Nous nous doutons qu’une sortie binaire de la carte Arduino est totalement incapable de commuter un courant de 2A. Il nous faut déterminer un amplificateur de commutation constitué généralement d’un transistor de puissance travaillant en régime Saturé / Bloqué.
Le mode « Saturé / Bloqué ».
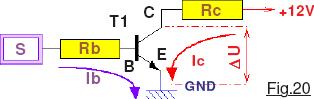 Incontournable lorsque l’on désire réaliser une interface de commutation, le transistor utilisé en mode « Saturé/Bloqué » s’impose naturellement. Considérons sur la Fig.20 le transistor T1 de type NPN. Quand la sortie S du microcontrôleur est à « 0 », le courant Ib est nul et T1 est alors non conducteur. On précise ce fait par le vocable Bloqué. Le courant Ic est nul et sur le collecteur C on retrouve les +12V. Lorsque S passe à l’état « 1 » la broche de l’ATmega328 se trouve à +5V. Le courant de base Ib est alors directement fonction de la résistance de limitation Rb. Le courant collecteur Ic est alors β fois le courant Ib. Par définition, β représente le gain en courant du transistor utilisé. Par exemple, si Ib=2mA et que β=20, Ic sera égal à 2 x 20 = 40mA. Toutefois, le courant collecteur est limité par la résistance de charge Rc. Supposons que Rc = 400Ω. Le plus grand courant qui pourrait la traverser en supposant un court-circuit entre GND et C serait de 12/400=0,03 soit 30mA. Hors le courant de base est plus important que les 1,5mA qui suffiraient à provoquer ce courant. On dit alors que le transistor est Saturé. La chute de potentiel ΔU entre collecteur C et GND est faible et de l’ordre de 0,9V.
Incontournable lorsque l’on désire réaliser une interface de commutation, le transistor utilisé en mode « Saturé/Bloqué » s’impose naturellement. Considérons sur la Fig.20 le transistor T1 de type NPN. Quand la sortie S du microcontrôleur est à « 0 », le courant Ib est nul et T1 est alors non conducteur. On précise ce fait par le vocable Bloqué. Le courant Ic est nul et sur le collecteur C on retrouve les +12V. Lorsque S passe à l’état « 1 » la broche de l’ATmega328 se trouve à +5V. Le courant de base Ib est alors directement fonction de la résistance de limitation Rb. Le courant collecteur Ic est alors β fois le courant Ib. Par définition, β représente le gain en courant du transistor utilisé. Par exemple, si Ib=2mA et que β=20, Ic sera égal à 2 x 20 = 40mA. Toutefois, le courant collecteur est limité par la résistance de charge Rc. Supposons que Rc = 400Ω. Le plus grand courant qui pourrait la traverser en supposant un court-circuit entre GND et C serait de 12/400=0,03 soit 30mA. Hors le courant de base est plus important que les 1,5mA qui suffiraient à provoquer ce courant. On dit alors que le transistor est Saturé. La chute de potentiel ΔU entre collecteur C et GND est faible et de l’ordre de 0,9V.
 La structure Darlington.
La structure Darlington.
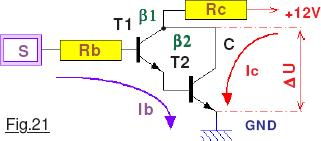
C’est la solution idéale lorsque l’on désire commuter des courants importants avec des signaux de commande dérisoires. Les transistors qui peuvent commuter des courants de plusieurs ampères en mode « Saturé/Bloqué » présentent des gains en courant β généralement très modérés. De l’ordre de 20 à 30, rarement plus. La structure Darlington consiste à chaîner deux transistors de même type comme décrit sur la Fig.21 le gain en courant global étant alors égal à β1 x β2. On arrive alors très facilement à un gain en courant global très important. Du coup, avec quelques mA pour Ib on peut commuter des intensités de plusieurs ampères. L’inconvénient de ce montage, c’est que l’on double la chute de potentiel ΔU entre collecteur C et GND qui alors devient de l’ordre de 1,9V. Seul le transistor T2 doit être de puissance, pour T1 n’importe quel composant pour petit signal conviendra. Si la tension à commuter est négative, il suffit dans ce schéma de remplacer les transistors NPN par des éléments de types PNP.
