
Merci Chritstian. C'est effectivement beaucoup plus simple que je ne l'imaginais.
Cependant Levend a peut-être raison concernant les moteurs: il s'agit sans doute de motoréducteur puisqu'on peut voir la présence de variateurs à côté du joystick sur la vidéo. Me tromperais-je?
Pour répondre à ta question : je me suis peut-être mal exprimé en utilisant l'expression "s'arrêter à un point précis". Je voulais juste dire qu'une fois que le joystick ou télécommande est relâché, le moteur s'arrête immédiatement sans continuer sa course d'un dixième de millimètre. Un voiture téléguidée, par exemple, ne fait pas du tout cela: une fois lancée, elle continue de rouler, et pour ce qui est de la direction: elle revient à son point de départ si on lâche la commande qui désaxe les roues. Je voulais juste dire: dès qu'on lâche -> tout doit rester dans cette position.
Autre question: pour l'autre modèle (pas le pan & tilt), mais l'assistance autofocus, un servo serait-il assez "puissant"?

50 réponses à ce sujet
#22

ChristianR
-

- Membres
-

- 474 messages
Habitué
- Gender:Male
- Location:Isère (38)
- Interests:Arduino, programmation, électronique...
Posté 15 novembre 2013 - 12:52
tu disposes d'un retour vidéo pour savoir si l'image est nette ?
Christian
#23
levend
-

- Membres
-
- 5â¯642 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 15 novembre 2013 - 04:37
Pour moi, il n'y a aucun doute, ceux sont des moto-réducteursMerci Chritstian. C'est effectivement beaucoup plus simple que je ne l'imaginais.
Cependant Levend a peut-être raison concernant les moteurs: il s'agit sans doute de motoréducteur puisqu'on peut voir la présence de variateurs à côté du joystick sur la vidéo. Me tromperais-je?
Si tu étais dirctement fixer sur le moteur, il ne serait s'arrèterait pas immédiatement, mais avec le réducteur, l'arret est quasi-immédiat, et l'inertie due au poids de l'APN n'est pas génante, avec la réduction.Pour répondre à ta question : je me suis peut-être mal exprimé en utilisant l'expression "s'arrêter à un point précis". Je voulais juste dire qu'une fois que le joystick ou télécommande est relâché, le moteur s'arrête immédiatement sans continuer sa course d'un dixième de millimètre. Un voiture téléguidée, par exemple, ne fait pas du tout cela: une fois lancée, elle continue de rouler, et pour ce qui est de la direction: elle revient à son point de départ si on lâche la commande qui désaxe les roues. Je voulais juste dire: dès qu'on lâche -> tout doit rester dans cette position.
Avec une télécommande RC (comme celle en photo en première page), dès que tu lâches la manette, le servo revient en position centrale, tu ne peux rien y faire, sauf peut-être avec certains modèles de servos spéciaux. Le choix d'un micro-contrôleur, te permettrait d'utiliser des servos sans ce retour en position centrale, mais ça complique bien les choses : électronique + programmation + manque de force du servo.
Donc, mon avis, le moto-réducteur reste le meilleur choix.
Il me semble avoir déjà vu un système qui utilisait un servo, mais je ne suis pas sûr.Autre question: pour l'autre modèle (pas le pan & tilt), mais l'assistance autofocus, un servo serait-il assez "puissant"?
