

J'aimerais avoir quelques avis concernant le problème que je rencontre, je suis en plein test du L293D et je suis entrain de coder toute la partie programmation de mon futur petit engin.
J'ai donc utilisé une breadboard, sur laquelle j'ai fait mes divers branchements, qui fonctionnent pour tout sauf ... une pin out, il s'agit de la 3Y. (http://www.ti.com/lit/ds/symlink/l293d.pdf)
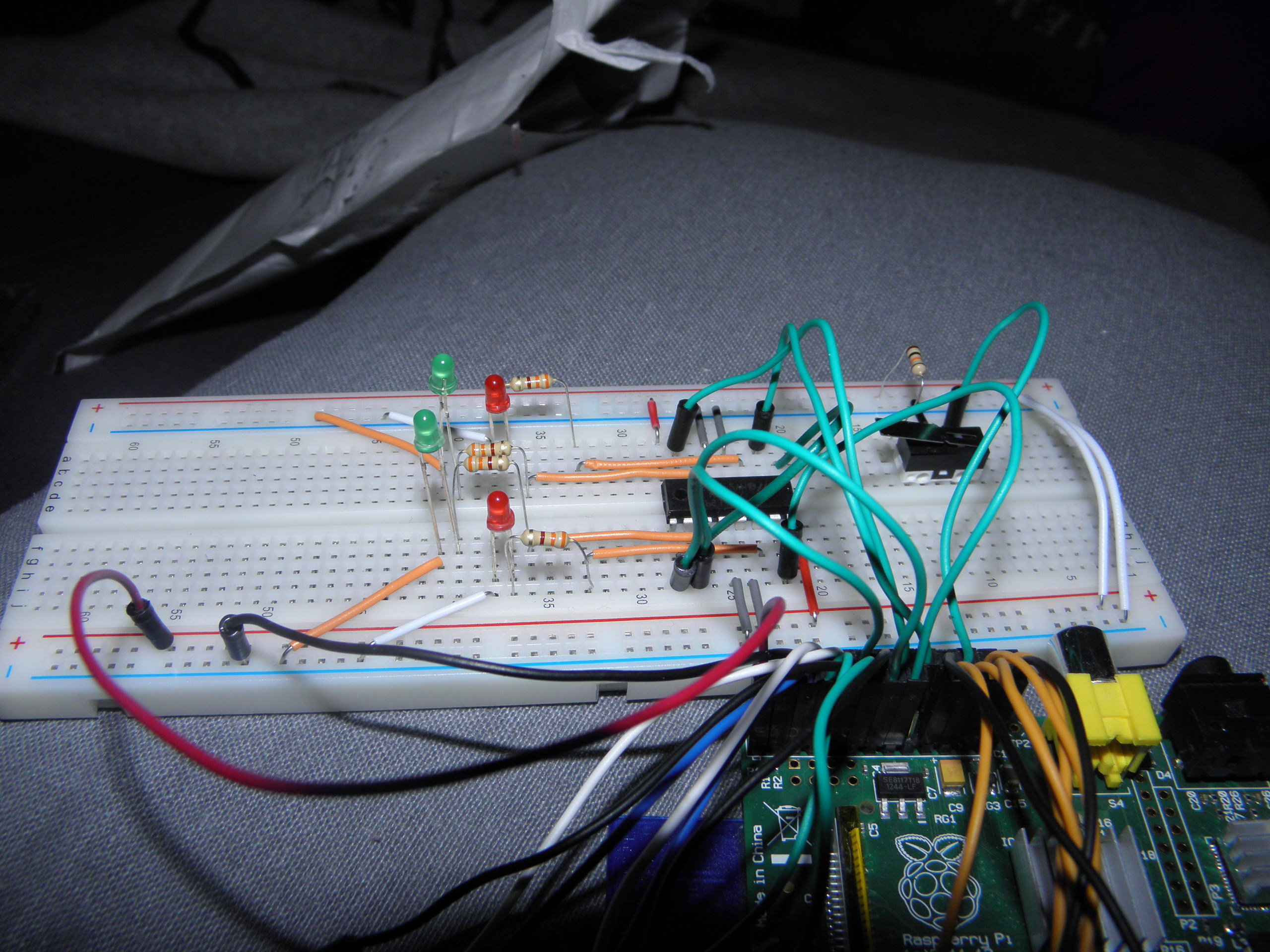
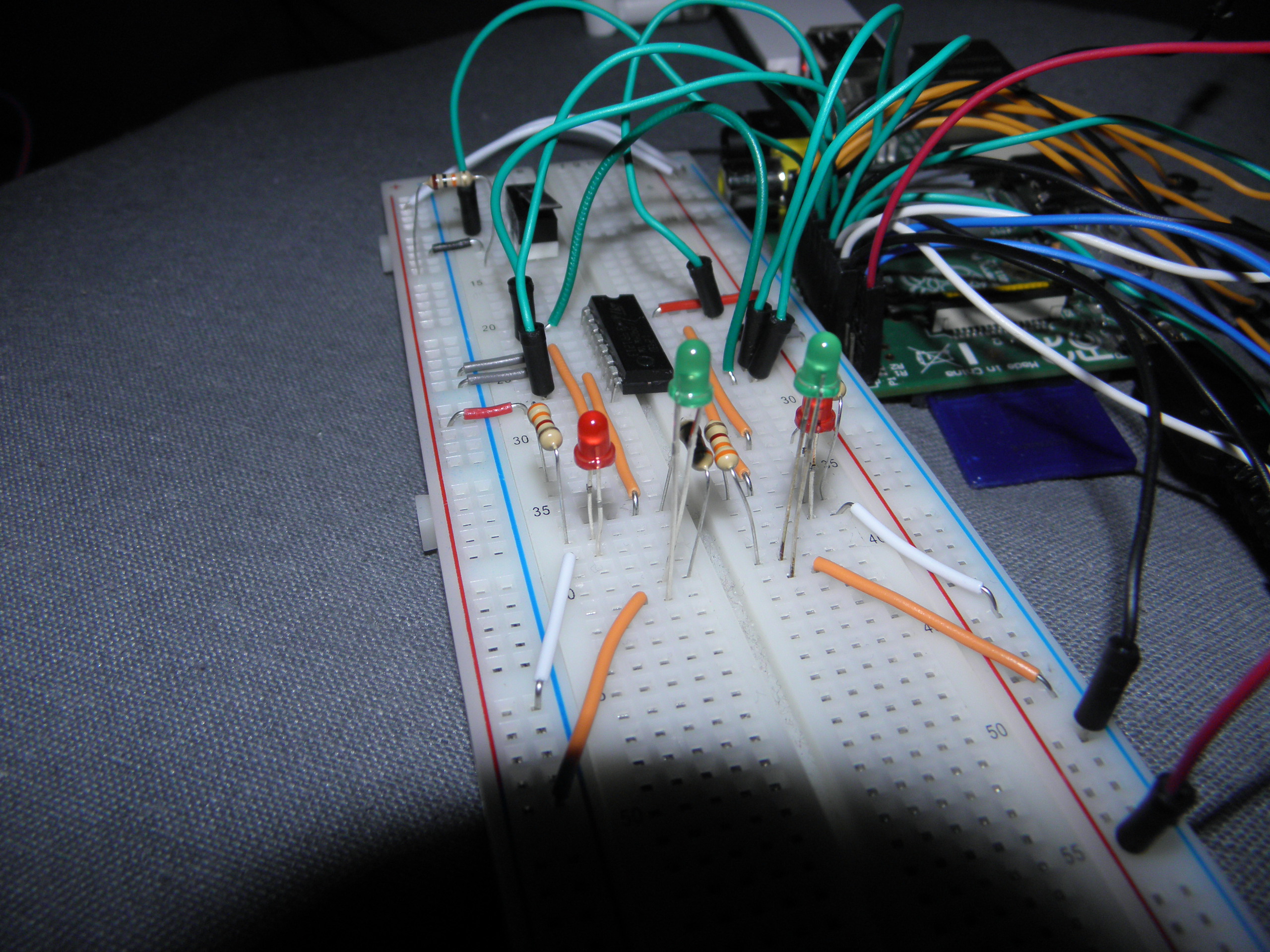
Chose assez embêtante, quand j'utilise mon voltmètre pour voir ce qui sort des différentes pin, toutes les pin out me sortent du 2 ~ 2.2V sauf celle-là. Mes différentes led s'allument aussi correctement, sauf bien sûr, celle connectée à la pin 3Y. Il s'agit de la partie "Motor right turns right" de mon code, et de la led verte de droite, située sur la ligne 'g' de ma breadboard.
Ici deux photos de mon montage (Ce n'est pas très voyant, mais les deux pins enable sont connectées entre-elles. Je les mets HIGH quand je veux faire tourner les moteurs, et en LOW quand je veux les couper.)
Et voici mon code,
