C’est ├Ā double titre que cette ultime version de machines de Turing est autonome. D’une part elle n’a plus besoin d’├¬tre reli├®e ├Ā un ordinateur pour ├®tablir le dialogue Homme/Machine. Par ailleurs, une alimentation ┬½┬Ālocale┬Ā┬╗ ├®vite d’avoir ┬½┬Āle fil ├Ā la patte┬Ā┬╗ au point de vue ├®nerg├®tique. Bien qu’il soit possible d’alimenter ├Ā partir du secteur avec un adaptateur USB via la mini prise, il est ├®galement pr├®vu d’employer une source d’├®nergie propre qui sera ├Ā votre choix une pile 9v GLR61 ou un accumulateur rechargeable de 8,4v de type Ni-MH. Toutefois, cette double possibilit├® n’est pas sans risque pour la carte Arduino si l’utilisateur effectue une mauvaise man┼ōuvre, il faudra faire bien attention.
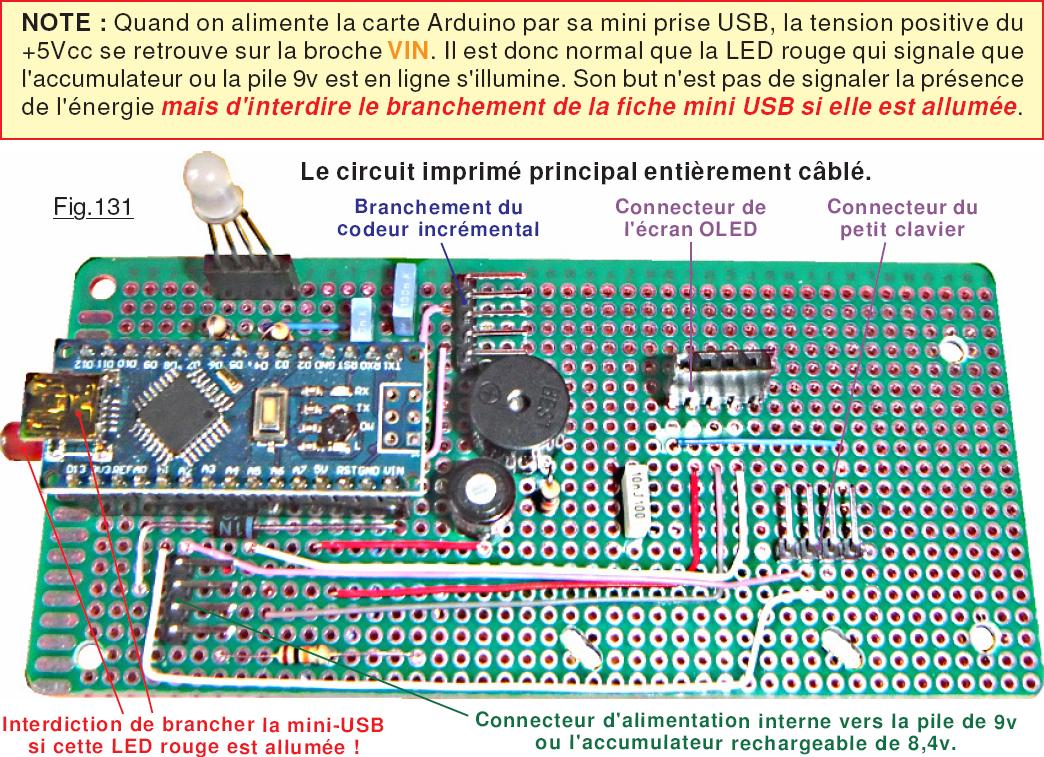
Interdiction de brancher la mini-USB si l’alimentation interne est activ├®e.