NB. Ne choisi pas la télécommande je je t'ai indiqué, si tu prends chez eux, achètes plutôt le modèle au-dessus (émetteur 6 canaux), pour deux ou trois dollars de plus. ça t'offrira plus d'évolution, voire même de commander 2 mécanismes (si pas trop éloignés l'un de l'autre)
 />/>
/>/>Edit : sur la vidéo que tu as postée (celle pour l'assistance de l'autofocus), c'est bien un servo, cela confirme ce que je disais.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#24
levend
-
- Membres
-
- 5â¯642 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 15 novembre 2013 - 10:23
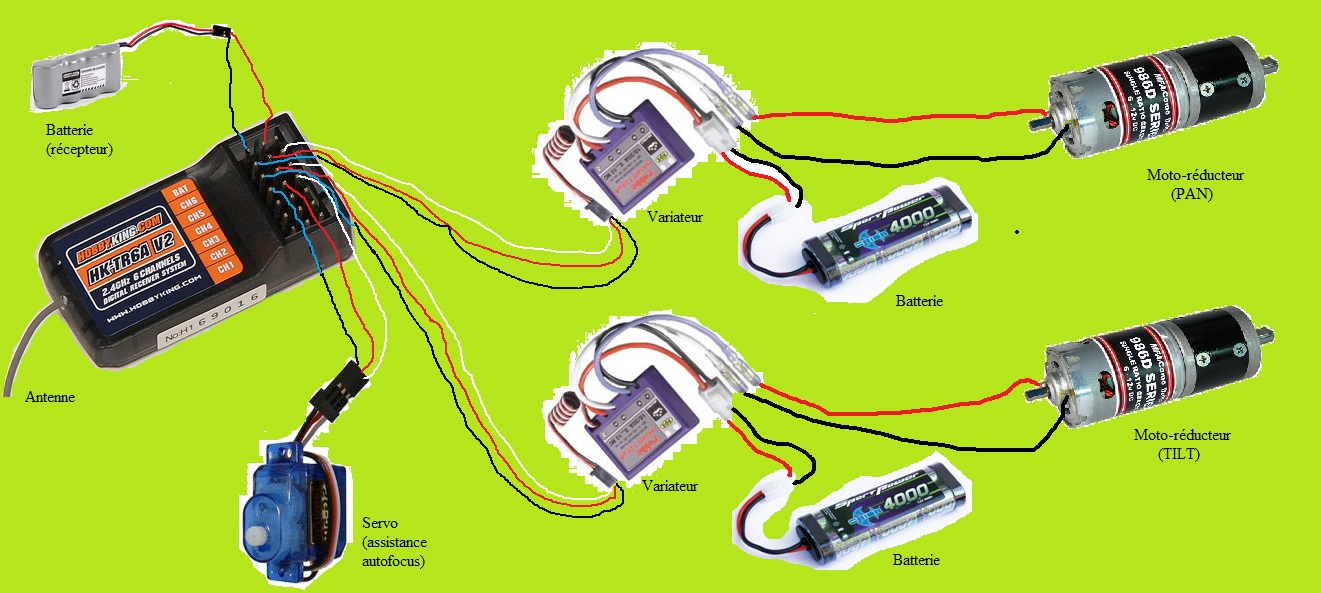
En pièce jointe tu trouveras un petit schéma te montrant la simplicité du montage avec l'utilisation d'une télécommande.
J'ai mis une batterie par moteur, mais ce n'est pas obligatoire, une seule pour les deux peut suffire : la seule différence sera l'autonomie.
J'ai mis un modèle de variateur pour le schéma, mais j'ai du mal à trouver chez les revendeur de modélisme des contrôleur qui ne soit pas pour moteur brushless (les moto-réducteur ne sont pas des moteurs brushless !!! ).
Les contrôleur pour moteur cc que tu peux brancher directement sur le récepteur, tu en trouves un peu partout dans les magasins d'électronique, mais le prix me semble plus abordable que je le croyais.
Le modèle de motoréducteur n'est pas encore déterminé, par il faut savoir le couple nécessaire, et je n'ai pas encore calculé. De plus, comme tu te débrouille pour la partie mécanique, il faut quelques infos supplémentaires afin de choisir au mieux le moteur.
J'ai mis une batterie par moteur, mais ce n'est pas obligatoire, une seule pour les deux peut suffire : la seule différence sera l'autonomie.
J'ai mis un modèle de variateur pour le schéma, mais j'ai du mal à trouver chez les revendeur de modélisme des contrôleur qui ne soit pas pour moteur brushless (les moto-réducteur ne sont pas des moteurs brushless !!! ).
