
Voilà plusieurs mois que j'y réfléchissais, que je faisais des modèles et que je me renseignais sur le sujet en attendant d'avoir le budget pour me lancer. Mais ça y est, je me suis lancé !
L'objectif :
L'idée est de concevoir un hexapode qui sera muni d'un réseau de neurones artificiels afin d'apprendre seul à marcher. Marcher pour un hexapode constitue deux problèmes bien distincts :
- Réaliser le mouvement d'une jambe
- Coordonner toutes les jambes afin d'obtenir une démarche
Mon but sera dans un premier temps l'apprentissage de la démarche par l'hexapode qui possédera de base des fonctions pour déplacer les jambes. Ce ne sera pas une mince affaire mais si j'y parviens, je tenterais d'aller plus loin en implémentant également un choix de démarche. C'est à dire qu'en fonction de son environnement, l'hexapode devra choisir une vitesse (et donc une démarche) adaptée.
L’IA :
Après des mois de recherche et de cours vidéos (sur coursera) sur les réseaux de neurones, je ne suis toujours pas au point sur le sujet et la partie IA de l'hexapode est encore à l'état d'étude. J'ai développé un code générique en C++ qui me laissera beaucoup de liberté sur la structure et les fonctions des réseau que je peux créer avec. Il me reste beaucoup de questions quant à la formalisation du problème et au choix du réseau, je n'ai donc rien fait pour l'hexapode de ce côté là encore.
La méca :
L'hexapode devrait faire environs un mètre de périmètre et sera constitué de 18 servomoteurs Hitec HS-485HB avec palonnier métalliques. Le corps circulaire et les pattes seront faites de plexiglas. Seul les "hanches" (rotule entre une patte et le corps) seront réalisé à l'aide de support de servomoteurs acheté car je n'ai pas de quoi les fabriquer moi même de manière propre et précise.
L'élec :
L'alimentation et le contrôle des servos sera effectué via une carte SSC-32 qui elle même sera dans un premier temps connectée à un PC et une alimentation secteur. Quand des résultats concluants apparaîtront, j'investirais certainement dans une RaspberryPi et une batterie LiPo, mais pour le moment le pc reste le plus fiable et le plus simple pour travailler.
L'avancement :
J'ai reçu ma première commande cette semaine et j'ai usiné le corps circulaire et une jambe, j'ai également commencé à monter les servomoteurs :
Une hanche :
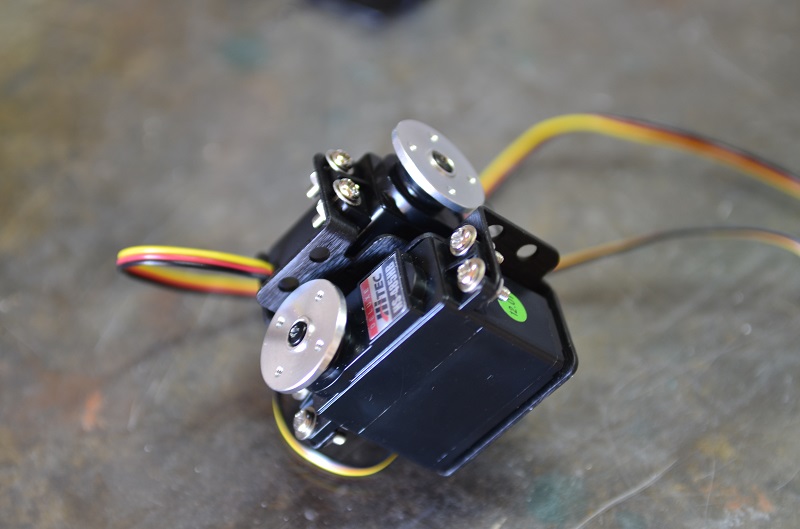
Une jambe montée sur la partie supérieur du corps :

Les élastiques permettent de tenir temporairement les câbles et les vis utilisées ne sont pas adaptées, je pensais en recevoir avec les servos mais ça n'a pas été le cas. En attendant de pouvoir acheter des vis, j'ai monté toutes les hanches et les palonniers métalliques.
Côté contrôle, j'ai commandé un câble usb-rs232 de chez Prolific que je n'ai pas réussi à faire fonctionner. Après 4H dessus, les différents os que j'utilisent (w7 64B, w7 32b, debian) détectent correctement le câble (je peux même me connecter en screen dessus) mais aucune info ne passe.
J'ai donc commandé un câble d'une autre marque (avec un chip ftdi) et j'attends de le recevoir pour pouvoir avancer.
Pour plus d'informations, voici le blog du projet


