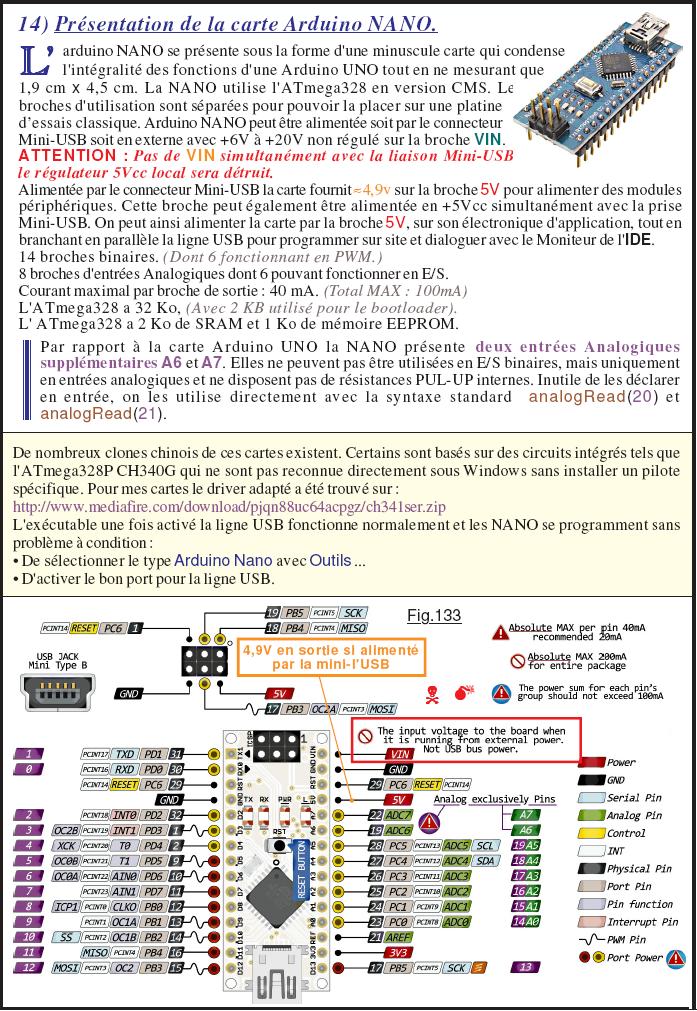
Stipul├® de fa├¦on formelle dans l’encadr├® rouge de la ┬½┬Ānotice┬Ā┬╗ d’utilisation de la carte Arduino NANO donn├®e en Fig.133, il ne faut strictement pas brancher ├Ā la fois une tension sur VIN et du 5Vcc par l’entremise de la mini-prise USB sous peine de d├®truire le r├®gulateur 5v local qui ├Ā parti de la broche VIN alimente la carte en 5v continu et stabilis├®.
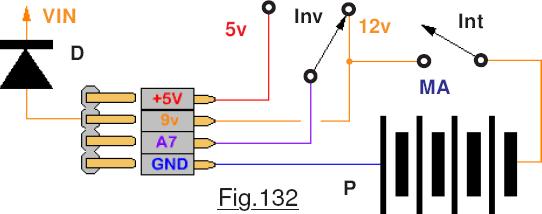 ├Ć partir du moment o├╣ l’appareil ├®lectronique est pourvu d’une alimentation ┬½┬Āembarqu├®e┬Ā┬╗, on se doute qu’il faut pouvoir librement la mettre en service ou la couper. Le sch├®ma ├®lectrique relatif ├Ā la gestion de cette alimentation interne est propos├® en Fig.132 et ne comporte qu’un inverseur Inv est un interrupteur Int. C’est pr├®cis├®ment Int qu’il ne faut pas fermer sur MA lorsque la mini-USB est branch├®e. L’inverseur Inv permet de s├®lectionner pour la mesure de tension en entr├®e A7 le +5Vcc stabilis├®, ou la tension aux bornes de la pile P. (Ou de la batterie rechargeable.) Si par m├®garde l’utilisateur introduit la pile dans le mauvais sens dans son compartiment, la diode D prot├©ge le r├®gulateur contre une inversion de polarit├®.
