Bonjour à tous (à toutes) !
Je viens vous présenter définitivement mon robot pour le concours EuroBot 2015 (Suisse) 
Voilà, donc après avoir recueilli vos réponses à mes questions, je crois avoir tout pour (a peu près) bien faire et peut être passer les phases d'homologations lors de la coupe.
Voilà ce que je compte faire:
Pour gagner des points, il y a plusieurs choses à faire pendant le match qui dure 90 secondes. Il faut:
- Monter un spot pour l'éclairage de la salle de cinéma
- remplir du popcorn dans les bacs et amener des verres dans la salle
- baisser les claps entre chaque scène
- dérouler le tapis rouge
- Et pour finir, le plus glorieux, monter les marches de Cannes 
Plus précisément, voici le terrain.
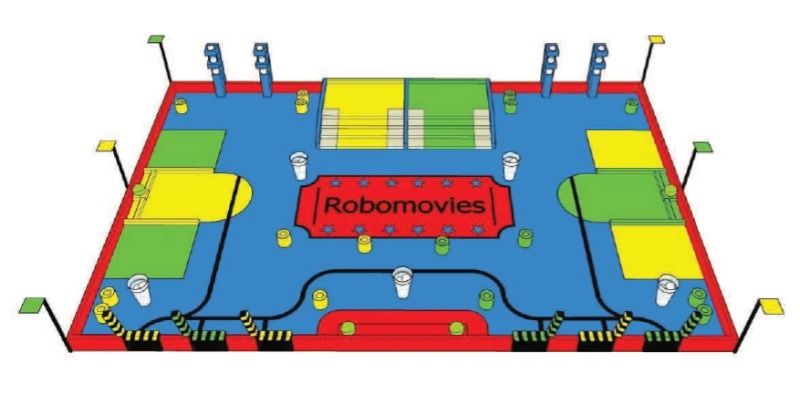
Je suis jaune, donc les petits plots jaunes sont à empiler les uns sur les autres et il faut mettre la grosse boule jaune (balle de tennis) sur le haut de la pile. Ceci représente le spot.
