Bonjour 
Je me lance enfin dans la réalisation d’un robot un peu plus sophistiqué et upgradable
Pour commencer, le robot sera en mesure de se déplacer de façon téléguidé sur des sols de types intérieurs (non chaotique) puis avec un mode autonome (évitement d’obstacles simple : murs, objets au sol…). Il présentera une autonomie d’alimentation de minimum une heure. Un mode nuit (allumage de diode lorsque la luminosité devient trop faible).
Il ne sera qu’une « base mobile » pour de futures améliorations auxquelles je réfléchis encore.
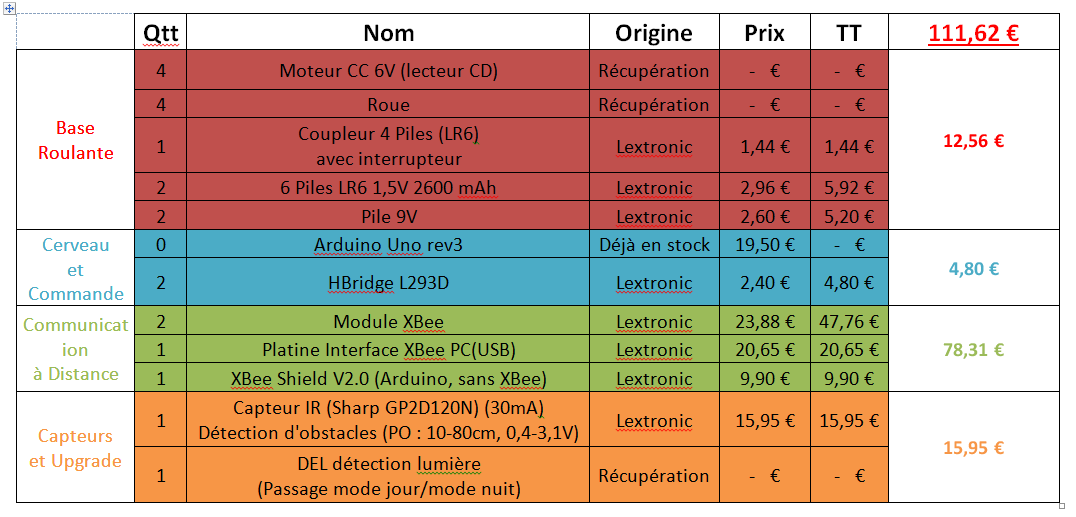
En ce qui concerne les pièces :
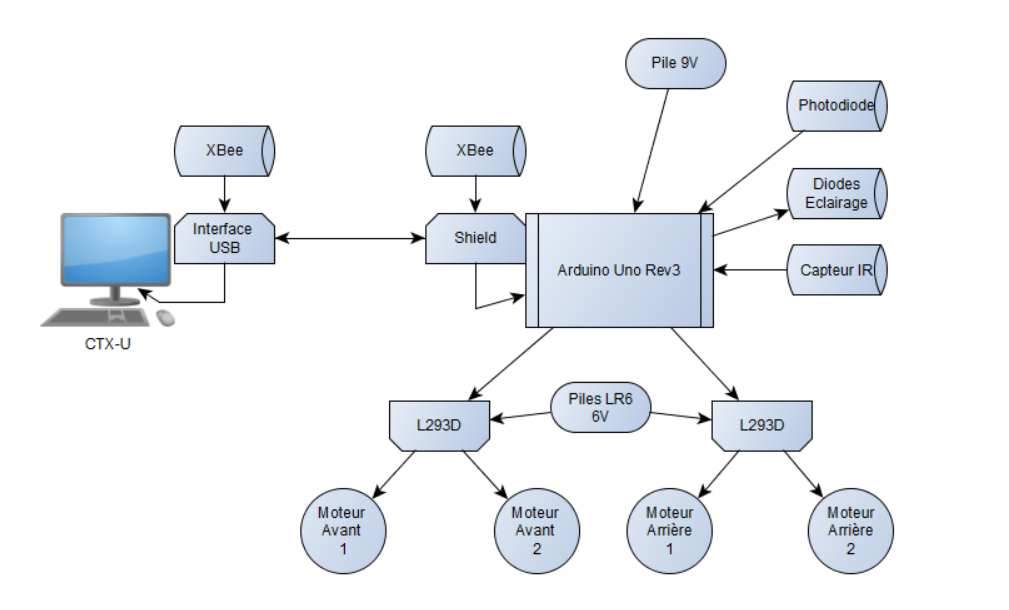
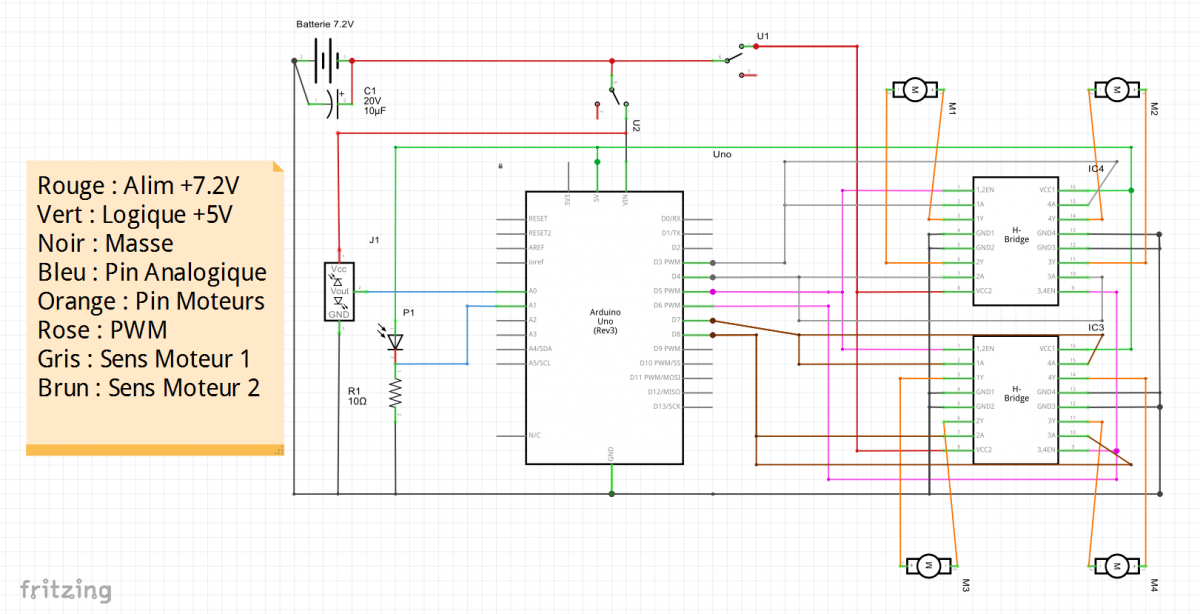
Toutes les informations et décisions seront collectées et prises via une carte Arduino Uno alimenté par une pile 9V avec un interrupteur branché sur la régulation de l’Arduino (Borne +5V et Ground).
Le contrôle des quatre moteurs CC 6V (récupérés sur vieux lecteur CD) en PWM sur la carte Uno sera fait par l’intermédiaire de deux puces H-Bridge L293D (intégrant deux ponts, max 600mA/canaux, avec déjà les diodes de roues libres (type Schotty)) et alimentées avec quatre piles LR6 (1,5V et 2600mAh).
La détection d’obstacle sera faite par un capteur IR : Sharp GP2D120N (portée théorique de 10 à 80 cm, sortie analogique 0,4—3,1V ; consommation moyenne de 30mA). La photodiode et les diodes d’éclairage sont des diodes récupérées à droite et à gauche (typiquement rouge/blanche soit 30mA/diodes).
La communication à distance sera faite au moyen de deux modules Bluetooth XBee (série1) (consommation 50mA/module), le premier relié à l’Arduino via un shield et la seconde reliée avec une carte d’interface USB pour l’ordinateur.
