
Bonjour, je poste encore et encore. Cette fois-ci je poste pour une station de recharge car à chaque fois enlever les accus NiMH prend du temps j'aimerai positionner le robot en marche arrière et il se recharge. Comment faire ? Quel est le coût ?
PS : Désolé si il fallait posté dans la partie énergie.
Cordialement.

7 réponses à ce sujet
#2

transistance
-

- Membres
-

- 411 messages
Membre passionné
Posté 11 avril 2014 - 07:34
Bonjour,
- Le robot évolue-t-il en intérieur ou extérieur ?
- Le robot se déplace-t-il à proximité immédiate de la station de recharge ?
Mais en tout cas il faut que tu te débrouille pour que le robot puisse connaître la position de la base de recharge, notamment grâce à une balise, afin de pouvoir accoster ta station de recharge.
Le plus simple, si ton robot évolue en intérieur, c'est que ta station émette un rayon infrarouge modulé(faut qu'il soit un minimum directif) que ton robot puisse voir via un ou deux récepteur(s) IR genre TSOP. Quand ton robo veux se recharger, il recherche ce signal et, une fois qu'il l'a trouvé, avance sans perdre le signal (donc avance vers la station). Quand ton robot détecte un obstacle alors il sait qu'il est tout prés de la station... plus qu'a faire un demi tour pour se recharger (puisqu'en lisant ton post tu sembles dire que les connecteurs de recharge de ton robot seraient à l'arrière de celui-ci) et reculer pour entrer en contact avec la station.
Fait des recherches avec les mots suivants en français(en anglais) : balise(beacon), accostage(docking)etc.
Ce processus est abordé ici par exemple.
J'en parle aussi un peu sur mon site puisque je travail là dessus pour mon robot d'exploration. Sans vouloir te décourager c'est un chemin semé d'embuche (du moins dans mon cas puisque mon robot évolue en extérieur, ça complique un peu) cependant c'est très intéressant à étudier.
Il n'y a pas de façon type de faire, ça dépend de pas mal de paramètres dont, par exemple:Comment faire ?
- Le robot évolue-t-il en intérieur ou extérieur ?
- Le robot se déplace-t-il à proximité immédiate de la station de recharge ?
Mais en tout cas il faut que tu te débrouille pour que le robot puisse connaître la position de la base de recharge, notamment grâce à une balise, afin de pouvoir accoster ta station de recharge.
Le plus simple, si ton robot évolue en intérieur, c'est que ta station émette un rayon infrarouge modulé(faut qu'il soit un minimum directif) que ton robot puisse voir via un ou deux récepteur(s) IR genre TSOP. Quand ton robo veux se recharger, il recherche ce signal et, une fois qu'il l'a trouvé, avance sans perdre le signal (donc avance vers la station). Quand ton robot détecte un obstacle alors il sait qu'il est tout prés de la station... plus qu'a faire un demi tour pour se recharger (puisqu'en lisant ton post tu sembles dire que les connecteurs de recharge de ton robot seraient à l'arrière de celui-ci) et reculer pour entrer en contact avec la station.
Fait des recherches avec les mots suivants en français(en anglais) : balise(beacon), accostage(docking)etc.
Ce processus est abordé ici par exemple.
J'en parle aussi un peu sur mon site puisque je travail là dessus pour mon robot d'exploration. Sans vouloir te décourager c'est un chemin semé d'embuche (du moins dans mon cas puisque mon robot évolue en extérieur, ça complique un peu) cependant c'est très intéressant à étudier.
Ça dépend des moyens mis en oeuvre...Quel est le coût ?
N'oubliez jamais que "Ban Ki-moon n'attrape pas mousse"
#3
meteor64
-
- Membres
- 57 messages
Membre
Posté 12 avril 2014 - 10:57
Bonjour, merci pour ta réponse. Désolé mais le robot est radiocommandé c'est un robot fait pour être utile donc au niveau balise sa va, après il évolue la ou son pilote le mène le seul truc qui membête c'est au niveau des cartes de recharge je ne sais pas trop quoi prendre. Je part un peut H.S. mais comment as tu fait le canon E.M. car cela m'intéresse fortement.
#4
transistance
-
- Membres
-
- 411 messages
Membre passionné
Posté 12 avril 2014 - 12:19
Désolé mais le robot est radiocommandé c'est un robot fait pour être utile donc au niveau balise sa va
J'ai du mal à comprendre donc je crois qu'on part en quiproquo... Expose clairement ce que tu veux faire et comment tu veux le faire.
N'oubliez jamais que "Ban Ki-moon n'attrape pas mousse"
#5
levend
-

- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 12 avril 2014 - 07:22
Bonsoir,
Pourquoi enlever tes accus, fais comme en modélisme, une prise donnant sur l'extérieur du robot sur laquelle tu branches ton chargeur, ce sera plus simple vu qu'il est télécommandé.
Pourquoi enlever tes accus, fais comme en modélisme, une prise donnant sur l'extérieur du robot sur laquelle tu branches ton chargeur, ce sera plus simple vu qu'il est télécommandé.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
#7
levend
-
- Membres
-
- 5â¯572 messages
Pilier du forum
- Gender:Male
- Location:Vendée
Posté 12 avril 2014 - 08:05
Pourquoi veux-tu mettre une carte dans ta station ?
Tu fais quelque chos comme ça :
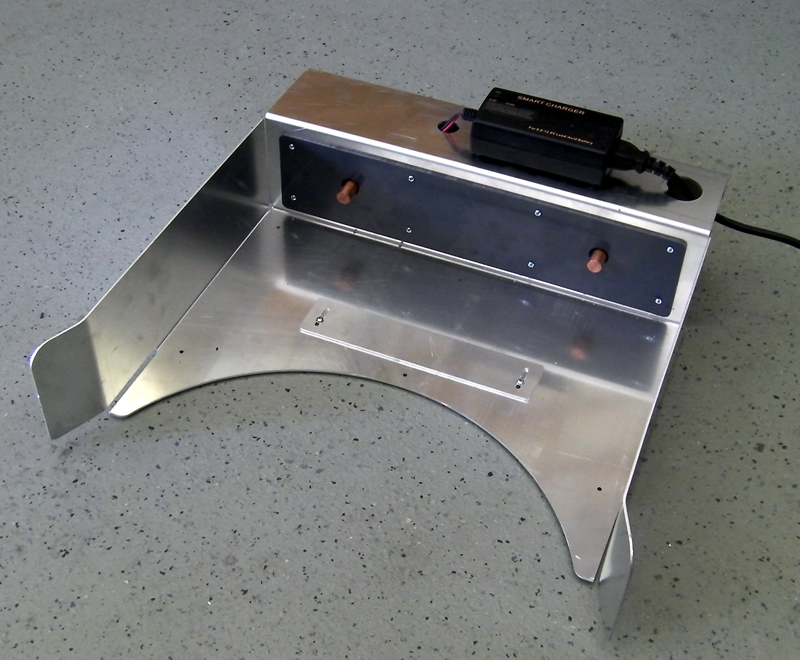
Tu mets des contact à l'extérieur de ton robot et ton chargeur dans la station relié aux deux contacts (de la station) et quand ton robot viendra en contact, il se rechargera.
Tu fais quelque chos comme ça :
Tu mets des contact à l'extérieur de ton robot et ton chargeur dans la station relié aux deux contacts (de la station) et quand ton robot viendra en contact, il se rechargera.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




