Le hic, c'est l'angle de vue de la cam, pas assez large
J'ai reçu une lentille de 3.6mm, ca va mieux, je doit encore recevoir celle de 2.8mm. Je me suis amuser a monter la cam sur le µX-plorer, c'est top !
Bon, au vu des finances actuelles Je laisse tomber la découpe laser. Je vais me débrouiller, et c'est tant mieux, ca économisera des roro. C'est pas compliquer, fait par mes soin, je m'en sort pour une soixantaine de roro, fait par une boite suivant les plans précédant, il y en a pour prés de 300e... Quand on voit des châssis tout prés sur roboshop a ce prix, ça fous un peu les boules .
Donc, il faut que je finisse mes roues, je devrai recevoir l'alu la semaine prochaine.
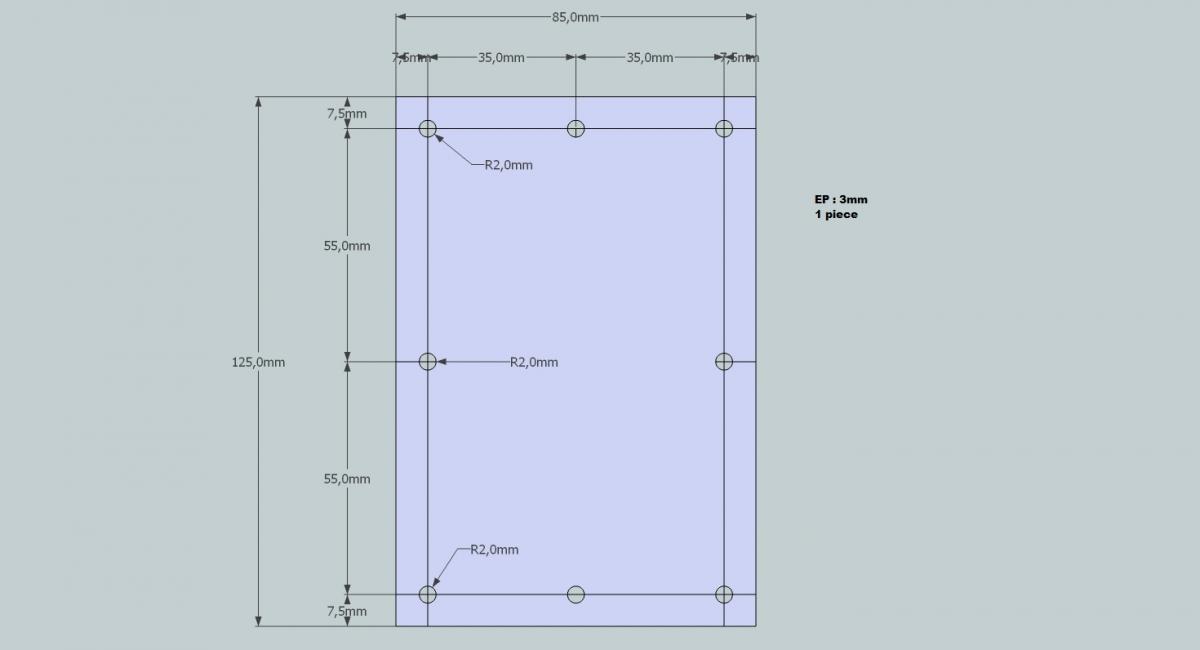
Pour l'instant je par sur une caisse de 8cm de haut, 45cm de long et 18 de large. Les morceaux d'alu pour les coter font 500mm de long, comme ça je fait mes trou d'emplacement pour les moteurs, et ensuite je verrai pour le design. L’épaisseur de 8mm (bien plus facile pour percé/tarauder dedans).