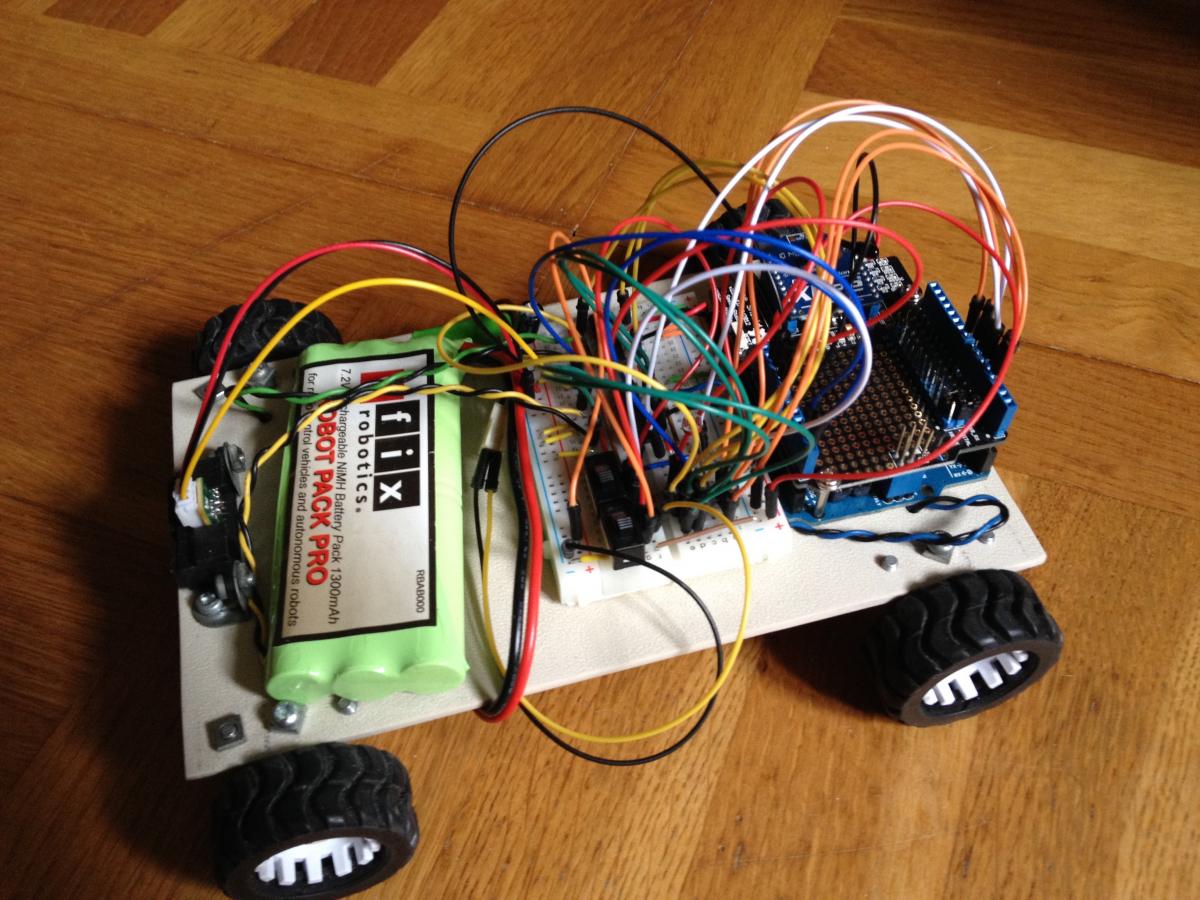
Le châssis sera en bois léger (épaisseur 2mm), les moteurs montés dessus avec les roues directement placées sur leurs axes.
J’ai déjà un peu réfléchi sur certains points mais toute remarque est la bienvenue :
- Quatre moteurs !? Un choix personnel ^^’

- Des roues montées sur les axes moteurs sans réducteurs !?
 Je veux une base qui roule de façon « correcte » et à coût réduit grâce à un peu de récup. Dès qu’il « tourne » bien, je verrai pour l’investissement de motoréducteur.
Je veux une base qui roule de façon « correcte » et à coût réduit grâce à un peu de récup. Dès qu’il « tourne » bien, je verrai pour l’investissement de motoréducteur.
La commande des pièces n’a pas été encore passé, elle sera fait fin de semaine prochaine je pense.
Je crois que j’ai dit tout ce à quoi j’ai réfléchi pour ce projet, j’attends avec impatience vos remarques