Ă ce stade du dĂŠveloppement, il faut dĂŠfinir la structure du clavier qui servira Ă l’interface HOMME/MACHINE. Plus il sera ÂŤÂ discret , et meilleure sera la mise en Ĺuvre de la machine. Une bonne expĂŠrience sur ce type de rĂŠalisations de faible encombrement m’a convaincu qu’associer au codeur rotatif un clavier Ă cinq touches est gĂŠnĂŠralement suffisant. Sans prĂŠjuger des proportions et des dimensions, la Fig.18 donne une idĂŠe de ce que pourrait ĂŞtre l’appareil
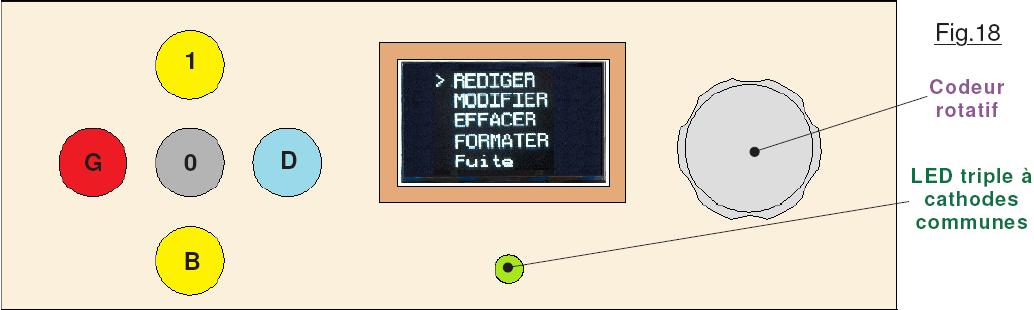
quand il sera terminĂŠ. Ătant droitier, je privilĂŠgie la position du capteur rotatif Ă droite de l’afficheur OLED. Une diode ĂŠlectroluminescente avec trois couleurs fondamentales sera largement suffisante pour informer l’opĂŠrateur de certains ĂŠvĂŠnements particuliers. Quand au clavier, il reste Ă dĂŠfinir ses protocoles d’utilisation. Par exemple G et D peuvent choisir des sens de rotation, B, 0 et 1 imposer une ĂŠcriture. Ou les quatre BP extĂŠrieurs servent Ă se dĂŠplacer dans une grille, et le codeur rotatif Ă changer la valeur de la cellule pointĂŠe. Ces façons d’utiliser le clavier ĂŠlĂŠmentaire seront choisir par expĂŠrimentation pour aboutir Ă des protocoles conviviaux et une machine Ă forte qualitĂŠ opĂŠrationnelle.
 L’agencement matĂŠriel.
L’agencement matĂŠriel.
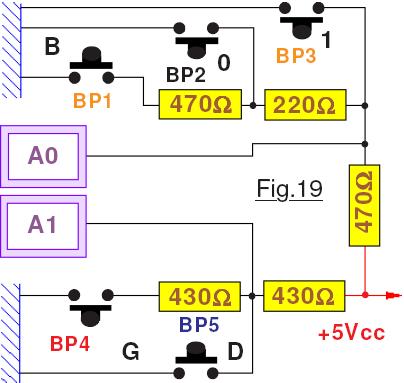
Inutile de redĂŠcouvrir le monde. Le schĂŠma ĂŠlectrique du clavier montrĂŠ en Fig.19 reprend intĂŠgralement un circuit totalement analogue utilisĂŠ sur d’autres projets qui sont du reste en ligne sur ROBOT MAKER. Les cinq boutons poussoir seront de taille Ă dĂŠterminer, le choix des
ĂŠlĂŠments ĂŠtant probablement influencĂŠ par leur disponibilitĂŠ dans les tiroirs. L’approvisionnement sera d’autant plus aisĂŠ que je m’impose des types Ă simple fermeture de contact. Ce sont de loin les plus courants et existent Ă profusion sur les ĂŠtagères virtuelles du commerce en ligne.
