
bonjour , je suis moel ,je travail dans le spectacle vivant ,cirque et spectacle de rue, ainsi qu'en technique et regie ,
je suis multibidouilleur autodidact menuserie, feraille et un peu d'electro-arduino-informatico-mecanique.
je suis bien content d'etre tombé sur ce forum car je suis sur un projet qui releve des compétences de pas mal des fideles du lieu.
Je m'explique:
Je cherche à fabriquer des (3) ecrans mobiles pour un spectacle, je dispose de moteurs de fauteuiles roulants ,
l'idée c'est donc: des structures en metal avec la toile tendue munie de deux roue motorisées (et une troisieme de type roue de cadie pour l'equilibre a l'arriere)
la contrainte : je dois pouvoir les manier avec le soft de la regie lumiere via DMX512 donc je cherche à interpreter un signal DMX et à le traduite à mes moteurs ,
je verais bien un truc dans l'eprit
-un potar gere un moteur,
-a mi course le moteur est arreté si on descend il tourne dans un sens si on monte il tourne dans l'autre sens plus , ce plus ou moins vite en fonction du niveau
suis-je clair?
je ne suis pas une fleche en arduino , mais j'ai des bases, mais j'ai peur de galerer au niveau de l'exploitation du signal dmx (mais c'est le caher des charges)
je n'ai pas les moteurs (motoreducteurs) avec moi pour verifier on me dit que c'est du 24w ce qui me parais peu je sais que c'est 24v mais le cas echeant 1A a doit pas etre la mort à gerer .
voila , je vais maintenant aller faire un tour sur les projets exposer ici pour trouver l'inspiration.
a bientot
Moel

9 réponses à ce sujet
#2

Mike118
-

- Administrateur
-

- 10â¯293 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 27 mars 2014 - 08:24
Bienvenu sur le forum  et à bientôt !
et à bientôt !
et à bientôt !
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#3
olivthill
-

- Membres
-
- 143 messages
Membre occasionnel
- Gender:Male
- Location:Normandie
- Interests:Robots humanoides.
Posté 27 mars 2014 - 11:17
Bienvenue moel.
C'est un projet concret et réalisable, donc intéressant.
Je veux bien donner un coup de main si ça se passe pas loin de chez moi (Val de Marne).
C'est un projet concret et réalisable, donc intéressant.
Je veux bien donner un coup de main si ça se passe pas loin de chez moi (Val de Marne).
#4
moel
-
- Membres
- 7 messages
Nouveau membre
Posté 28 mars 2014 - 02:03
bonjour
j'ai trouvé les drivers moteur sabertooth qui ont l'air adaptés et polyvalents, reste à savoir comment interpreter du signal dmx pour communiquer avec les drivers.... des pics on l'air de pouvoir mais moi y'en a pas parler pic,
je pense aussi a des driver de led, qui gèrent le dmx, De là, adapter pour la getion des moteurs, c'est complètement irréaliste?
a suivre
j'ai trouvé les drivers moteur sabertooth qui ont l'air adaptés et polyvalents, reste à savoir comment interpreter du signal dmx pour communiquer avec les drivers.... des pics on l'air de pouvoir mais moi y'en a pas parler pic,
je pense aussi a des driver de led, qui gèrent le dmx, De là, adapter pour la getion des moteurs, c'est complètement irréaliste?
a suivre
#5
ChristianR
-

