Bonjour,
J'ai vu qu'il y avait un sujet avec un nom similaire mais il ne répond pas à mes questions.
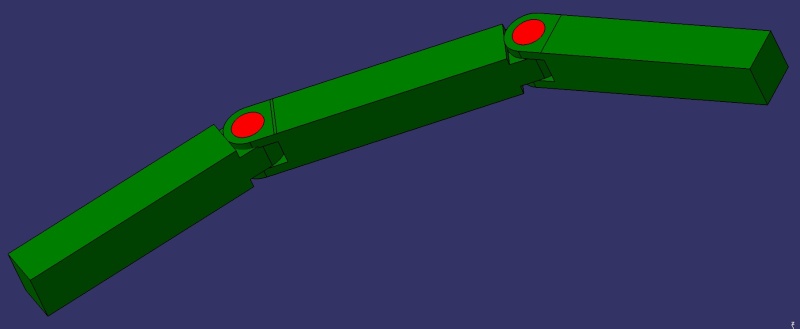
J'ai pour projet de concevoir un doigt robotique avec de la corde à piano, mais quelques questions théorique sur la mécanique me viennent en tête.
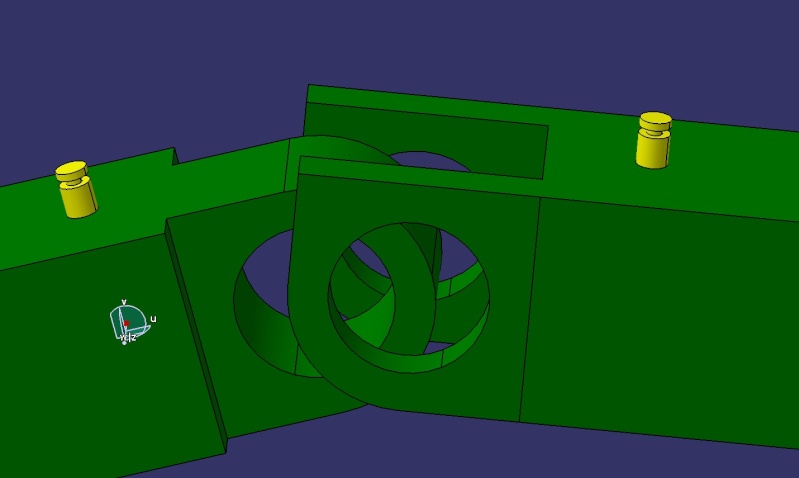
1) La corde à piano est attaché jusqu'au bout du doigt et relié à un servo à l'extèrieur du doigt. Le fait de tirer sur la corde va replier le doigt, mais quel type de mécanique permet ce genre de choses, il doit bien y avoir un système entre chaque articulation de doigts pour faire ça ?
2) Je souhaite que le doigt se remette en position initiale après l'articulation. Une chose que le servo + corde à piano ne peuvent pas gérer. Quel élément mécanique est mis en oeuvre pour effectuer cette opération ? Limiteur de couple sur chaque liaison pivot des phalanges ? Je ne sais pas.
3) Bref, quel procédé est mis en oeuvre pour effectuer la flexion du doigt + retour en position initiale ?
Je vous remercie d'avance de m'avoir lu.
Je posterai l'avancement de ce projet si cela vous intéresse.