bonjour a tous, (un bail que je ne me suis pas co, mes projet avance relativement bien, meme si je ne peut y consacré tout le temps que j'aimerais.. bref..)
J'ai un problème sur mon hexapode, (comme beaucoup d'entre nous), j'ai conçu un nouveau chassie, et une nouvelle maniére d'associé les pattes et les servomoteur, cependant l'une des méthode que j'emploie n'es pas aussi efficace que prévu..
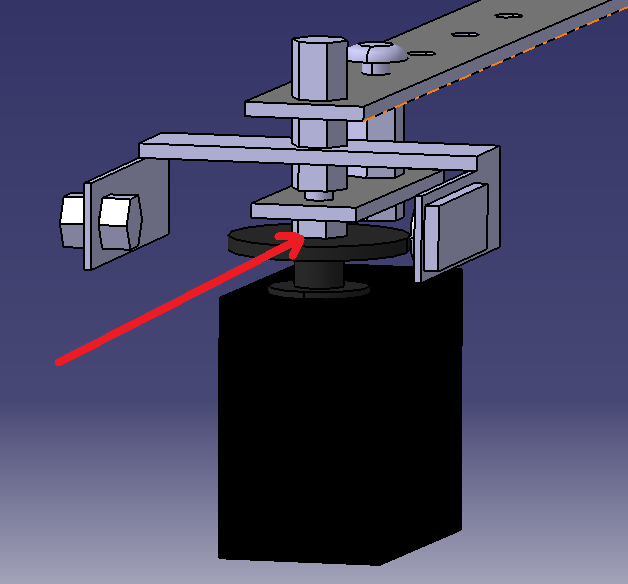
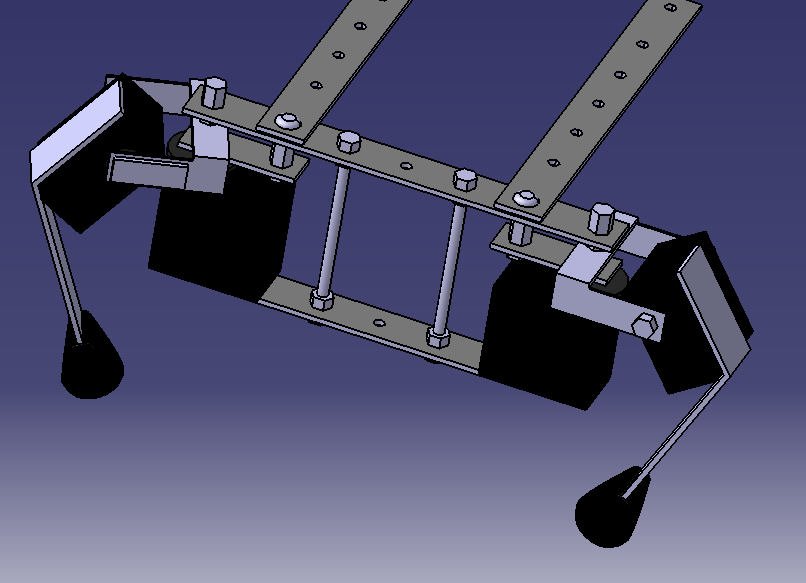
voila, a quoi ressemble ma fixation, en fait, c'est une tige filté vissé de quelques millimètre dans le palonnier, et collé a la superglue, ce systeme suffit pour faire bouger les pate, mais évidement, des qu'il y a un peu de force appliqué, l'axe se desserre et ça tourne en partie dans le vide.
je cherche donc une solution pour "lié" l'axe d'un servo a celui d'une tige filté.. si quelqu'un a des sugestion.