Le Darlington TIP122.
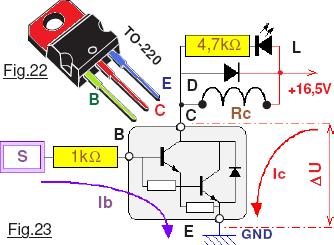 D’un coût très abordable dans le commerce en ligne, le choix c’est porté sur un composant hybride qui intègre deux transistors en mode Darlington et qui peut commuter sans problème jusqu’à 5A avec un gain en courant β de l’ordre de 1000. Le TIP122 peut dissiper jusqu’à 65W très largement au dessus des conditions présentes dans notre montage. Il sera totalement inutile de le munir d’un quelconque dissipateur de chaleur. La Fig.22 sur laquelle on notera que le collecteur est relié électriquement à la plaque métallique du boitier présente son brochage. La fiche descriptive et d’utilisation de ce composant est jointe à ce didacticiel à titre d’information. On constate que l’encapsulation intègre les deux transistors architecturés en Darlington, ajoute deux résistances internes ainsi qu’une diode. Compte tenu du gain en courant de ce composant, un rapide calcul montre que lorsque S fournit +5V, l’ensemble est déjà saturé avec une résistance de 2kΩ. Par mesure d’optimisation, (Voir la Fig.23) sur l’assemblage définitif on adopte des valeurs pour Rb de 1kΩ. Comme le prévoit la notice d’utilisation, la chute de tension ΔU est d’environ 1,9V. Dans ces conditions, la bobine inductrice est parcourue par un courant approximatif de 2,75A. (Voir le développement dans le cadre situé en bas de ce chapitre.) Durant la conduction en mode Saturé le transistor de puissance dissipe 2,75 x 1,9 = 5,2W. Comme il ne conduit le courant qu’un huitième du temps, sa dissipation moyenne sera d’environ 0,6W, une puissance très faible rendant totalement inutile un quelconque dissipateur de chaleur. C’est un avantage incontestable car on gagne ainsi beaucoup de place sur le circuit imprimé d’interfaçage. Les bobines inductrices chauffent notablement. Sans compliquer l’ensemble par une ventilation forcée, une limitation temporelle de l’usage de la machine avec des périodes de repos gérée par logiciel sera impérative. Enfin, est ajoutée une LED notée L pour visualiser l’état de pilotage de chaque inducteur.
D’un coût très abordable dans le commerce en ligne, le choix c’est porté sur un composant hybride qui intègre deux transistors en mode Darlington et qui peut commuter sans problème jusqu’à 5A avec un gain en courant β de l’ordre de 1000. Le TIP122 peut dissiper jusqu’à 65W très largement au dessus des conditions présentes dans notre montage. Il sera totalement inutile de le munir d’un quelconque dissipateur de chaleur. La Fig.22 sur laquelle on notera que le collecteur est relié électriquement à la plaque métallique du boitier présente son brochage. La fiche descriptive et d’utilisation de ce composant est jointe à ce didacticiel à titre d’information. On constate que l’encapsulation intègre les deux transistors architecturés en Darlington, ajoute deux résistances internes ainsi qu’une diode. Compte tenu du gain en courant de ce composant, un rapide calcul montre que lorsque S fournit +5V, l’ensemble est déjà saturé avec une résistance de 2kΩ. Par mesure d’optimisation, (Voir la Fig.23) sur l’assemblage définitif on adopte des valeurs pour Rb de 1kΩ. Comme le prévoit la notice d’utilisation, la chute de tension ΔU est d’environ 1,9V. Dans ces conditions, la bobine inductrice est parcourue par un courant approximatif de 2,75A. (Voir le développement dans le cadre situé en bas de ce chapitre.) Durant la conduction en mode Saturé le transistor de puissance dissipe 2,75 x 1,9 = 5,2W. Comme il ne conduit le courant qu’un huitième du temps, sa dissipation moyenne sera d’environ 0,6W, une puissance très faible rendant totalement inutile un quelconque dissipateur de chaleur. C’est un avantage incontestable car on gagne ainsi beaucoup de place sur le circuit imprimé d’interfaçage. Les bobines inductrices chauffent notablement. Sans compliquer l’ensemble par une ventilation forcée, une limitation temporelle de l’usage de la machine avec des périodes de repos gérée par logiciel sera impérative. Enfin, est ajoutée une LED notée L pour visualiser l’état de pilotage de chaque inducteur.