Les contrôleur pour moteur cc que tu peux brancher directement sur le récepteur, tu en trouves un peu partout dans les magasins d'électronique, mais le prix me semble plus abordable que je le croyais.
Le modèle de motoréducteur n'est pas encore déterminé, par il faut savoir le couple nécessaire, et je n'ai pas encore calculé. De plus, comme tu te débrouille pour la partie mécanique, il faut quelques infos supplémentaires afin de choisir au mieux le moteur.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#25
cnob
-
- Membres
- 26 messages
Nouveau membre
Posté 16 novembre 2013 - 01:36
Bizarre, je n'avais pas vu tout vos nouveaux posts sur ce forum, je les découvre à l'instant. Merci beaucoup.
Je vais lire tout ça à l'instant.
Je vais lire tout ça à l'instant.
#26
cnob
-
- Membres
- 26 messages
Nouveau membre
Posté 16 novembre 2013 - 01:59
J'ai un moniteur qui me permet de voir l'image filmée oui et donc évaluer sa netteté.tu disposes d'un retour vidéo pour savoir si l'image est nette ?
Pour moi, il n'y a aucun doute, ceux sont des moto-réducteurs
 />
/> Ca par contre, c'est vraiment embêtant car en situation de film, je ne pourrai pas me permettre de maintenir les manettes en place pour ne pas que la caméra bouge. Si je lâche tout et que la position initiale de l'appareil est établie, autant dire que je rate mon planAvec une télécommande RC (comme celle en photo en première page), dès que tu lâches la manette, le servo revient en position centrale, tu ne peux rien y faire, sauf peut-être avec certains modèles de servos spéciaux. Le choix d'un micro-contrôleur, te permettrait d'utiliser des servos sans ce retour en position centrale, mais ça complique bien les choses : électronique + programmation + manque de force du servo.
Donc, mon avis, le moto-réducteur reste le meilleur choix.
 /> Ne serait-il pas judicieux dès lors d'opter pour un système avec Joystick? (je ne sais pas si cela ferait la différence)
/> Ne serait-il pas judicieux dès lors d'opter pour un système avec Joystick? (je ne sais pas si cela ferait la différence)C'est exactement le genre de schéma que j'attendais !!! Là, je ne sais comment te remercier, c'est génial de ta part!En pièce jointe tu trouveras un petit schéma te montrant la simplicité du montage avec l'utilisation d'une télécommande.
 />
/> Une petite question sur les variateurs: tels que tu les as représentés, ils ne comportent pas de potentiomètre. Est-ce moi qui confond le rôle de ce module? N'est-il pas censé permettre de "choisir" un range de vitesse?
Est-ce qu'avec ce système la vitesse de rotation de l'engin pourra être très très lente?
Je pense avoir trouver une vidéo qui montre une réalisation similaire avec des Servos :
Si c'est un montage qui vous semble correct (mais on dirait, comme il fait son boulot) pouvez-vous me l'expliquer? Comment se fait-il qu'il y est parvenu avec des servos? Si c'est bien le cas, à votre avis, quels sont ces modèles? Quel est le modèle du récepteur (la télécommande, je pense savoir de quoi il s'agit). Faut-il passer par de la programmation?
#27
levend
-
- Membres
-
- 5â¯642 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 16 novembre 2013 - 08:26
Je disais ça uniquement pour les servos, bon, maintenant, il y a peut être des possibilité pour que résoudre ce problème (nouveau servo ? télécommande programmable ? ). Pour l'utilisation avec des moteurs (ou moto-réducteur), c'est différent, il ne tourne que lorsque tu bouges la manette et s'arrète des que tu la lâche.J'ai un moniteur qui me permet de voir l'image filmée oui et donc évaluer sa netteté.
Ca par contre, c'est vraiment embêtant car en situation de film, je ne pourrai pas me permettre de maintenir les manettes en place pour ne pas que la caméra bouge. Si je lâche tout et que la position initiale de l'appareil est établie, autant dire que je rate mon plan
C'est exactement le genre de schéma que j'attendais !!! Là, je ne sais comment te remercier, c'est génial de ta part!