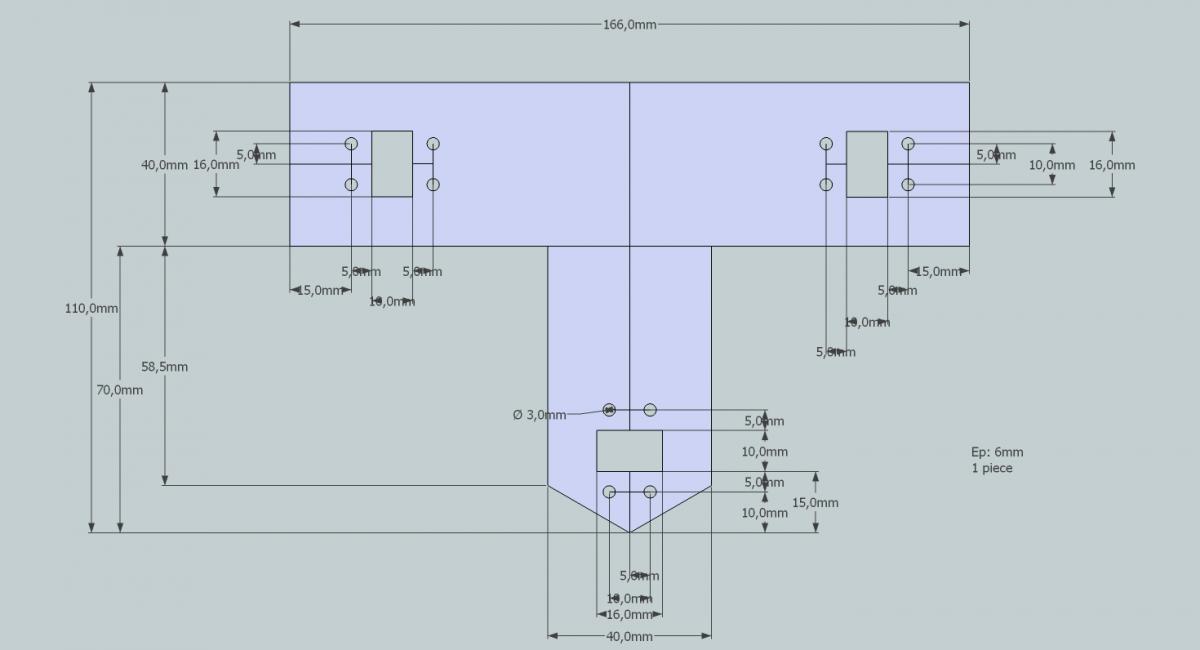
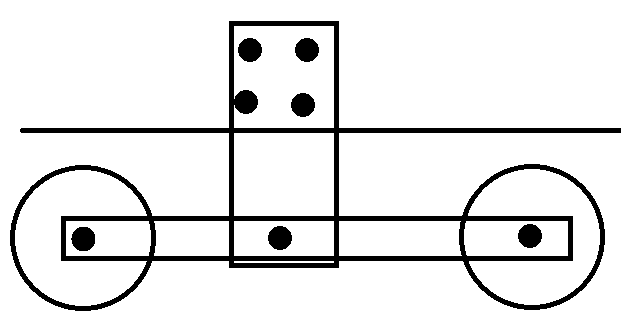
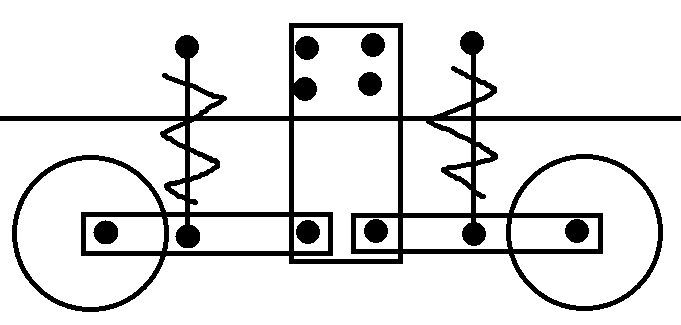
J'ai trouver pour faire mes suspension sans galéré . Il s'agit d'une jambe d'environ 50mm x 30mm dont 20 mm seront visse sur les flanc. Au bout, un axe de 6 sur lequel viendra 'un balancier' a 90° avec les roues au bout. En T si vous préférez .
Vous devez vous dire que je suis chiant de toujours changé d'idée, vous avez raison .