Réalisation du circuit imprimé de la commutation de puissance.
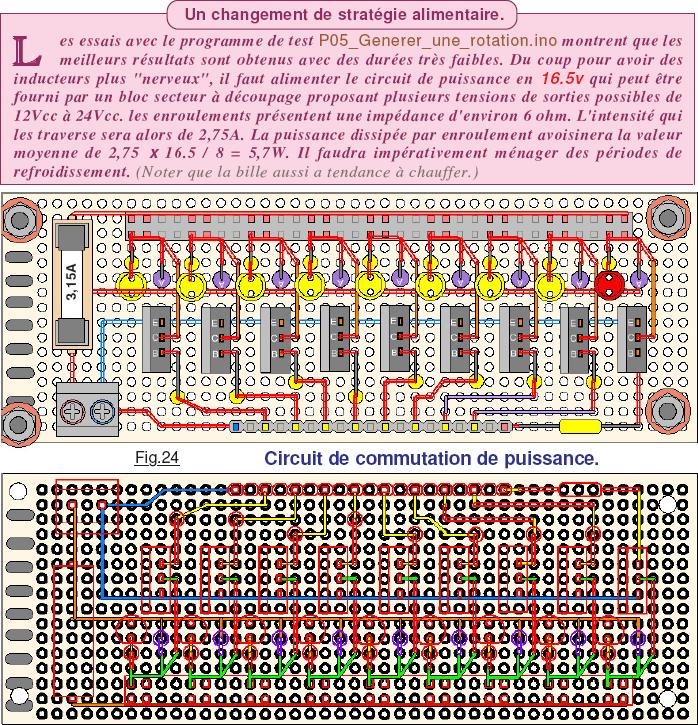
C’est l’Étape n°2 annoncée en haut de la page 5 de ce didacticiel. La plaquette cuivrée prépercée d’expérimentation retaillée aux dimensions idoines, regroupe les neuf circuits de commutation des enroulements inducteurs, c’est à dire les huit sections d’accélération de la « particule » et le bobinage du collisionneur. Pour mémoire, le collisionneur du prototype utilise un petit transistor de faible puissance, car l’enroulement ne consomme que 50mA. Par contre, logiquement vous allez bobiner du fil émaillé de 0,4mm de diamètre et l’enroulement exigera une impulsion de 2,75A. Aussi, contrairement aux photographies du prototype, le dessin du circuit imprimé que je vous propose donné en Fig.24 utilise neuf composants TIP122. La plaquette utilisée ne comporte coté cuivre que des pastilles encerclant les trous alignés au pas classique de 2,54mm. On remarque sur les deux dessins qu’un fusible de 3,15A permet d’isoler le +16,5V des bobines inductrices. Ce n’est pas à franchement parler pour protéger cette ligne contre les surintensités. Le but réel de se fusible consiste à ne pas soumettre à la « puissance » le circuit lors de certaines phases de mise au point du programme d’exploitation. Ainsi, si durant les essais primaires une sortie passait à l’état « 1 » de façon permanente, le bobinage incriminé ne risquerait pas une surchauffe rapide. (Il serait soumis à une puissance constante de 5,7W ce qui serait notable et préjudiciable au matériel.)