Une petite question sur les variateurs: tels que tu les as représentés, ils ne comportent pas de potentiomètre. Est-ce moi qui confond le rôle de ce module? N'est-il pas censé permettre de "choisir" un range de vitesse?
Est-ce qu'avec ce système la vitesse de rotation de l'engin pourra être très très lente?
Déjà avec le réducteur, ce ne sera jamais très rapide.
Ce type de variateur n'utilise pas de potentiomètre, puisque c'est le signal envoyer par le récepteur qui commandera la vitesse et le sens de rotation.
Par exemple : si tu pousse légèrement le manche en avant, ton moteur tournera lentement, si tu le pousse un peu plus, le moteur tournera un peu plus vite, et si tu pousse le manche à fond en avant, ton moteur tournera au maximum de sa vitesse.
Maintenant, si tu ramènes le manche vers le centre, le moteur ralentira. Et si tu tire en arrière (par rapport au centre), le moteur tournera dans l'autre sens, et la vitesse sera toujours proportionnelle à la position du manche.
Je pense avoir trouver une vidéo qui montre une réalisation similaire avec des Servos :
Si c'est un montage qui vous semble correct (mais on dirait, comme il fait son boulot) pouvez-vous me l'expliquer? Comment se fait-il qu'il y est parvenu avec des servos? Si c'est bien le cas, à votre avis, quels sont ces modèles? Quel est le modèle du récepteur (la télécommande, je pense savoir de quoi il s'agit). Faut-il passer par de la programmation?
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#28
cnob
-
- Membres
- 26 messages
Nouveau membre
Posté 17 novembre 2013 - 06:35
Mais pour le modèle sur la vidéo que j'ai postée hier, tu penses qu'il a dû programmer la carte? Ou qu'un simple branchement a suffit?
Etant donné qu'il n'y a pas de point min et max à définir.
Si j'achète un kit comme ça par exemple : http://www.phidgets.com/docs/1061_User_Guide
je vois qu'il y a de la programmation, mais est-elle facultative? Ceci dit, ça n'a pas l'air compliqué si j'en crois les printscreen du logiciel.
Dans le cas de ce kit, est-il possible d'y brancher un joystick?
Pff, je suis denouveau perdu....
Ici, dans la vidéo ci-dessous (regarder à 1:00) on voit clairement le joytcik dont je parle et le fait qu'il ne replace pas le mouvement à sa position initiale lorsqu'il lache le joystick.
Ce montage vous semble-t-il complexe ?
Etant donné qu'il n'y a pas de point min et max à définir.
Si j'achète un kit comme ça par exemple : http://www.phidgets.com/docs/1061_User_Guide
je vois qu'il y a de la programmation, mais est-elle facultative? Ceci dit, ça n'a pas l'air compliqué si j'en crois les printscreen du logiciel.
Dans le cas de ce kit, est-il possible d'y brancher un joystick?
Pff, je suis denouveau perdu....
Ici, dans la vidéo ci-dessous (regarder à 1:00) on voit clairement le joytcik dont je parle et le fait qu'il ne replace pas le mouvement à sa position initiale lorsqu'il lache le joystick.
Ce montage vous semble-t-il complexe ?
#29
ChristianR
-
- Membres
-
- 474 messages
Habitué
- Gender:Male
- Location:Isère (38)
- Interests:Arduino, programmation, électronique...
Posté 17 novembre 2013 - 08:07
Rotation complète sur 360° donc ce ne sont pas des servomoteurs (sur 180° environ)
Visiblement c'est monté avec 2 moteurs pas à pas avec démultiplication par poulie et courroie crantée. Pas de télécommande mais transmission par un câble.
Visiblement c'est monté avec 2 moteurs pas à pas avec démultiplication par poulie et courroie crantée. Pas de télécommande mais transmission par un câble.
Christian
#30
cnob
-
- Membres
- 26 messages
Nouveau membre
Posté 18 novembre 2013 - 02:06
Ah, un servo ne peut pas effectuer une rotation à 360°... Je note.