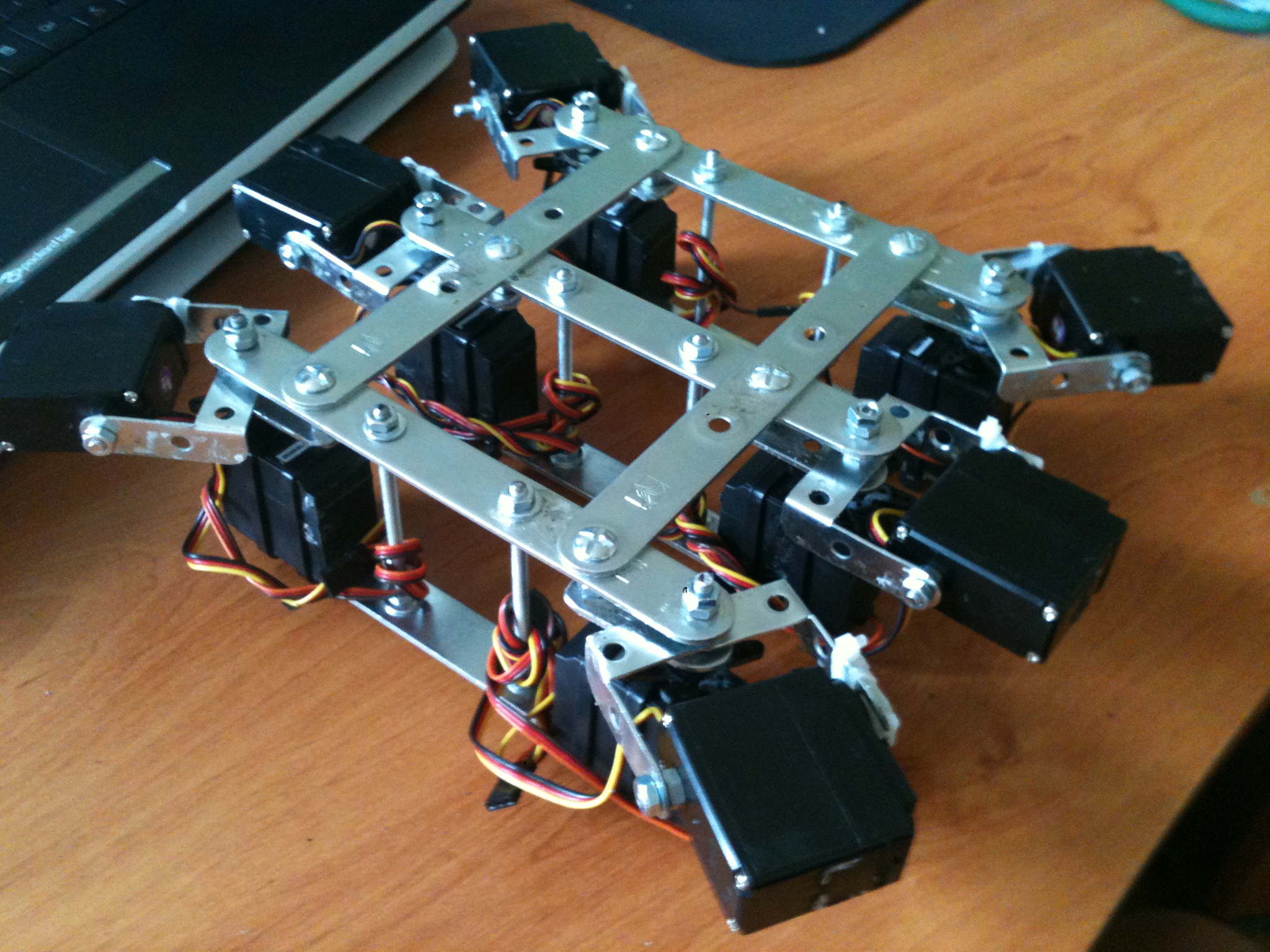
EDIT: au passage vidéo de l'hexa (avant que l'une des pattes se desserre justement) :
Je comprends pas tu n'utilise même pas le palonnier ?!
C'est pourtant pas compliqué de fixer un axe sur un servo il te suffit d'avoir une pièce de couplage du style moyeu de roue lynxmotion, d'un côté tu le vis sur le palonnier et de l'autre tu y insert ta tige fileté bloquée via une vis de pression.
Après c'est plus que bof comme solution et d'office ça n'a rien de durable.
Tous les robots hexapodes ou autre bras robotique avec servo fixent leurs bras de la même manière, une pièce en U reliant le palonnier et le deuxième axe du servo.
skyhack.
" Monsters are real. Ghosts are real too. They live inside us and sometimes they win." -------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... " -------------------------------------Stephen Hawking----------------------------------------------------
je cherche donc une solution pour "lié" l'axe d'un servo a celui d'une tige fileté.. si quelqu'un a des suggestion.