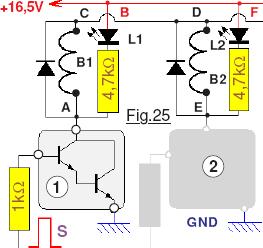 Quand le fusible est retiré et que le +16,5V est présent sur le circuit, on constate que toutes les LEDs de la « rampe lumineuse » s’illuminent alors qu’une seule sortie sur les neuf est à l’état « 1 ». Ce comportement n’est pas anormal bien qu’il soit perturbant. Pour comprendre l’origine de cette curiosité, observons la Fig.25 qui décrit deux commutateurs voisins 1 et 2. Le Darlington 2 n’étant pas piloté son entrée étant à l’état « 0 », est en mode isolé et n’intervient pas électriquement. La sortie S qui pilote 1 passe à l’état « 1 ». Le Darlington passe en état saturé et le point A se retrouve à l’état GND. Du coup, L1 s’illumine par le courant qui traverse la ligne de B vers A. Comme B1 ne fait que 6Ω le potentiel de A se retrouve en C et en D soit GND. Comme B2 ne fait que 6Ω également, le point E à son tour est au potentiel de GND. Par voie de conséquences toutes les autres LEDs telles que L2 vont s’illuminer suite au courant qui circule de F vers E puis chemine de D vers C et vers A. En conclusion, si on retire le fusible de son support et que le +16,5V alimente l’interface, dès que l’une des neuf sorties de commutation passe à l’état « 1 » pour alimenter l’un des inducteurs, les neuf LEDs de visualisation des divers états binaires s’illuminent et il ne faudra pas s’en étonner.
Quand le fusible est retiré et que le +16,5V est présent sur le circuit, on constate que toutes les LEDs de la « rampe lumineuse » s’illuminent alors qu’une seule sortie sur les neuf est à l’état « 1 ». Ce comportement n’est pas anormal bien qu’il soit perturbant. Pour comprendre l’origine de cette curiosité, observons la Fig.25 qui décrit deux commutateurs voisins 1 et 2. Le Darlington 2 n’étant pas piloté son entrée étant à l’état « 0 », est en mode isolé et n’intervient pas électriquement. La sortie S qui pilote 1 passe à l’état « 1 ». Le Darlington passe en état saturé et le point A se retrouve à l’état GND. Du coup, L1 s’illumine par le courant qui traverse la ligne de B vers A. Comme B1 ne fait que 6Ω le potentiel de A se retrouve en C et en D soit GND. Comme B2 ne fait que 6Ω également, le point E à son tour est au potentiel de GND. Par voie de conséquences toutes les autres LEDs telles que L2 vont s’illuminer suite au courant qui circule de F vers E puis chemine de D vers C et vers A. En conclusion, si on retire le fusible de son support et que le +16,5V alimente l’interface, dès que l’une des neuf sorties de commutation passe à l’état « 1 » pour alimenter l’un des inducteurs, les neuf LEDs de visualisation des divers états binaires s’illuminent et il ne faudra pas s’en étonner.
La gestion des alimentations.
Bien que l’entrée VIN de la carte Arduino NANO peut être soumise à des tensions jusqu’à 20Vcc, j’ai préféré insérer un autre régulateur en amont. (J’en avais quatre de disponibles, alors je me suis permis ce luxe.) Fondamentalement il n’est pas indispensable et l’on peut s’en passer. Toutefois, l’usage de ce petit module d’un prix de vente raisonnable présente deux avantages qui sans révolutionner le développement de ce prototype n’en constituent pas moins un bénéfice bien utile :
• Ce régulateur va servir de barrière à toute impulsion parasite qui pourrait survenir de l’environnement électromagnétique avec commutations « brutales » de courants instantanés relativement importants et de plus sur des inductances.
• Le petit module utilisé incorpore un afficheur qui permet de visualiser à convenance la tension injectée en entrée du module, et celle que l’on peut ajuster en sortie.
Pour information je l’ai approvisionné ICI.
Par exemple sur les deux photographies d’Image 27.JPG et d’Image 28.JPG l’ensemble technique est terminé et l’on observe sur « le tableau de maitrise » l’orifice de passage du tout petit tournevis qui sert à ajuster librement la tension de sortie. Une valeur de l’ordre de 8Vcc sera parfaite. Le potentiomètre est de type multi tours et l’on peut facilement ajuster finement la valeur.