Les verres blancs sont à amener dans les zones de sa couleur
Les quatre distributeurs à "pop-corn" en bleus sont remplis de boules de polystyrène qu'il faut amener juste à coté de où on prend la balle de tennis
Il faut baisser les claps de sa couleur
Dérouler 2 tapis sur les marches
Et finir avec au moins un robot en haut des marches.
Voilà, vous avez à peu près les objectifs.
Maintenant place à mes idées...
Deux robots, un qui prend les verres et qui les amènes, et ensuite va à la chasse aux plots pour faire au moins un spot, et un autre qui va direct aux marches et qui déroule le tapis au fur et à mesure de sa montée.
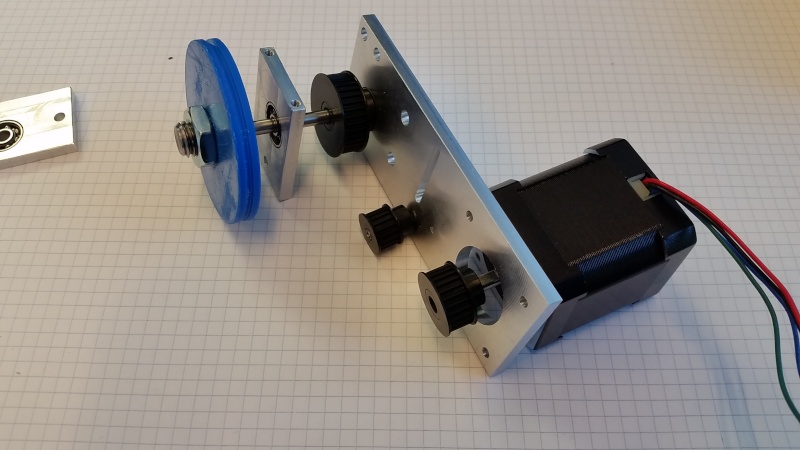
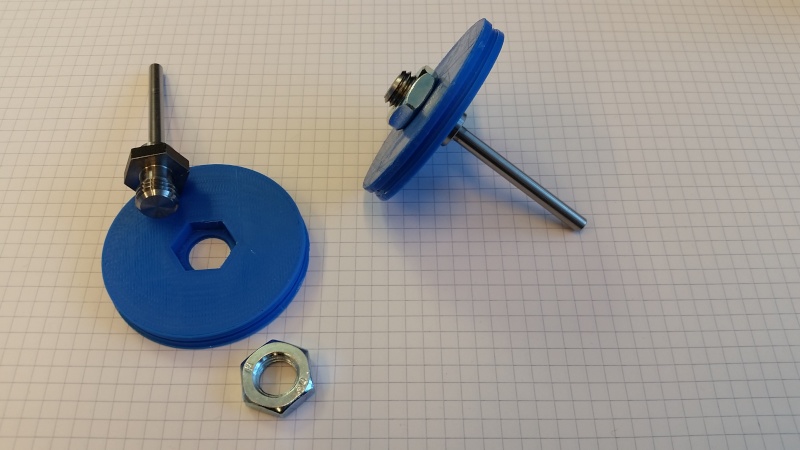
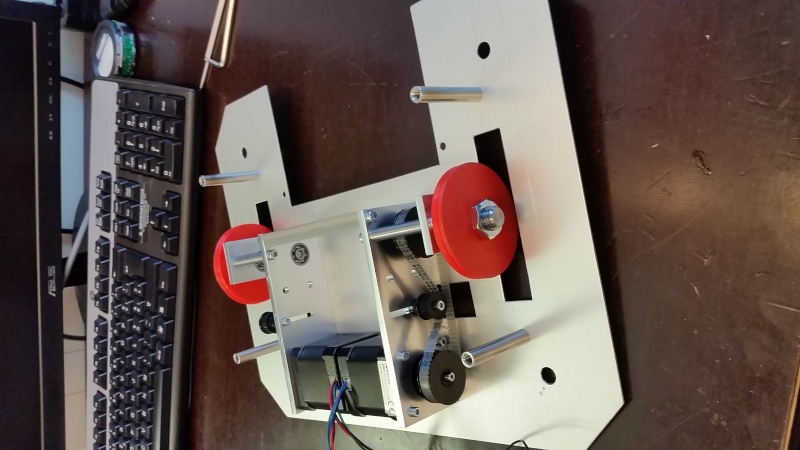
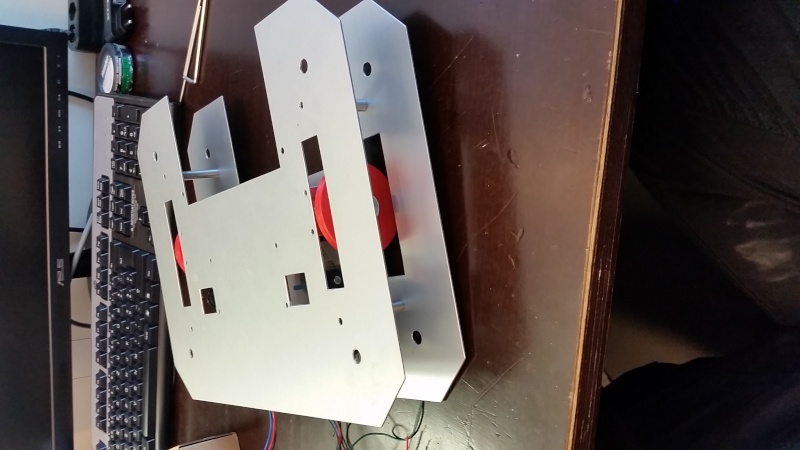
J'ai déjà une partie du 3D du robot principal ainsi que quelques pièces que les apprentis de chez moi ont réalisé.
