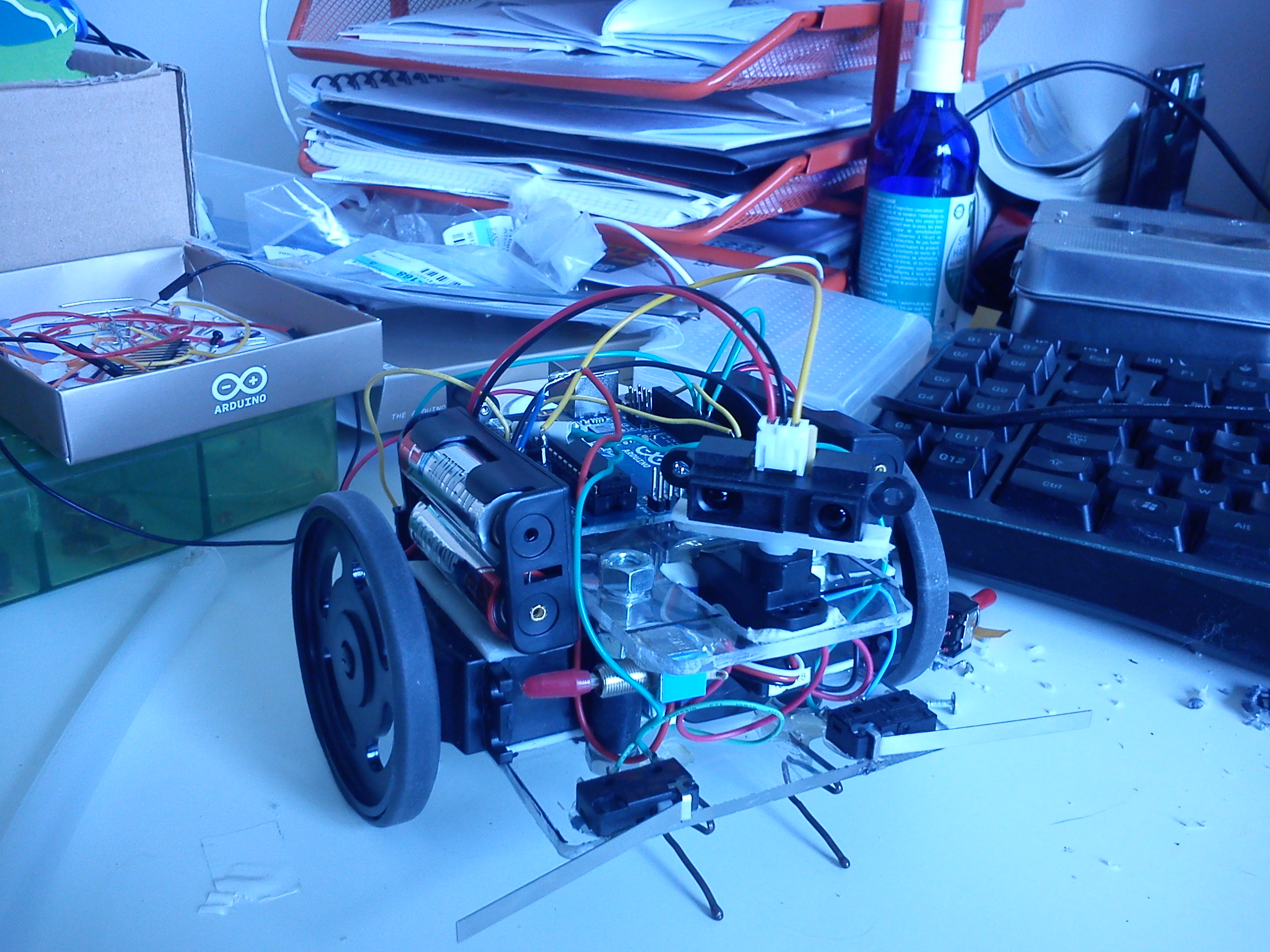
je viens vous présenter mon Robby que j'ai réalisé avec votre super tuto !
La chassie est monté sur deux étages( le 1er avec les moteurs et la platine, le 2eme avec l'adruino), il a été découper dans du plexiglas et affiner à la dremel!
le programme du tuto marche super et j'ai vraiment appris sur le langage adruino!! ( un big + à robocop)
j'ai en plus rajouté un mini-servomoteur pour faire une tête avec le capteur infrarouge!
donc la tête est branché sur le pin 8, au gnr de l'adruino, à l'alimentation des piles et fait un balayage devant le robot .
pour le mouvement j'ai rajouté ce programme à celui du tuto:
#include <Servo.h>
Servo tete;
int pos = 0;
void setup()
{
tête.attach(8);
}
void loop()
{
for(pos = 0; pos < 180; pos += 1)
{
tete.write(pos);
delay(15);
}
for(pos = 180; pos>=1; pos-=1)
{
tete.write(pos);
delay(15);
}
}
Donc tout marche bien !
Maintenant je me dis que si la tête bouge il peut prendre la décision d'aller la ou les d'obstacles sont le plus loin, je m'explique:
il roule, il détecte un obstacle en face de lui, il fait un balayage à droite et à gauche, pour voir ou il n'y a pas d'obstacle, puis il prend cette direction ... etc
vous croyez que cela est possible ? Une petite piste pour la programmation ? merci à plus tard !