Le clavier Ă cinq touches.
Compte tenu du faible nombre de touches, il est plus rentable de monopoliser deux entrĂŠes analogiques que d’effectuer un multiplexage. La Fig.19 prĂŠsente la solution retenue dans laquelle les valeurs des rĂŠsistances sont choisies pour minimiser le courant consommĂŠ, optimiser les zones de dĂŠcision et offrir une immunitĂŠ satisfaisante au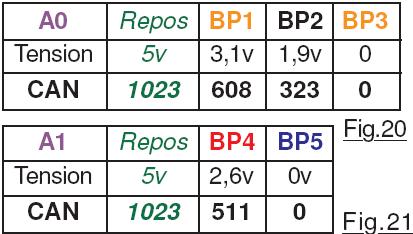 x parasites. Les valeurs des rĂŠsistances sont choisies de façon
x parasites. Les valeurs des rÊsistances sont choisies de façon
Ă avoir des ĂŠcarts de tension ÂŤÂ homogènes  en fonction des boutons poussoir activĂŠs dans la plage dĂŠfinie par la valeur Ă vide tout en adoptant des rĂŠfĂŠrences de composants très courantes faciles Ă approvisionner. Le tableau de la Fig.20 indique les valeurs obtenues sur la ligne Ă trois boutons alors que celui de la Fig.21 est relatif Ă l’entrĂŠe A1. .
ATTENTION : Les valeurs indiquĂŠes ne sont vraies que si la tension fait environ 4,9V, valeur de la sortie 5V la carte ĂŠtant alimentĂŠe par une ligne USB. La Fig.22 et la Fig.23 prĂŠsentent l’ĂŠtalement obtenu en fonction de la numĂŠrisation effectuĂŠe par les 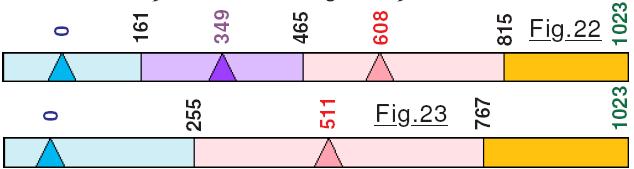 convertisseur de l’ATmega328. On y trouve les seuils de comparaison pour dĂŠterminer quel est le bouton poussoir utilisĂŠ. Pour optimiser le filtrage des parasites, les seuils de comparaison pour dĂŠterminer le bouton poussoir actionnĂŠ sont placĂŠs Ă exactement la moyenne entre les valeurs typiques issues des CAN. (CAN : Conversion Analogique NumĂŠrique.)
convertisseur de l’ATmega328. On y trouve les seuils de comparaison pour dĂŠterminer quel est le bouton poussoir utilisĂŠ. Pour optimiser le filtrage des parasites, les seuils de comparaison pour dĂŠterminer le bouton poussoir actionnĂŠ sont placĂŠs Ă exactement la moyenne entre les valeurs typiques issues des CAN. (CAN : Conversion Analogique NumĂŠrique.)
La diode ĂŠlectroluminescente.