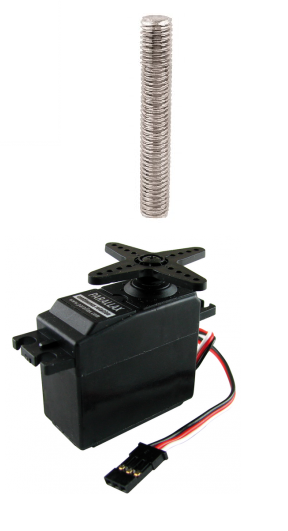
1) Ta "pièce idéale" prend la forme d'un disque de diamètre identique à ton palonnier et de quelques millimètres d'épaisseur (~5mm), percé en son centre au diamètre de ta tige. Ce trou, destiné à accueillir la tige, doit donc être fileté à l'aide d'un taraud approprié. Il faudra aussi faire 4 perçages sur l'extérieur du disque afin de le fixer au palonnier du servomoteur.
La tige filetée sera maintenue dans le disque taraudé par un contre-écrou (de préférence un écrou frein type nylstop).
2) Si tu ne peut pas tarauder , tu peut imaginer une alternative en perçant à un diamètre légèrement supérieur à celui de ta tige au centre du disque et en soudant un écrou approprié dessus.
Dans la version 1) qui est la plus "pro", le disque peut être réalisé en alu, en nylon ou ce que tu veux. Dans la version 2) qui la plus accessible à tout bricoleur, le disque doit être en métal. Si tu n'a pas de poste à souder, tu peut faire ton disque en circuit imprimé simple face, l'écrou (après avoir été bien poncé et bien chauffé) pourra y être soudé à l'étain sans problème.
En espérant que ces explications soient assez parlantes.
En soit dans les règles de l'art tu fais ça comme fixation, palonnier, pièce en U, double axe, barre de renfort inter-servo.
Ou alors avec des servo ROBONOVA de hitec tu dispose directement du double axe ce qui te permet un assemblage propre, net et durable.
skyhack.
Car oui on attache jamais un servo d'un côté seulement sinon porte à faux assuré, servo qui force et usure précoce.
Certain servo sont eux attaché uniquement d'un côté mais ils sont fait pour et ont un arbre sur roulement spéciaux permettant ce genre de fixation.
" Monsters are real. Ghosts are real too. They live inside us and sometimes they win." -------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... " -------------------------------------Stephen Hawking----------------------------------------------------
Merci transistance, je pense a ta solution depuis quelque temps, c'est le même principe que j'ai utiliser pour associé les servo moteur aux roue de mon robot d'exploration. C'est surement la meilleur solution, j'voulais simplement verifié qu'il y en ai pas d'autre
shyhack, jhésite a te répondre, j'ai regarder un sujet sur le quel tu repondu a plusieurs reprise, mais tu semble être un gros troll..
si tu avait regarder un peu mieux, avant de dire que ma solution es a chier, tu aurait vu qu'en aucun cas mon servo moteur est en porte a faux..
et la solution du U pour la parti horizontal ne me convenait pas..
je vais reprendre la réponse d'un autre, sur un autre sujet, quand tu présentera quelque chose, tu pourra te permettre de sortir des critique acerbe...
J'attends avec impatience tes plus plates excuses à mon égards car me faire traiter de troll pour être celui préposé aux topic mécanique depuis 2009 et qui a aidé bon nombre d'amateur comme toi en passant des heures entières à modéliser des solution technique aussi diverses que variées, je trouve ça blessant et humiliant surtout de quelqu'un longtemps absent sur le forum !
Je suis plus que choqué par un tel commentaire d'un membre de ce forum pourtant passionné au vue du nombre de commentaire.
Après si tu pense que je n'ai pas compris ton problème peut-être est-ce aussi du au manque d'explication suffisante de ta part car désolè mais CATIA c'est bien mais encore faut il modéliser clairement les choses car là on voit que dalle ! ça fait des lustres que je fais du CATIA donc je sais reconnaître une modélisation explicite d'une autre.
Maintenant tu peux prendre ta solution et faire ce qui te chante avec de toute façon j'en ai maintenant plus rien à faire de ton robot si c'est se faire claquer la gueule en direct pour avoir aidé de son plein gré.
" Monsters are real. Ghosts are real too. They live inside us and sometimes they win." -------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... " -------------------------------------Stephen Hawking----------------------------------------------------
Admettons je me suis laisser emporté, mais j'ai pas aimer t'a façon (voulu ou non) de me prendre de haut... et de me faire comprendre que mon hexapode ne vaut pas un cloue et que je devrait le reprendre a zéro avec tes solution, (ce qui revient a racheter une série de servomoteur et de pièce mécanique relativement coûteuse, ce que je ne peut me permettre..)
