
Bonjour à tous,
J’aimerai partager ma petite expérience avec d’autres personnes qui rêvent comme moi de réaliser un gyropode.
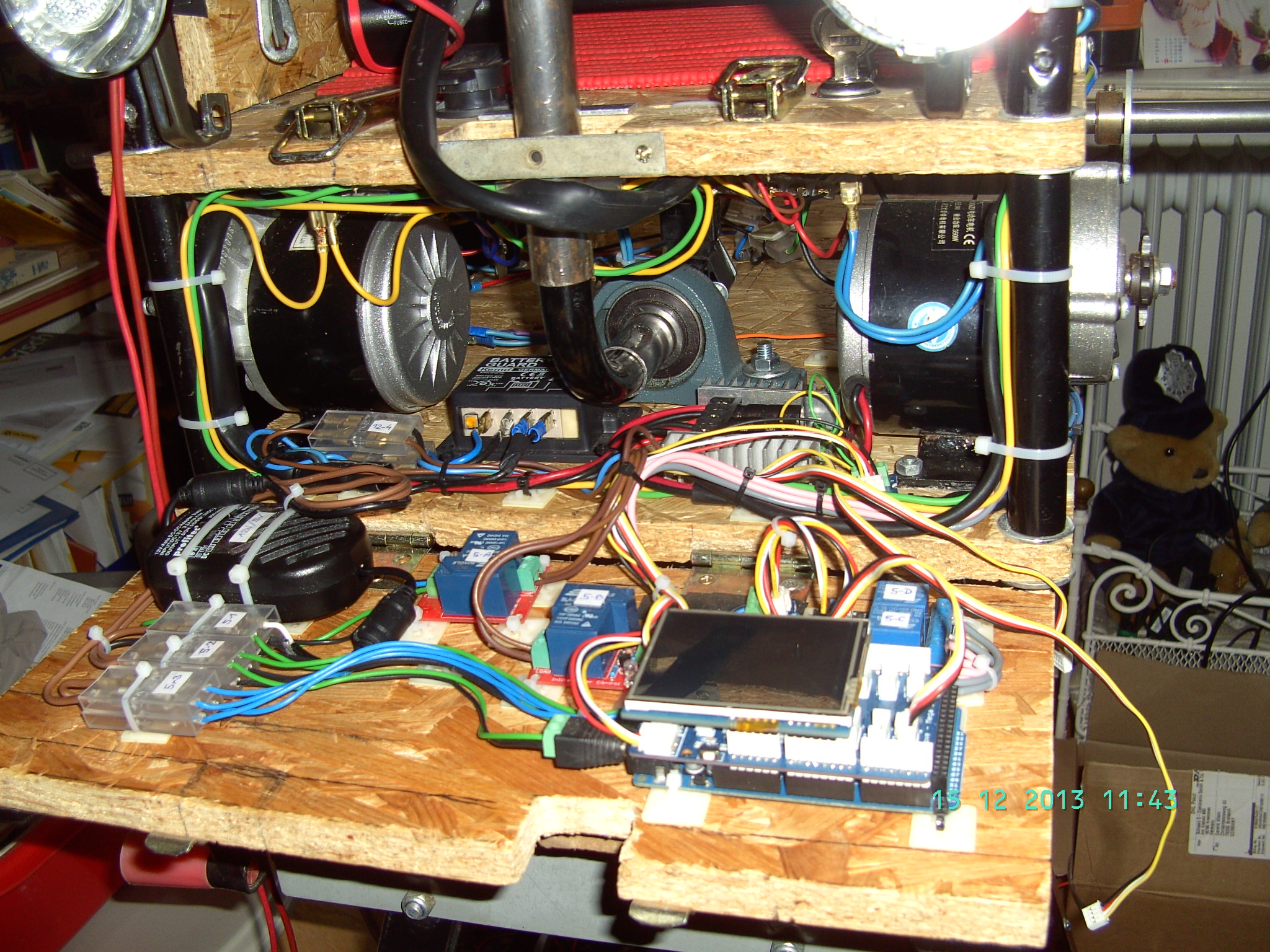
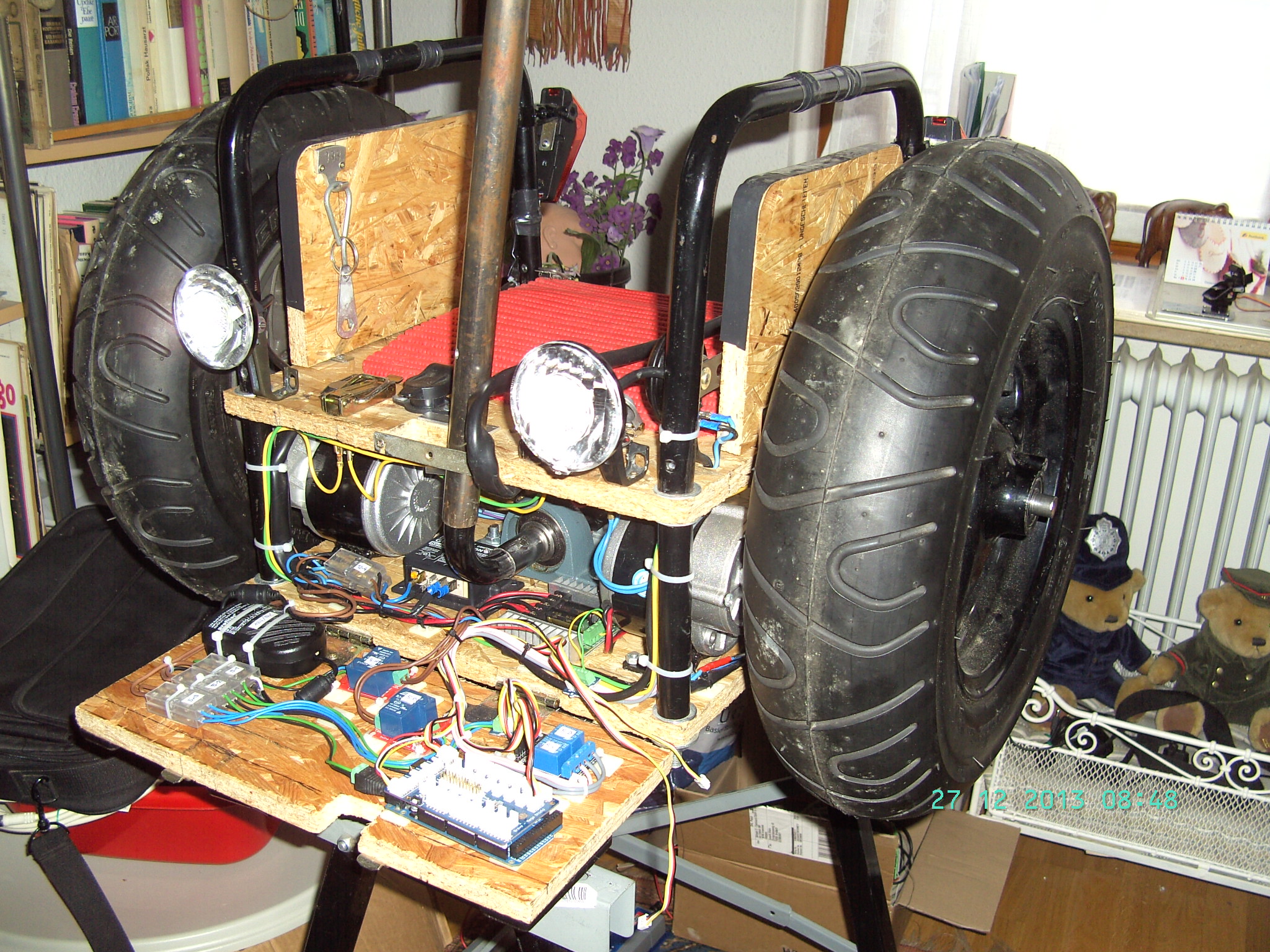
Voilà pas mal de temps je mettais lancé dans la réalisation d’un gyropode. Je dois avouer qu’après un peu plus de deux années le projet n’est toujours pas finalisé. La difficulté est toujours la stabilisation du système que je n’ai pas pu résoudre de manière efficace. Apres une pause j’ai repris le projet et surtout tout remis à plat. J’ai abandonné provisoirement la partie interface graphique (2.8 inch TFT-LCD + Touchscreen + SD-card, pas nécessaire pour le moment). Entretemps la technologie a aussi beaucoup évoluée.