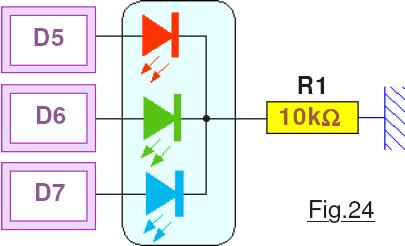 Composant ultra courant, la LED triple Ă cathode commune est ultra courante et très populaire. Il existe diverses rĂŠfĂŠrences dont les rendements peuvent varier. Celle approvisionnĂŠe donne de très bons rĂŠsultats avec une rĂŠsistance de limitation commune de 10kΊ. Non seulement elles prĂŠsentent une très bonne luminositĂŠ avec un courant très faible, et surtout, la clartĂŠ est analogue sur les trois couleurs fondamentales. On peut alors n’introduire qu’une seule rĂŠsistance de limitation de courant R1 entre cathodes et GND. Cet agencement ne convient que si une seule couleur est utilisĂŠe Ă la fois. Dans le cas contraire, c’est la couleur qui engendre la chute de tension aux bornes la plus faible qui s’allumera Ă l’exclusion des autres. Si on dĂŠsire allumer deux ou trois
Composant ultra courant, la LED triple Ă cathode commune est ultra courante et très populaire. Il existe diverses rĂŠfĂŠrences dont les rendements peuvent varier. Celle approvisionnĂŠe donne de très bons rĂŠsultats avec une rĂŠsistance de limitation commune de 10kΊ. Non seulement elles prĂŠsentent une très bonne luminositĂŠ avec un courant très faible, et surtout, la clartĂŠ est analogue sur les trois couleurs fondamentales. On peut alors n’introduire qu’une seule rĂŠsistance de limitation de courant R1 entre cathodes et GND. Cet agencement ne convient que si une seule couleur est utilisĂŠe Ă la fois. Dans le cas contraire, c’est la couleur qui engendre la chute de tension aux bornes la plus faible qui s’allumera Ă l’exclusion des autres. Si on dĂŠsire allumer deux ou trois 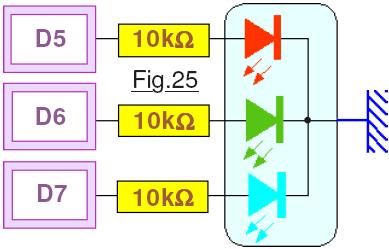 LEDs simultanĂŠment, il faut les piloter conformĂŠment Ă la Fig.25 chaque ligne ĂŠtant indĂŠpendante. Par exemple rouge et bleu donne du violet, bleu et vert produit du cyan, rouge et vert ressemble Ă du jaune. Les trois simultanĂŠment produisent une sorte de blanc moirĂŠ. On peut aussi produire des effets particuliers. par exemple on allume bleu et on fait clignoter rouge etc. Comme pour notre application nous n’avons pas encore dĂŠterminĂŠ quel sera l’usage final, lors du dĂŠveloppement effectuĂŠ par des branchements provisoires sur des plaques Ă essais on adopte le schĂŠma de la Fig.25 quitte Ă simplifier comme sur la Fig.24 si les LEDs ne sont utilisĂŠes qu’indĂŠpendamment les unes des autres.
LEDs simultanĂŠment, il faut les piloter conformĂŠment Ă la Fig.25 chaque ligne ĂŠtant indĂŠpendante. Par exemple rouge et bleu donne du violet, bleu et vert produit du cyan, rouge et vert ressemble Ă du jaune. Les trois simultanĂŠment produisent une sorte de blanc moirĂŠ. On peut aussi produire des effets particuliers. par exemple on allume bleu et on fait clignoter rouge etc. Comme pour notre application nous n’avons pas encore dĂŠterminĂŠ quel sera l’usage final, lors du dĂŠveloppement effectuĂŠ par des branchements provisoires sur des plaques Ă essais on adopte le schĂŠma de la Fig.25 quitte Ă simplifier comme sur la Fig.24 si les LEDs ne sont utilisĂŠes qu’indĂŠpendamment les unes des autres.
L’agencement logiciel.