Oui, pour moi, ça peut être câblé, ce n'est pas du tout un inconvénient. Et pratiquement le système de joystick est plus commode qu'une télécommande.
Est-ce difficile de réaliser ce montage? Que faudrait-il prévoir? Ce sont des motoréducteurs alors?
Oui, pour moi, ça peut être câblé, ce n'est pas du tout un inconvénient. Et pratiquement le système de joystick est plus commode qu'une télécommande.
Est-ce difficile de réaliser ce montage? Que faudrait-il prévoir? Ce sont des motoréducteurs alors?
#31
ChristianR
-
- Membres
-
- 474 messages
Habitué
- Gender:Male
- Location:Isère (38)
- Interests:Arduino, programmation, électronique...
Posté 18 novembre 2013 - 12:28
On peut faire tourner des servos à 360° en les modifiant, mais ce n'est plus le même usage.
Le choix des moteurs dépend de la masse du montage et de son bon centrage, de l'inertie des pièces et des accélérations qu'on souhaite faire.
Sur ce genre de projet on dessine la mécanique au départ.
Le choix des moteurs dépend de la masse du montage et de son bon centrage, de l'inertie des pièces et des accélérations qu'on souhaite faire.
Sur ce genre de projet on dessine la mécanique au départ.
Christian
#32
Matt
-

- Membres
- 7 messages
Nouveau membre
Posté 20 novembre 2013 - 02:22
Hello cnob,
Je confirme que des servos moteurs ne peuvent pas tourner à 360°. Tu peux utiliser des moteurs pas à pas, mais le problème est qu'ils sont assez honéreux dès que la charge devient lourde et il te faut 2x plus de carte de controle (type Shield Motor sur l'arduino, 1 carte par moteur PAP).
Si tu souhaites connaître la position courante de ton moteur, pour pas cher, tu peux utiliser les roues codeuses que l'on trouve dans les anciennes souris à boule, il y en a 2 dans chaque souris, couplé à un motoreducteur, tu auras ainsi, un moteur dont sa vitesse est réglable ainsi que sa position grâce au roue codeuse pour quedal.
Matthieu
Je confirme que des servos moteurs ne peuvent pas tourner à 360°. Tu peux utiliser des moteurs pas à pas, mais le problème est qu'ils sont assez honéreux dès que la charge devient lourde et il te faut 2x plus de carte de controle (type Shield Motor sur l'arduino, 1 carte par moteur PAP).
Si tu souhaites connaître la position courante de ton moteur, pour pas cher, tu peux utiliser les roues codeuses que l'on trouve dans les anciennes souris à boule, il y en a 2 dans chaque souris, couplé à un motoreducteur, tu auras ainsi, un moteur dont sa vitesse est réglable ainsi que sa position grâce au roue codeuse pour quedal.
Matthieu
#33
cnob
-
- Membres
- 26 messages
Nouveau membre
Posté 22 novembre 2013 - 01:17
Si tu souhaites connaître la position courante de ton moteur, pour pas cher, tu peux utiliser les roues codeuses que l'on trouve dans les anciennes souris à boule, il y en a 2 dans chaque souris, couplé à un motoreducteur, tu auras ainsi, un moteur dont sa vitesse est réglable ainsi que sa position grâce au roue codeuse pour quedal.
Tu penses donc que je pourrai piloter mon engin avec un trackball par exemple? Mais comment raccorder celui-ci à la carte contrôleur?
#34
Matt
-
- Membres
- 7 messages
Nouveau membre
Posté 22 novembre 2013 - 02:10
Non, je n'ai pas dis ça  /> , je te propose simplement une solution alternative au moteur pas à pas. Je dis que si tu souhaites connaître la position de tes axes, tu peux y fixer les roues codeuses des anciennes souris à boule, cela te donnera des données numériques pour connaître précisement la position de tes axes. Ainsi, tu pourras piloter ton robot par n'importe quoi (trackball y compris).