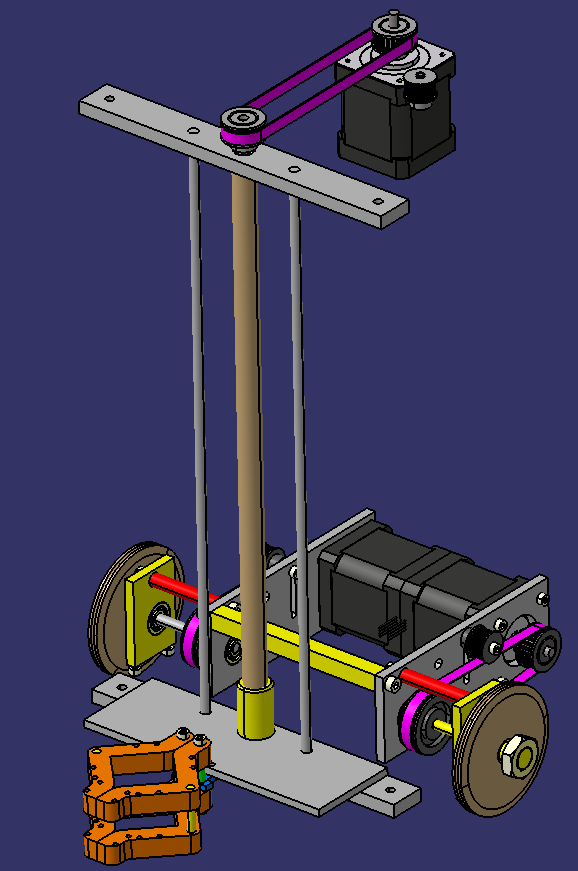
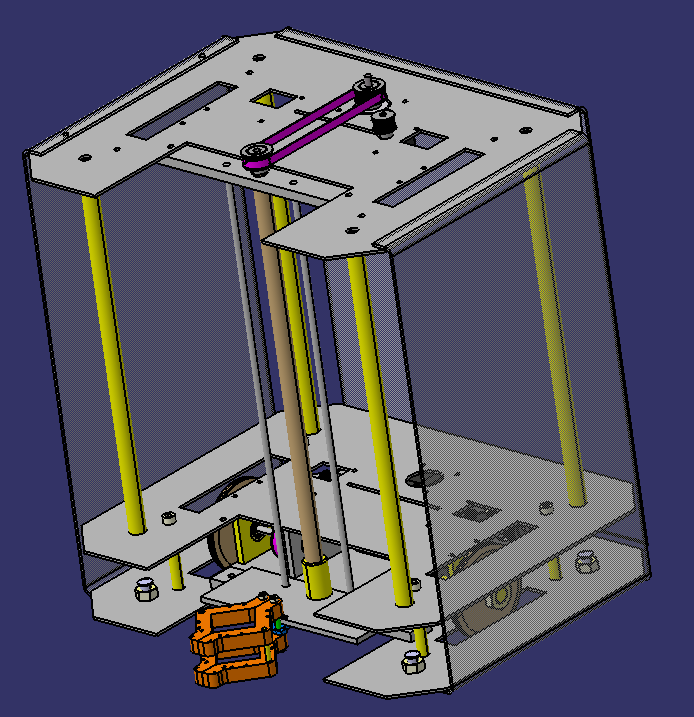
Les moteurs sont des moteurs pas-à-pas et il y aura un servomoteur type dynamixel qui gérera l'ouverture et fermeture de la pince.
Tout sera contrôlé via un Arduino et pour gérer le système de balises que je développe, un RPi s'en occupera.
Pour les balises, ces modules qui servent de "GPS" pour connaître en tout temps la position de mon robot et de celui de l'équipe adverse, j'utilise un système de caméra (lentille 120°) et la bibliothèque OpenCV pour le traitement de l'image. Les caméras détectent des boitiers avec des LEDs de couleurs qui forment un forme (c'est beau ce que j'écris) et qui permet de repérer l'angle via triangulation.
Voilà, je donnerai des infos au fur et à mesure de mon avancement et j'espère que ça vous plaira
Bonne journée !







 )
)