L’ĂŠtape qui suit naturellement pour la dĂŠtermination du matĂŠriel consiste Ă mettre en place le code pour gĂŠrer les nouveaux composants rĂŠunis au microcontrĂ´leur. Et aussi prendre en compte les donnĂŠes logĂŠes en EEPROM, en particulier ne plus simuler comme sur la Fig.10 et effectuer une lecture rĂŠelle du haut de la mĂŠmoire non 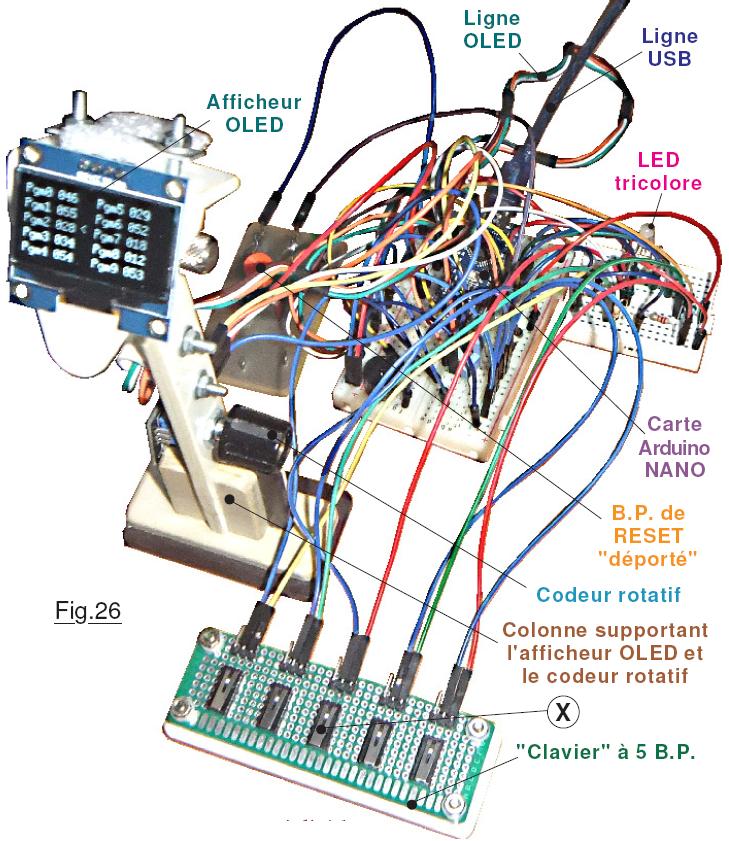 volatile pour en dĂŠduire le contenu. C’est prĂŠcisĂŠment l’objet de P09_Noyau_Complet.ino que l’on tĂŠlĂŠverse sur la carte NANO pour en observer le comportement et surtout vĂŠrifier les routines de servitude. Typique d’un assemblage ĂŠlectrique provisoire, la Fig.26 prĂŠsente ce qui sera probablement la version dĂŠfinitive du matĂŠriel. Les fils ĂŠlectriques qui relient les composants sont tellement nombreux, que la Carte Arduino NANO insĂŠrĂŠe sur une plaque Ă essais est pratiquement invisible masquĂŠe sous le fatras des connections ĂŠlectriques volantes. On comprend que la rĂŠalisation d’un petit circuit imprimĂŠ adaptĂŠ sera plus que salutaire. Du reste, pour pouvoir effectuer sans trop se contorsionner, le mini bouton de RESET de la carte Arduino a ĂŠtĂŠ doublĂŠ par un ĂŠlĂŠment extĂŠrieur bien dĂŠgagĂŠ de ce mĂŠli-mĂŠlo inextricable. Ce tutoriel s’adresse Ă toutes celles et tous ceux qui dĂŠsirent concrĂŠtiser une petite Machine de Turing autonome sans pour autant avoir du temps Ă consacrer au plaisir la programmation. ÂŤÂ Oubliez  dans ce cas ce qui suit, car destinĂŠ aux internautes qui utilisent rĂŠgulièrement l’IDE pour leurs propres projets :
volatile pour en dĂŠduire le contenu. C’est prĂŠcisĂŠment l’objet de P09_Noyau_Complet.ino que l’on tĂŠlĂŠverse sur la carte NANO pour en observer le comportement et surtout vĂŠrifier les routines de servitude. Typique d’un assemblage ĂŠlectrique provisoire, la Fig.26 prĂŠsente ce qui sera probablement la version dĂŠfinitive du matĂŠriel. Les fils ĂŠlectriques qui relient les composants sont tellement nombreux, que la Carte Arduino NANO insĂŠrĂŠe sur une plaque Ă essais est pratiquement invisible masquĂŠe sous le fatras des connections ĂŠlectriques volantes. On comprend que la rĂŠalisation d’un petit circuit imprimĂŠ adaptĂŠ sera plus que salutaire. Du reste, pour pouvoir effectuer sans trop se contorsionner, le mini bouton de RESET de la carte Arduino a ĂŠtĂŠ doublĂŠ par un