Le système est maintenant composé d’une carte arduino mega r3, une centrale IMU 10 DOF (MPU6050), deux moteurs MY1016Z3 (24V 350W) avec un contrôleur sabertooth 2x25A, 2 batteries 12V. Sur l’ancien système j’avais trois capteurs indépendants accéléromètre gyroscope et magnétomètre. (Problème d’alignement des capteurs et beaucoup de calculs pour réaliser la fusion)
Pour la centrale j’ai donc porté mon choix sur un MPU6050 (accéléromètre 3 axes, gyroscope 3 axes) qui embarque l’application DMP (InvenSense), un magnétomètre 3 axes HMC5883L. Le tout dans un même boitier et un baromètre MS5611 en plus sur la platine. L’avantage de cette centrale est l’application DMP embarquée (Digital Motion Processor, attention cette application n’est pas en open source !). Cette application permet de faire d’une manière relativement simple, la fusion entre les différents capteurs (accéléromètre, gyroscope, magnétomètre).
Pour la partie roulante j’ai deux roues de scooter (120/90-10) sur lesquelles j’ai remplacé le disque frein par un plateau 44 dents. La sortie réductrice du moteur 24V a une 10 dent. Les deux moteurs sont contrôlés par un sabertooth 2x25A (peut-être un peu juste).
La direction est assurée par un potentiomètre +/- 45 degrés.
J’attends vos commentaires avec impatience.
Bonne soirée à tous.

#1

-
- Membres
- 3 messages
Nouveau membre
Posté 05 août 2014 - 06:40
#2
-

- Administrateur
-

- 10â¯218 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 08 août 2014 - 09:20
 L'ensemble me semble correctement dimensionné
L'ensemble me semble correctement dimensionné Sur quel phase en es tu maitenant du coup ? Tu estime que pour la V1 toute l'électronique et la mécanique est mise en place ? Et il ne te reste plus que du code ? Ou certaines choses sont encore à reprendre ?
Bon courage pour la suite
Si tu as des besoins n'hésite pas à poser des questions
à bientôt !
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#3
-
- Membres
- 3 messages
Nouveau membre
Posté 08 août 2014 - 10:08
Merci pour ta réponse. Actuellement je fais des essais avec le mpu6050 et la mega. Jai branché deux petits servos pour voir si cela marche. Il me semble que jai un problème pour intégrer la commande de direction qui se fait par un potentiomètre. Le but est soit de faire accélérer ou de ralentir une roue pour effectuer le virage. Il y a aussi un problème de sensibilité du mpu. L'amplitude du mouvement de celui-ci me semble trop grande pour actionner les servos?
lorsque j'aurai terminé les essais je remplacerai les servos par le sabertooth.
voici le code que j'utilise actuellement.
#include <Servo.h>
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
#include <TimedAction.h>
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
// Steering pot
int steeringPin = A8; // select the input pin for the potentiometer
uint16_t steeringValue;
uint16_t offsetLeft;
uint16_t offsetRight;
//
//Servo motor;
Servo left_Drive;
Servo right_Drive;
//
MPU6050 mpu(0x69);
//
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
//
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
//
float gyroPos_Roll = 0;
float gyroPos_Pitch = 0;
//
int DrivePos_Left = 1500;
int DrivePos_Right = 1750;
//
#define LED_PIN 13 // (Arduino is 13, Teensy is 11, Teensy++ is 6)
boolean blinkState = false;
//
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady(){
mpuInterrupt = true;
}
//
TimedAction steering_Task = TimedAction(100, steering_Update);
//
void setup() {
// initialize serial communication
// (115200 chosen because it is required for Teapot Demo output, but it's
// really up to you depending on your project)
Serial.begin(115200);
//
left_Drive.attach(10, 800, 2200); // pos.min. max servo(roll)
right_Drive.attach(11, 1500, 1800); // pos. min. max servo(picht)
//
left_Drive.writeMicroseconds(DrivePos_Left);
right_Drive.writeMicroseconds(DrivePos_Right);
//
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
//
// initialize device
Serial.println(F("Initializing I2C devices..."));
mpu.initialize();
//
// verify connection
Serial.println(F("Testing device connections..."));
Serial.println(mpu.testConnection() ? F("MPU6050 connection successful") : F("MPU6050 connection failed"));
//
// load and configure the DMP
Serial.println(F("Initializing DMP..."));
devStatus = mpu.dmpInitialize();
//
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
//
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
// turn on the DMP, now that it's ready
Serial.println(F("Enabling DMP..."));
mpu.setDMPEnabled(true);
//
// enable Arduino interrupt detection
Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0 , dmpDataReady, CHANGE);
mpuIntStatus = mpu.getIntStatus();
//
// set our DMP Ready flag so the main loop() function knows it's okay to use it
Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
//
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
// ERROR!