/> , je te propose simplement une solution alternative au moteur pas à pas. Je dis que si tu souhaites connaître la position de tes axes, tu peux y fixer les roues codeuses des anciennes souris à boule, cela te donnera des données numériques pour connaître précisement la position de tes axes. Ainsi, tu pourras piloter ton robot par n'importe quoi (trackball y compris).
Pour pour commencer, je pense que tu devrais commencer simplement :
- Un Arduino (dispo ici : http://www.selectronic.fr/carte-arduino-uno.html)
- Deux servos moteurs modifiés (cf ici pour la modification : http://www.robot-maker.com/forum/tutorials/article/47-modification-dun-servomoteur-en-moteur-a-rotation-continue/)
- Toute la mécanique autour de ça.
Déjà si tu es arrivé à ce point là, nous pourrions aller plus loin dans la réflexion (Trackball, roue codeuse, moteur pas à pas, ajout d'un 3ème axe, mémorisation des emplacements etc.)
Aussi, je parle d'Arduino car je trouve cette plateforme vraiment pratique pour commencer en robotique, mais il en existe d'autre.
/> , je te propose simplement une solution alternative au moteur pas à pas. Je dis que si tu souhaites connaître la position de tes axes, tu peux y fixer les roues codeuses des anciennes souris à boule, cela te donnera des données numériques pour connaître précisement la position de tes axes. Ainsi, tu pourras piloter ton robot par n'importe quoi (trackball y compris).Pour pour commencer, je pense que tu devrais commencer simplement :
- Un Arduino (dispo ici : http://www.selectronic.fr/carte-arduino-uno.html)
- Deux servos moteurs modifiés (cf ici pour la modification : http://www.robot-maker.com/forum/tutorials/article/47-modification-dun-servomoteur-en-moteur-a-rotation-continue/)
- Toute la mécanique autour de ça.
Déjà si tu es arrivé à ce point là, nous pourrions aller plus loin dans la réflexion (Trackball, roue codeuse, moteur pas à pas, ajout d'un 3ème axe, mémorisation des emplacements etc.)
Aussi, je parle d'Arduino car je trouve cette plateforme vraiment pratique pour commencer en robotique, mais il en existe d'autre.
#35
cnob
-
- Membres
- 26 messages
Nouveau membre
Posté 22 novembre 2013 - 10:24
Merci pour ta contribution Matt
C'est assez surprenant que ça devienne si compliqué (je dis ça, parce qu'on est déjà parti dans plusieurs directions et que je ne sais plus trop où donner de la tête à présent).
Bon: j'aimerais (sagement) commencer par l'autre modèle, l'assistance autofocus qui, en gros, n'est jamais qu'un simple servomoteur (là, pas besoin qu'il fasse 360°).
Pour résumer, voici ce qu'il faudrait :
- Un servo (suffisamment puissant pour tourner une bague d'objectif, mais au vu de la vidéo, il n'a pas l'air d'être bien gros)
- une carte contrôleur (on était parti sur une carte HK-TRG6A v2, mais je suppose que c'est celle qui va avec la télécommande, donc, faut-il la garder dans le cas d'une commande filaire? Je suppose qu'il faut une autre carte...?)
- une commande filaire de type joystick à 1 seul axe. Quand le levier irait à gauche, le servo tournerait vers la gauche et vers la droite... ça troune à droite, forcément. Le petit plus, mais très important: que la vitesse soit variable en fonction de de l'inclinaison du levier. Donc, concrètement: je pousse à gauche le levier un tout petit peu => ça tourne tout doucement le servo dans le sens contraire des aiguilles d'une montre. Si je pousse très fort à gauche, ça tourne à pleine vitesse le servo, tjs dans le même sens. Et idem pour la droite (enfin symétriquement, évidemment)
Ca serait super dur de faire ça? Vous feriez comment, vous, pour le faire? Je ne comprends pas pourquoi c'est si compliqué, ce n'est pas la base de la base de la robotique ça? Quand j'étais petit j'avais ça sur un petit bras de robot téléguidé: un petit joysctick qui faisait aller le bras à droite ou à gauche plus vite ou moins vite en fonction de ma pression sur le levier de la commande filaire... Et c'était il y a 25 ans et ce robot ne coûtait quasi rien ^^... C'est pour ça que je me demande si je me fais bien comprendre pour ma demande, parce qu'on me propose tellement de piste alors que ça devrait être évident tout de suite pour tous les gens sur ce forum...