ĂŠlĂŠment extĂŠrieur bien dĂŠgagĂŠ de ce mĂŠli-mĂŠlo inextricable. Ce tutoriel s’adresse Ă toutes celles et tous ceux qui dĂŠsirent concrĂŠtiser une petite Machine de Turing autonome sans pour autant avoir du temps Ă consacrer au plaisir la programmation. ÂŤÂ Oubliez  dans ce cas ce qui suit, car destinĂŠ aux internautes qui utilisent rĂŠgulièrement l’IDE pour leurs propres projets :
Quand nous engageons rĂŠgulièrement nos loisirs dans le dĂŠveloppement de petites applications Ă microcontrĂ´leurs, on finit souvent par employer frĂŠquemment des pĂŠriphĂŠriques courants. La concrĂŠtisation du projet peut prendre plusieurs semaines. Aussi, il ne faut pas hĂŠsiter Ă s’entourer de petits accessoires qui serviront rĂŠgulièrement et nous assisteront tout au long de nos expĂŠriences de programmeurs. Par exemple la Colonne place bien au dessus du montage l’Afficheur qui est sur un support articulĂŠ pour l’orienter en hauteur directement vers l’opĂŠrateur. En particulier on remarquera que la Ligne OLED qui relie l’Afficheur OLED au microcontrĂ´leur est longue et souple. On peut 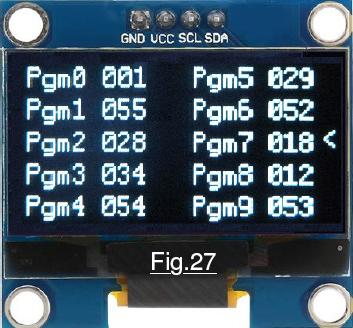 ainsi bien dĂŠgager l’ensemble, voir l’approcher de l’opĂŠrateur. Ainsi, Ă l’aide d’une loupe Ă fort grossissement on peut bien voir certaines zones de l’ĂŠcran. Dans cette application ce ne sera certainement pas le cas. Mais j’utilise ĂŠgalement des afficheurs bien plus petits de 0,96 pouces de diagonale. Pour vĂŠrifier des dessins, des graduations etc, il faut zoomer. Sur cette Colonne est ĂŠgalement immobilisĂŠ le Codeur rotatif sur lequel on clique un nombre incalculable de fois. Il importe que ce type de composant soit vraiment aisĂŠ Ă manipuler. Il en va ĂŠgalement de mĂŞme pour les mini-claviers qui ĂŠquipent nos petites rĂŠalisation. Clipser des petits boutons poussoir sur des plaques Ă essais est une solution très malcommode. Les fils de liaison gĂŞnent l’accès, et quand on clique pas exactement au milieu ils basculent et il faut alors les rĂŠinsĂŠrer correctement sur la plaquette expĂŠrimentale. C’est ainsi que dans le tiroir des outils on trouve un clavier Ă 16 touches pour multiplexer, des inverseurs et boutons en tout genre, des rampes de LEDs et toute une famille de petites ĂŠlectroniques d’accastillage. Bref, au cours de vos ÂŤÂ cheminements  de programmeur, construisez vos outils ..