- Membres
-
- 474 messages
Habitué
- Gender:Male
- Location:Isère (38)
- Interests:Arduino, programmation, électronique...
Posté 28 mars 2014 - 08:49
Est ce que tes engins peuvent avoir un "fil à la patte", pour l'alimentation et la commande ?
Christian
#6
Mike118
-
- Administrateur
-
- 10â¯293 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 28 mars 2014 - 11:10
Je viens de me renseigner un peu sur le signal DMX mais puisque tu utilise déjà (un peu ) arduino et pas de pic, une arduino peut aussi bien te permettre de décoder le signal.
Après il existe peut être même déjà une librairie de faite pour arduino! à chercher!
Après il existe peut être même déjà une librairie de faite pour arduino! à chercher!
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#7
moel
-
- Membres
- 7 messages
Nouveau membre
Posté 28 mars 2014 - 11:11
bonsoir,
pour l'instant oui,même si par le suite 'envisagerais bien de passer en wireless vu que si ca joue sur batterie autant saffranchir de fil a la patte
mais là j'ai pas le budget!
bonne soirée
pour l'instant oui,même si par le suite 'envisagerais bien de passer en wireless vu que si ca joue sur batterie autant saffranchir de fil a la patte
mais là j'ai pas le budget!
bonne soirée
#8
ChristianR
-
- Membres
-
- 474 messages
Habitué
- Gender:Male
- Location:Isère (38)
- Interests:Arduino, programmation, électronique...
Posté 29 mars 2014 - 09:27
Il existe un shield pour Arduino et une librairie pour traiter le DMX, du coup c'est simple tu récupères du PWM pour commander les moteurs.
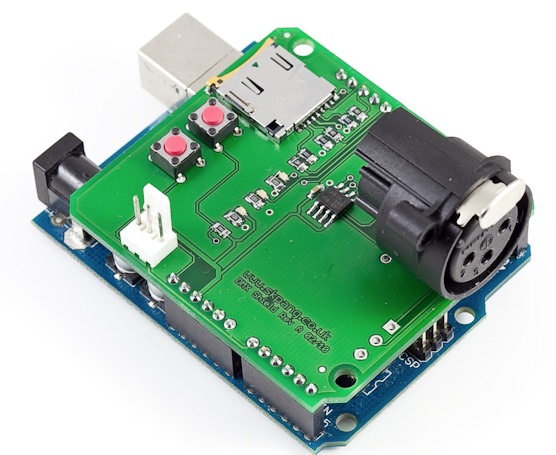
http://forum.arduino.cc/index.php/topic,23889.0.html
Image(s) jointe(s)

Christian
#9
moel
-
- Membres
- 7 messages
Nouveau membre
Posté 29 mars 2014 - 10:16
bonsoir,
de ce que j'en ai lu,les lib dmx sont plus orientée émission que réception. j'y retourne....
de ce que j'en ai lu,les lib dmx sont plus orientée émission que réception. j'y retourne....
#10
moel
-
- Membres
- 7 messages
Nouveau membre
Posté 21 juin 2014 - 10:54
re-moi!
bojour
je bifurque légèrement mais sur le même projet, les châssis sont conçus,mais effectivement après réflexion la norme DMX doit rester pour la lumière ,
j'ai donc pris la direction de la liaison série avec un ordinateur,
l'idée est donc d'avoir trois éléments mobiles sur scène qui vont se déplacer pendant la pièce, il sont chacun équipé de deux moteurs de fauteuils roulants (25A)
chacun doit pouvoir déplacé indépendamment des autre l'idée est donc d'avoir la possibilité de contrôler six moteurs depuis un ordinateur sous la forme de "top"
( à un instant T ou à tel événement un ensemble de commande est envoyé )
j' ai un proto composé d'un driver sabertooth 2x12a et deux moteurs dessuies glace,
je vois qu'il est possible de développer quelque chose via le port parallèle d'un pc , mais je ne connais rien en programmation (a part commander un servo moteur et allumer des led sur arduino)
j'aimerais ne pas avoir a changer les moteur pour des pas a pas, j'ai vus qu'il existait des encodeur rotatifs gérés par un driver kangaroo qui complète le sabertooth, quelqu'un a deja expérimenté ça ?
bref je nage un peut là,
bojour
je bifurque légèrement mais sur le même projet, les châssis sont conçus,mais effectivement après réflexion la norme DMX doit rester pour la lumière ,
j'ai donc pris la direction de la liaison série avec un ordinateur,
l'idée est donc d'avoir trois éléments mobiles sur scène qui vont se déplacer pendant la pièce, il sont chacun équipé de deux moteurs de fauteuils roulants (25A)
chacun doit pouvoir déplacé indépendamment des autre l'idée est donc d'avoir la possibilité de contrôler six moteurs depuis un ordinateur sous la forme de "top"
( à un instant T ou à tel événement un ensemble de commande est envoyé )
j' ai un proto composé d'un driver sabertooth 2x12a et deux moteurs dessuies glace,
je vois qu'il est possible de développer quelque chose via le port parallèle d'un pc , mais je ne connais rien en programmation (a part commander un servo moteur et allumer des led sur arduino)
j'aimerais ne pas avoir a changer les moteur pour des pas a pas, j'ai vus qu'il existait des encodeur rotatifs gérés par un driver kangaroo qui complète le sabertooth, quelqu'un a deja expérimenté ça ?
bref je nage un peut là,








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