Qu'est-ce qui cloche en fait? (si on se concentre sur le "petit" projet dont je viens de parler...)
C'est assez surprenant que ça devienne si compliqué (je dis ça, parce qu'on est déjà parti dans plusieurs directions et que je ne sais plus trop où donner de la tête à présent).
Bon: j'aimerais (sagement) commencer par l'autre modèle, l'assistance autofocus qui, en gros, n'est jamais qu'un simple servomoteur (là, pas besoin qu'il fasse 360°).
Pour résumer, voici ce qu'il faudrait :
- Un servo (suffisamment puissant pour tourner une bague d'objectif, mais au vu de la vidéo, il n'a pas l'air d'être bien gros)
- une carte contrôleur (on était parti sur une carte HK-TRG6A v2, mais je suppose que c'est celle qui va avec la télécommande, donc, faut-il la garder dans le cas d'une commande filaire? Je suppose qu'il faut une autre carte...?)
- une commande filaire de type joystick à 1 seul axe. Quand le levier irait à gauche, le servo tournerait vers la gauche et vers la droite... ça troune à droite, forcément. Le petit plus, mais très important: que la vitesse soit variable en fonction de de l'inclinaison du levier. Donc, concrètement: je pousse à gauche le levier un tout petit peu => ça tourne tout doucement le servo dans le sens contraire des aiguilles d'une montre. Si je pousse très fort à gauche, ça tourne à pleine vitesse le servo, tjs dans le même sens. Et idem pour la droite (enfin symétriquement, évidemment)
Ca serait super dur de faire ça? Vous feriez comment, vous, pour le faire? Je ne comprends pas pourquoi c'est si compliqué, ce n'est pas la base de la base de la robotique ça? Quand j'étais petit j'avais ça sur un petit bras de robot téléguidé: un petit joysctick qui faisait aller le bras à droite ou à gauche plus vite ou moins vite en fonction de ma pression sur le levier de la commande filaire... Et c'était il y a 25 ans et ce robot ne coûtait quasi rien ^^... C'est pour ça que je me demande si je me fais bien comprendre pour ma demande, parce qu'on me propose tellement de piste alors que ça devrait être évident tout de suite pour tous les gens sur ce forum...
Qu'est-ce qui cloche en fait? (si on se concentre sur le "petit" projet dont je viens de parler...)
#36
levend
-
- Membres
-
- 5â¯642 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 23 novembre 2013 - 12:11
Ce qui cloche, si on se concentre sur le jouet dont tu as parlé :
Je t'avais indiqué le sytème par télécommande, parce qu'il n'y avait ni électronique, ni programmation. C'était quasiment du plug & play.
Je ne peux pas te montrer le système parce que j'utilise des plus gros moteur (24V, 10/20A) et je n'ai ni alim pour remplacer les batteries (pour le test), ni alim pour charger les batteries.
Mais si tu veux, je peux te faire un petit montage et je prendrai une photo pour te montrer à quel point c'est simple, la vidéo sera pour le jour où j'aurai du 24V pour alimenter mes moteurs.
Comme on est sur un forum de robotique, il est normal d'utiliser un arduino, sauf qu'en ce qui me concerne, je n'en vois pas l'intérêt, sauf si tu veux suivre la piste de Matt : mémorisation de position et contrôle du mouvement ...
Enfin, ce n'est que mon avis.
- A l'époque, tu étais du côté utilisateur > tout était simple
- Maintenant, tu es du côté concepteur/constructeur, ça se complique.
Je t'avais indiqué le sytème par télécommande, parce qu'il n'y avait ni électronique, ni programmation. C'était quasiment du plug & play.