Deux sources d’alimentation en énergie à partir du secteur alternatif 220V sont prévues. La première consiste à utiliser un bloc alimentation à découpage du commerce qui peut proposer en sortie une tension de l’ordre de 16,5VCC. Ce type de module assure toutes les sécurités imposées par les contraintes européennes, et présente un rendement excellent. Ce type de produit existe en de multiples variantes et à des tarifs très variables. Choisissez l’un de ces modèles sachant que le mien permet de sélectionner des tensions de sortie entre 12 et 24V avec une intensité possible de 4,5A. La deuxième possibilité envisagée consiste à mettre à contribution une petite alimentation basse tension de laboratoire dont on peut ajuster la tension 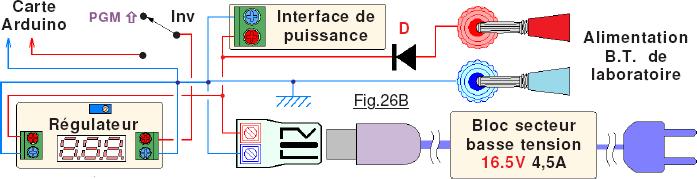 de sortie à convenance. Dans ce but deux prises pour fiches banane de 4mm sont prévues sur la plaque supportant les divers boutons de commande destinés à l’opérateur. On peut observer ces deux douilles implantées sur la machine avec Image 29.JPG et d’Image 30.JPG de la <Galerie d’images>. En particulier sur Image 30.JPG on constate que l’extrémité de la douille noire pour GND est proche du petit boulon de fixation du pied en caoutchouc. Toutefois, il n’est jamais totalement exclu qu’une erreur de branchement conduise à une inversion de polarité. Les Darlingtons dans ce cas passeraient en court-circuit franc. Si le fusible saute, alors l’alimentation de laboratoire peut fort bien débiter une intensité suffisante pour détruire le petit module de la Fig.26A et la carte Arduino par effet de cascade. Aussi, comme montré sur
de sortie à convenance. Dans ce but deux prises pour fiches banane de 4mm sont prévues sur la plaque supportant les divers boutons de commande destinés à l’opérateur. On peut observer ces deux douilles implantées sur la machine avec Image 29.JPG et d’Image 30.JPG de la <Galerie d’images>. En particulier sur Image 30.JPG on constate que l’extrémité de la douille noire pour GND est proche du petit boulon de fixation du pied en caoutchouc. Toutefois, il n’est jamais totalement exclu qu’une erreur de branchement conduise à une inversion de polarité. Les Darlingtons dans ce cas passeraient en court-circuit franc. Si le fusible saute, alors l’alimentation de laboratoire peut fort bien débiter une intensité suffisante pour détruire le petit module de la Fig.26A et la carte Arduino par effet de cascade. Aussi, comme montré sur 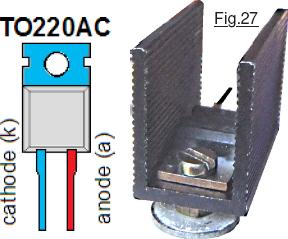 la Fig.26B une diode de protection D a été insérée sur la borne positive. Un composant de type 1N4007 ne conviendra pas, car l’intensité qui traverse cette diode est importante. Aussi, le choix c’est porté sur une BYW29-100 qui peut redresser jusqu’à 8A. Comme je ne savais pas quelle serait l’importance de l’échauffement, cette dernière de boitier TO220AC est immobilisée sur un petit radiateur. Comme le montre la Fig.27 elle est un peu éloignée du statif de la machine et assemblée sur ce dernier sur une rondelle plate large. Les deux photographies d’Image 31.JPG et d’Image 32.JPG présentent deux vues rapprochées de l’implantation de cette diode sur le corps de la machine qui sur ces images est pratiquement assemblée. NOTE tardive : Des essais poussés montrent que la diode D ne chauffe pratiquement pas, le radiateur de la Fig.27 n’est pas du tout indispensable.
la Fig.26B une diode de protection D a été insérée sur la borne positive. Un composant de type 1N4007 ne conviendra pas, car l’intensité qui traverse cette diode est importante. Aussi, le choix c’est porté sur une BYW29-100 qui peut redresser jusqu’à 8A. Comme je ne savais pas quelle serait l’importance de l’échauffement, cette dernière de boitier TO220AC est immobilisée sur un petit radiateur. Comme le montre la Fig.27 elle est un peu éloignée du statif de la machine et assemblée sur ce dernier sur une rondelle plate large. Les deux photographies d’Image 31.JPG et d’Image 32.JPG présentent deux vues rapprochées de l’implantation de cette diode sur le corps de la machine qui sur ces images est pratiquement assemblée. NOTE tardive : Des essais poussés montrent que la diode D ne chauffe pratiquement pas, le radiateur de la Fig.27 n’est pas du tout indispensable.
La suite est ici.