ainsi bien dĂŠgager l’ensemble, voir l’approcher de l’opĂŠrateur. Ainsi, Ă l’aide d’une loupe Ă fort grossissement on peut bien voir certaines zones de l’ĂŠcran. Dans cette application ce ne sera certainement pas le cas. Mais j’utilise ĂŠgalement des afficheurs bien plus petits de 0,96 pouces de diagonale. Pour vĂŠrifier des dessins, des graduations etc, il faut zoomer. Sur cette Colonne est ĂŠgalement immobilisĂŠ le Codeur rotatif sur lequel on clique un nombre incalculable de fois. Il importe que ce type de composant soit vraiment aisĂŠ Ă manipuler. Il en va ĂŠgalement de mĂŞme pour les mini-claviers qui ĂŠquipent nos petites rĂŠalisation. Clipser des petits boutons poussoir sur des plaques Ă essais est une solution très malcommode. Les fils de liaison gĂŞnent l’accès, et quand on clique pas exactement au milieu ils basculent et il faut alors les rĂŠinsĂŠrer correctement sur la plaquette expĂŠrimentale. C’est ainsi que dans le tiroir des outils on trouve un clavier Ă 16 touches pour multiplexer, des inverseurs et boutons en tout genre, des rampes de LEDs et toute une famille de petites ĂŠlectroniques d’accastillage. Bref, au cours de vos ÂŤÂ cheminements  de programmeur, construisez vos outils ..
Fin des ÂŤÂ confidences , revenons Ă P09_Noyau_Complet.ino qui sur un RESET affiche le MENU de BASE. Ă l’aide du codeur rotatif indexer l’item EEPROM et valider. S’affiche l’ĂŠcran de la Fig.26 sur lequel on a indexĂŠ Pm7 qui contient l’algorithme dont la rĂŠfĂŠrence est le n°18. Il ne s’agit plus d’une simulation, car avec P09 on effectue rĂŠellement l’analyse du contenu de l’EEPROM. (Notez au passage que les dix emplacements sont occupĂŠs pour pouvoir librement effectuer des actions en tous genres dans la mĂŠmoire non volatile et en vĂŠrifier le bon dĂŠroulement. C’est du reste le bon moment pour ouvrir une parenthèse relative aux croquis fournis.)
Cliquer deux fois sur le B.P.C. afin de revenir au MENU de BASE et vous en profitez pour constater que maintenant c’est la composante rouge de la LED qui 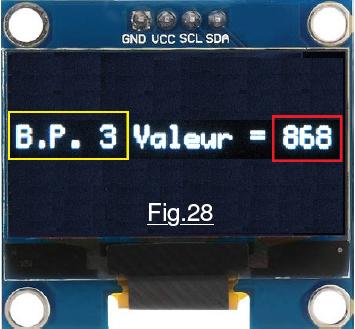 s’allume durant l’enfoncement. Puis cliquer sur l’un des ÂŤÂ Switch  qui ici sert de bouton poussoir. Par exemple sur X de la Fig.27 et immĂŠdiatement, comme le montre la Fig.28 la valeur de la numĂŠrisation est affichĂŠe dans l’encadrĂŠ rouge. C’est cette valeur, ainsi que celles des quatre autres boutons qui seront prises en compte pour optimiser les seuils de dĂŠtection qui sur les figures 22 et 23 sont relatifs Ă des rĂŠsultats issus d’un clavier installĂŠ sur un autre projet. Les rĂŠsistances sont de valeurs prĂŠcises, alors que sur le montage de la Fig.26 c’est du ÂŤÂ n’importe quoi . Le logiciel dĂŠtermine immĂŠdiatement quel est le bouton poussoir actionnĂŠ. Vous avez certainement remarquĂŠ que tant que le switch est activĂŠ, la composante verte de la LED triple qui s’allume. Il y aura donc un contrĂ´le visuel de la prise en compte de ces deux pĂŠriphĂŠriques.