Je ne peux pas te montrer le système parce que j'utilise des plus gros moteur (24V, 10/20A) et je n'ai ni alim pour remplacer les batteries (pour le test), ni alim pour charger les batteries.
Mais si tu veux, je peux te faire un petit montage et je prendrai une photo pour te montrer à quel point c'est simple, la vidéo sera pour le jour où j'aurai du 24V pour alimenter mes moteurs.
Comme on est sur un forum de robotique, il est normal d'utiliser un arduino, sauf qu'en ce qui me concerne, je n'en vois pas l'intérêt, sauf si tu veux suivre la piste de Matt : mémorisation de position et contrôle du mouvement ...
Enfin, ce n'est que mon avis.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO
#37
cnob
-
- Membres
- 26 messages
Nouveau membre
Posté 23 novembre 2013 - 01:36
/>/>/>/> Ce que j'ai du mal à comprendre c'est pourquoi un système filaire demande de la programmation et pas une télécommande. (sans doute que le "programme" est déjà inscrit dans le processeur de la télécommande?)
Pouvez-vous regarder à 4m17 la vidéo ci-dessous :
Où puis-je trouver un petit contrôleur rotatif comme celui-là? Il est bien relié à un servo il me semble, mais via quel type de carte? Ce système semble extrêmement simple à réaliser ou bien est-ce juste une impression?
Voici une variante de celui ci-dessus (réalisé pour moins de 40 euros):
#38
ChristianR
-
- Membres
-
- 474 messages
Habitué
- Gender:Male
- Location:Isère (38)
- Interests:Arduino, programmation, électronique...
Posté 23 novembre 2013 - 04:26
Ta deuxième vidéo utilise un servomoteur, un testeur de servo, et un boitier à piles, sans programmation.
Difficile de faire plus simple (pour une quinzaine d'€).
Par contre il faut se faire un engrenage d'entrainement de la bague de MAP sur l'objectif.
Difficile de faire plus simple (pour une quinzaine d'€).
Par contre il faut se faire un engrenage d'entrainement de la bague de MAP sur l'objectif.
Christian
#39
cnob
-
- Membres
- 26 messages
Nouveau membre
Posté 23 novembre 2013 - 09:57
Ah, ça, pour être simple, c'est simple!
Arrives-tu à identifier le type de servo sur la vidéo? Sa puissance? Le modèle exacte? (comme ça je suis certain qu'il fonctionnera pour tourner la bague de l'objectif)
Si je lis bien, ce testeur de servo Turnigy fonctionne avec une batterie entre 4,8 et 6 volt... sera-ce le voltage correspondant à celui du servo? Ou bien le testeur absorbe aussi de l'énergie et il faut prévoir plus de courant?
Comment se recharge les batteries que l'on utilise habituellement sur ces petits appareils?
Arrives-tu à identifier le type de servo sur la vidéo? Sa puissance? Le modèle exacte? (comme ça je suis certain qu'il fonctionnera pour tourner la bague de l'objectif)
Si je lis bien, ce testeur de servo Turnigy fonctionne avec une batterie entre 4,8 et 6 volt... sera-ce le voltage correspondant à celui du servo? Ou bien le testeur absorbe aussi de l'énergie et il faut prévoir plus de courant?
Comment se recharge les batteries que l'on utilise habituellement sur ces petits appareils?
#40
ChristianR
-
- Membres
-
- 474 messages
Habitué
- Gender:Male
- Location:Isère (38)
- Interests:Arduino, programmation, électronique...
Posté 23 novembre 2013 - 10:49
Le "testeur" est un potentiomètre qui fournit au servo les impulsions bien calibrées pour le commander, il se monte en série entre l'alim et le servo.
Une batterie rechargeable de 6V fait l'affaire.
Le chargeur dépend du type de batterie, on trouve aussi des chargeurs universels (LIPO, NiMH, etc...)
Une batterie rechargeable de 6V fait l'affaire.
Le chargeur dépend du type de batterie, on trouve aussi des chargeurs universels (LIPO, NiMH, etc...)
Christian








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