Alors, je te prie de m'excuser, tu n'est peut être pas un troll, seulement un chouilla condescendant..
car ma solution n'est peut être pas "pro", mais elle a le mérite de répondre a mes exigence fonctionnel (taille, rotation ect..) et de ne pas avoir de porte a faux, justement pcq j'y ai plus réfléchi que pour m'a version précédente..
enfin, je sais que ne suis pas un pro sur catia, j'ai eu une rapide formation, et je m'en sert simplement pour dessiner mes pièces, et vérifié l'assemblage de mes réalisation. Alors sur ma pièce jointe j'ai enlever un gros morceau pour que ca soit plus lisible..
J'ai tendance à dire directement les choses donc ça peut porter à confusion. />/>
Pour ta question de fixation, le fait est que j'étudie dans la mécanique et quand on voit une telle fixation on ne peut que se dire que ça ne va pas.
Pour ma part je n'ai jamais vu une articulation aussi compliqué pour pas grand chose au final.
Pourquoi ne pas avoir fait exactement comme toutes les articulations des robots lynxmotion comme précisé ultérieurement car là à dire vrai je n'arrive vraiment pas à comprendre la logique.
Un simple châssis pour servo (à fabriquer pas compliqué) puis une pièce en U permettant de relier les 2 axes du servo tout simplement.
Tu n'a pas besoin de passer beaucoup de temps sur ça mais au moins ça te permettra d'avoir une base solide et fiable pour te pencher sur la programmation, car si ça n'est pas le cas tu ne va que tourner en rond car ton robot va constamment avoir des défauts mécaniques du fait d'une conception pas assez fiable.
Bref fiable/solide/durable = simple, pas la peine d'essayer de réinventer la roue pour un hexapode qui reste quand même la réalisation LA plus appréciée des amateurs de robotique donc les exemples ne manquent pas sur internet sur quoi se baser.
Je vois que tu fais ton châssis avec des pièces de meccano, il y a vraiment de quoi faire quelque chose de solide avec ce genre de pièce surtout chez meccano, les pièces particulières ne manquant pas, elles se commandent très bien au cas où.
Donc désolè encore si je semble te choquer mais avant toute chose essaie de réfléchir à une conception mécanique simple et solide afin de ne pas être ralentit encore par des problème mécanique récurent.
Demande je suis toujours dispo si tu veux des idées ou alors que je te propose un modèle modélisé (oui car les images que j'ai mis sont de moi entre autre), car question robot à patte c'est pas nouveau pour moi.
" Monsters are real. Ghosts are real too. They live inside us and sometimes they win." -------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... " -------------------------------------Stephen Hawking----------------------------------------------------
Tu n'a pas besoin de passer beaucoup de temps sur ça mais au moins ça te permettra d'avoir une base solide et fiable pour te pencher sur la programmation, car si ça n'est pas le cas tu ne va que tourner en rond car ton robot va constamment avoir des défauts mécaniques du fait d'une conception pas assez fiable.
justement, mon but est de plutôt me pencher sur la progra (qui est déjà pas mal avancé), donc je voulais un chassie basique, même si il n'est pas d'une folle précision.
Je vois que tu fais ton châssis avec des pièces de meccano, il y a vraiment de quoi faire quelque chose de solide avec ce genre de pièce surtout chez meccano, les pièces particulières ne manquant pas, elles se commandent très bien au cas où.