s’allume durant l’enfoncement. Puis cliquer sur l’un des ÂŤÂ Switch  qui ici sert de bouton poussoir. Par exemple sur X de la Fig.27 et immĂŠdiatement, comme le montre la Fig.28 la valeur de la numĂŠrisation est affichĂŠe dans l’encadrĂŠ rouge. C’est cette valeur, ainsi que celles des quatre autres boutons qui seront prises en compte pour optimiser les seuils de dĂŠtection qui sur les figures 22 et 23 sont relatifs Ă des rĂŠsultats issus d’un clavier installĂŠ sur un autre projet. Les rĂŠsistances sont de valeurs prĂŠcises, alors que sur le montage de la Fig.26 c’est du ÂŤÂ n’importe quoi . Le logiciel dĂŠtermine immĂŠdiatement quel est le bouton poussoir actionnĂŠ. Vous avez certainement remarquĂŠ que tant que le switch est activĂŠ, la composante verte de la LED triple qui s’allume. Il y aura donc un contrĂ´le visuel de la prise en compte de ces deux pĂŠriphĂŠriques.
Pour achever cette expĂŠrimentation, on clique sur tous les boutons et surtout on retient :

BILAN : Le compilateur s’active sur P09 et annonce son verdict : Le programme actuel fait 11270 octets et occupe dĂŠjĂ 36% de la place disponible pour le logiciel alors que l’on effectue encore aucun traitement. Pour le moment il ne faut pas s’affoler. En effet, une longue expĂŠrience a montrĂŠ que c’est toujours la mise en place des procĂŠdures de base qui gloutonne un maximum de place. Ensuite l’ĂŠvolution sera moins dramatique. Et puis s’il faut rĂŠduire nos objectifs on taillera dans les prĂŠvisions quitte Ă abandonner les belles reprĂŠsentations graphiques. De toute façon, Ă partir du moment oĂš l’on dĂŠsire utiliser un composant de faible dimensions pouvant afficher un nombre significatif de caractères textuels, qu’il soit graphique ou non n’intervient pas vraiment dans la taille occupĂŠes par les procĂŠdures puisĂŠes dans sa bibliothèque. En revanche, plus on va chercher Ă bĂŠnĂŠficier des possibilitĂŠs de U8glib, plus la boulimie en octets va s’amplifier. Aussi, Ă ce stade du dĂŠveloppement on doit impĂŠrativement effectuer des choix et dĂŠfinir une stratĂŠgie :
StratĂŠgie d’utilisation de la librairie U8glib.
Livret Bibliothèque U8glib en main, on notera en bas de P4 que chaque police de caractère encombrera la RAM dynamique. Il ne faut donc pas s’ĂŠtonner qu’actuellement le programme du petit livret en consomme 13%. Ce n’est pas dramatique. D’un autre cotĂŠ, si l’on change plusieurs fois de police de caractères, ce sera chaque fois du code qui s’ajoute. Aussi, comme l’on affichera que des textes ÂŤÂ ordinaires , on n’utilisera qu’une seule police de caractères pour tout le programme. Par ailleurs, il aurait ĂŠtĂŠ tentant d’exploiter les beaux curseurs de la page P9 du petit livret. Toutefois, il suffit de dĂŠclarer la ÂŤÂ fonte rĂŠduite  et de faire afficher une fois le curseur pour que le programme enfle de 100 octets. On se passera de la possibilitĂŠ d’afficher des curseurs graphiques. Par ailleurs, si possible on minimisera les outils graphiques utilisĂŠs. Le plan budgĂŠtaire ĂŠtant approuvĂŠ, on peut passer au dĂŠveloppement du logiciel. Comme l’exploitation de l’appareil sera impossible sans la facilitĂŠ de crĂŠer et de modifier des Algorithmes, la prochaine ĂŠtape va donc consister Ă mettre en place l’ĂDITEUR de PROGRAMME ainsi que ses fonctions d’affichage. C’est parti …
La suite est ici.