import RPi.GPIO as GPIO, time GPIO.setmode(GPIO.BCM) enable = 14 # Two pins enable are inter-connected motorLeftA = 24 # 1A, take a look at the data-sheet motorLeftB = 23 # 2A motorRightA = 21 # 3A motorRightB = 22 # 4A # Enabling the pins, and avoiding it to be HIGH GPIO.setup(enable, GPIO.OUT) GPIO.output(enable, GPIO.LOW) GPIO.setup(motorLeftA, GPIO.OUT) GPIO.output(motorLeftA, GPIO.LOW) GPIO.setup(motorLeftB, GPIO.OUT) GPIO.output(motorLeftB, GPIO.LOW) GPIO.setup(motorRightA, GPIO.OUT) GPIO.output(motorRightA, GPIO.LOW) GPIO.setup(motorRightB, GPIO.OUT) GPIO.output(motorRightB, GPIO.LOW) #---------------------- # Motor left turns left #---------------------- #GPIO.output(motorLeftA, GPIO.HIGH) #GPIO.output(motorLeftB, GPIO.LOW) #----------------------- # Motor left turns right #----------------------- GPIO.output(motorLeftA, GPIO.LOW) GPIO.output(motorLeftB, GPIO.HIGH) #----------------------- # Motor right turns left #----------------------- #GPIO.output(motorRightA, GPIO.HIGH) #GPIO.output(motorRightB, GPIO.LOW) #------------------------ # Motor right turns right #------------------------ GPIO.output(motorRightA, GPIO.LOW) GPIO.output(motorRightB, GPIO.HIGH) # Enable to HIGH GPIO.output(enable, GPIO.HIGH) time.sleep(3) GPIO.cleanup()
















