Cette implantation reprend pour le codeur rotatif et pour l’afficheur OLED la répartition déjà adoptée sur d’autres applications à base d’Arduino NANO, simplifiant ainsi la rédaction du programme d’utilisation, ainsi que l’étude du circuit imprimé supportant la carte du microcontrôleur. Comme on peut le constater sur la Fig.28 on a mobilisé deux entrées analogiques pour les deux boutons poussoir. Il serait facile de gérer ces deux derniers sur une seule entrée. Toutefois, dans cette application il n’y a pas vraiment à optimiser. Du coup les plages de seuils de détection sont plus étendues, augmentant d’autant l’immunité aux éventuels parasites. C’est d’autant plus justifié que l’on commute à « fortes intensités » des bobines magnétiques, phénomène propice à la génération de perturbations électromagnétiques.

L’expérience a montré que l’impédance du bouton central du codeur rotatif étant trop élevée, des faux clics étaient détectés. Cette impédance a été diminuée en interposant une résistance de 1kΩ entre A3 et le +5Vcc. De même que pour éliminer les faux rebonds de commutation sur le codeur rotatif, deux condensateurs de 100nF sont ajoutés entre A, B et GND. On peut naturellement se demander pourquoi les huit inducteurs n’ont pas été tous connectés à des broches voisines. On remarque un élément « perturbateur » en D11. C’est un BUZZER passif qui pour des facilités de programmation utilise de la PWM, D12 et D13 ne pouvant pas générer ce type de signal. C’est la raison pour laquelle le petit bruiteur à été intercalé, ce qui du reste ne complique en rien la programmation. Le câblage des trois LEDs est conçu pour laisser à la conception le choix entre un composant triple à cathode commune, ou à trois témoins lumineux indépendants. C’est au moment de l’élaboration du circuit imprimé que le choix de trois diodes a été effectué.
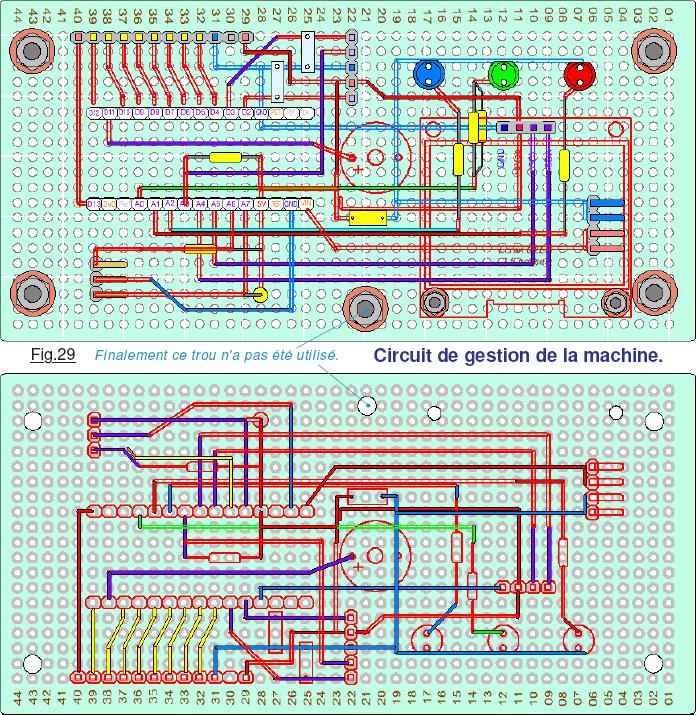
Réalisation du circuit imprimé de la carte Arduino NANO.
C’est l’Étape n°3 annoncée en haut de la page 5 de ce didacticiel. Une plaquette cuivrée prépercée d’expérimentation retaillée aux dimensions requises regroupe les divers composants qui équipent le cœur de gestion de la machine. Il est évident qu’à ce stade du projet tout n’est pas déterminé. Je ne puis être certain par exemple que le Buzzer sera effectivement utilisé. On va donc commencer par réaliser le circuit imprimé et le tester avec P04_Tester_le_CI_NANO.ino prévu à cet effet. L’utilisation de ce petit outil logiciel est précisée en tête de listage du programme.
Avant d’envisager de développer le programme final d’exploitation de cette petite machine ludique, il importe de valider le concept et de tester l’accélération de la bille par usage du logiciel outil P05_Generer_une_rotation.ino prévu dans ce but. Toutefois, avant de passer à la suite « naturelle » de ce didacticiel, il me semble opportun d’ouvrir ici un chapitre « de transition » sur les nombreuses étapes concrètes qui conduisent à l’élaboration matérielle de l’ensemble, de son assemblage et du câblage général des diverses lignes d’alimentation et d’interconnexions entre les modules électronique qui équipent ce prototype. Le logiciel final suivra …
La suite est ici.