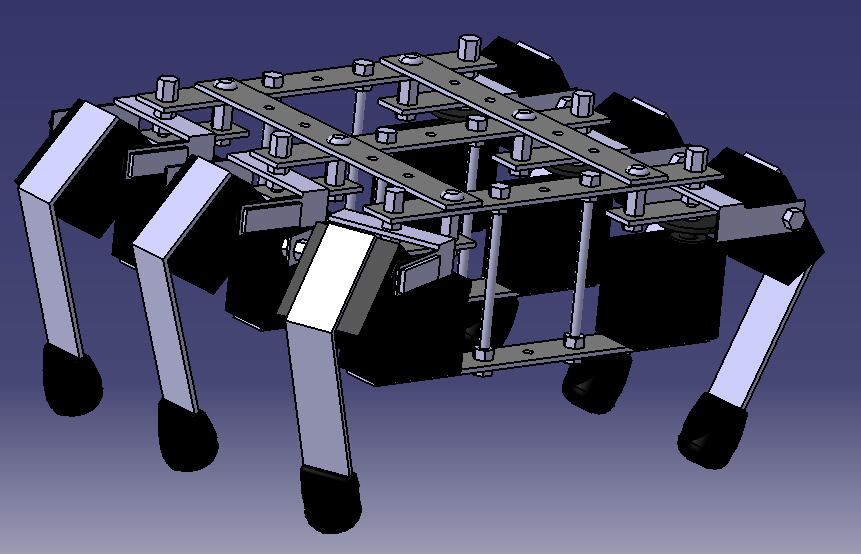
en fait ce sont pas des mécano mais les barre d'acier que l'on trouve au rayon quincaillerie de n'importe quel brico, justement pour fabriquer un chassie sans rien avoir a commander, je modifie les pièce selon mes besoin.
voila donc pour palier le porte a faux sur l'axe horizontal, je l'ai enclaver entre deux plaques exactement comme j'avais sur mon robot d'exploration 4 roues motrices (voir PJ)
Ce qui me gène c'est que les servo sont mobile dans tes solution, donc si le chassie et conçu pour, pas de problème c'est surement mieux, mais dans mon cas j'essai de conserver une certaine échelle, et un certain désigne or ma solution me permet un gain de place.
bref la question nétait pas vraiment la, même si je trouve très classe la conception de certain hexa que je vois sur internet, y compris tes réalisation, deja j'aurais aimer faire des pattes a 3 DL mais j'ai pas le moyens donc peut être un jour..
sinon je t'invite a me brûler pour hérésie en regardant cette vidéo () la 1ere version de mon hexapode qui pour le coup était vraiment mal conçu, très lourd, et des porte a faux de toute part!
Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 18 juin 2014 - 01:18
Bon je suis content de ne pas avoir eu à modérer les propos de tout le monde et que tout soit rentrer dans l'ordre entre gens civilisé ! Je vous félicite
La paix, le respect, la bonne entente et la bonne humeur sont de rigueur sur ce forum
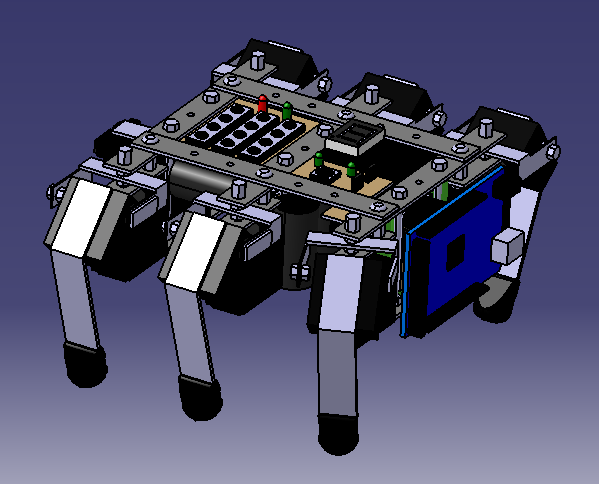
Pour le reste je trouve que l'hexapode avec tout ces bouton et ce boitier noir a une tête bien sympathique. Comment as tu réalisé le boitier qui fait office de corps de l'hexapode ?
Bon je suis content de ne pas avoir eu à modérer les propos de tout le monde et que tout soit rentrer dans l'ordre entre gens civilisé ! Je vous félicite />
La paix, le respect, la bonne entente et la bonne humeur sont de rigueur sur ce forum />
Pour le reste je trouve que l'hexapode avec tout ces bouton et ce boitier noir a une tête bien sympathique. Comment as tu réalisé le boitier qui fait office de corps de l'hexapode ?
si tu parle de m'a première version, la "coque" a était faites avec des bout de chambre a air de tracteur, le seconde version, a terme ressemblera aussi a ça.
Bon tu vas faire quoi au final ? revoir ta base mécanique ou essayer tant bien que mal dans cette voie là ?
" Monsters are real. Ghosts are real too. They live inside us and sometimes they win." -------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... " -------------------------------------Stephen Hawking----------------------------------------------------
essayer tant bien que mal dans cette voie, quand ce problème d'axe sera régler il sera très bien. Et surtout je n'ai ni le temps ni les moyen pour le moment de refaire une troisième fois mon hexapode.