// 1 = initial memory load failed
// 2 = DMP configuration updates failed
// (if it's going to break, usually the code will be 1)
Serial.print(F("DMP Initialization failed (code "));
Serial.print(devStatus);
Serial.println(F(")"));
}
//
// configure LED for output
pinMode(LED_PIN, OUTPUT);
}
//
void loop(){
//
// horizon();
// if programming failed, don't try to do anything
if (!dmpReady) return;
//
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
//
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
//
// get current FIFO count
fifoCount = mpu.getFIFOCount();
//
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
Serial.println(F("FIFO overflow!"));
// otherwise, check for DMP data ready interrupt (this should happen frequently)
}else if (mpuIntStatus & 0x02){
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
//
steering_Task.check();
//
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
//
gyroPos_Pitch = (ypr[1] * 25); // y (Pitch)
//
DrivePos_Left = DrivePos_Left + gyroPos_Pitch + offsetLeft;
if(DrivePos_Left < 800) DrivePos_Left = 800;
else if (DrivePos_Left > 2200) DrivePos_Left = 2200;
left_Drive.writeMicroseconds(DrivePos_Left);
Serial.print("Drive left : ");Serial.println(DrivePos_Left);
Serial.println("");
Serial.print("Steering left : ");Serial.println(offsetLeft);
Serial.println("______________________");
Serial.println("");
//
DrivePos_Right = DrivePos_Right + gyroPos_Pitch + offsetRight;
if(DrivePos_Right < 1500) DrivePos_Right = 1500;
else if (DrivePos_Right > 2000) DrivePos_Right = 2000;
right_Drive.writeMicroseconds(DrivePos_Right);
Serial.print("Drive right : ");Serial.println(DrivePos_Right);
Serial.println("");
Serial.print("Steering right : ");Serial.println(offsetRight);
Serial.println("______________________");
Serial.println("");
//
blinkState = !blinkState;
digitalWrite(LED_PIN, blinkState);
}
}
//
void steering_Update(){
steeringValue = analogRead(steeringPin); // 0 - 1023
//
if (steeringValue < 512){
offsetRight = 0;
offsetLeft = map(steeringValue, 0, 511, 250, 0);
}else if (steeringValue >= 512 || steeringValue <= 1023){
steeringValue = steeringValue - 512;
offsetLeft = 0;
offsetRight = map(steeringValue, 0, 512, 0, 250);
}
}
#4
-

- Membres
- 4 messages
Nouveau membre
Posté 03 septembre 2014 - 10:40
Je viens juste de m'inscrire sur le forum.
J'ai le même type de projet que toi mais je ne suis pas aussi avancé dans la partie mécanique.
Lis ma présention sur le forum pour avoir ton avis, si j'ouvre un topic spécifique.
Mon idée est de mettre des photos pas à pas de la construction jusqu' à la finalisation du projet ( 3 mois, 6mois,.. à voir).
Je t'envoie un lien d'un forum que je lis avec assiduité pour la partie arduino.
J'ai été impressioné par le travail fourni. J'ai fait quelques tests et vraimment les developpements sont tip top.
http://www.diyelectriccar.com/forums/showthread.php/ovaltines-segway-clone-89471.html
Bon tout est en anglais, mais à force on s'y fait.
Je ne sais pas si je pourrais être d'une grande aide pour toi mais le soutien moral est déjà une chose énorme.
Tiens nous informé de ton avancement.
A+
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