├Ć partir du moment o├╣ l’appareil ├®lectronique est pourvu d’une alimentation ┬½┬Āembarqu├®e┬Ā┬╗, on se doute qu’il faut pouvoir librement la mettre en service ou la couper. Le sch├®ma ├®lectrique relatif ├Ā la gestion de cette alimentation interne est propos├® en Fig.132 et ne comporte qu’un inverseur Inv est un interrupteur Int. C’est pr├®cis├®ment Int qu’il ne faut pas fermer sur MA lorsque la mini-USB est branch├®e. L’inverseur Inv permet de s├®lectionner pour la mesure de tension en entr├®e A7 le +5Vcc stabilis├®, ou la tension aux bornes de la pile P. (Ou de la batterie rechargeable.) Si par m├®garde l’utilisateur introduit la pile dans le mauvais sens dans son compartiment, la diode D prot├©ge le r├®gulateur contre une inversion de polarit├®.
Chapitre suivant se trouve apr├©s l’encadr├® ci-dessous.
Le circuit imprim├® principal.
├ētudi├® pour supporter la grande majorit├® des composants, il est r├®alis├® ├Ā partir d’un morceau de carte imprim├®es pr├®perc├®e adapt├®e au prototypage. Cet ├®l├®ment mesure 120mm x 55mm. Diverses photographies comment├®es sont rang├®es dans le dossier <Galerie d’images\Machine AUTONOME>. Sur Image 17.JPG on a commenc├® par souder les composants les moins hauts pour finir par les connecteurs et le petit bruiteur. L’Image 18.JPG pr├®sente le circuit termin├®. C’est la hauteur du petit clavier qui conditionne la position de la fa├¦ade sup├®rieure du boitier. Comme le montre Image 22.JPG les deux circuits imprim├®s partagent deux colonnes de fixation sur la 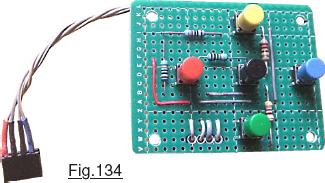 semelle de coffret. Du coup la hauteur du clavier d├®taill├® sur Image 20.JPG impose celle de la LED triple. Pour sur├®lever cette derni├©re, on peut observer sur Image 18.JPG et Image 19.JPG qu’elle est simplement enfich├®e sur un support femelle de type HE14. En particulier sur Image 19.JPG on insiste sur l’interdiction de brancher la fiche mini-USB si la LED rouge est allum├®e, et surtout on pr├®vient qu’au montage il faudra se montrer particuli├©rement attentif quand on va assembler l’afficheur OLED. Ce dernier est soutenu par son connecteur HE14 qui est particulier. Ses broches sont relativement longue ce qui permet de sur├®lever le composant ├Ā la bonne hauteur. Quand on immobilise ce petit ├®cran avec des entretoises et des petits boulons ├ś M2 il importe de faire tr├©s attention ├Ā la plaque de verre de surface particuli├©rement fragile. ├Ć peine vous la brisez et l’afficheur peut servir de porte-clef ! Je vous conseille fortement de brancher le connecteur du petit clavier (Fiche HE34 femelle de la Fig.134) sur le circuit imprim├® principal avant d’installer l’afficheur, ce que montre Image 21.JPG. La photographie d’Image 23.JPG montre bien le connecteur HE14 femelle qui supporte l’afficheur. Manifestement ses broches sont plus longues qu’en standard, et il n’est pas soud├® contre la plaque cuivr├®e. Rassurez-vous, on constate facilement sur Image 24.JPG qu’il n’y a pas beaucoup de liaisons ├Ā r├®aliser sous les deux circuits imprim├®s. Sur Image 25.JPG l’ensemble est vu du cot├® de la LED triple. Enfin Image 26.JPG et Image 27.JPG montrent les deux circuits assembl├®s pour effectuer leur validation. Dans ce but le codeur incr├®mental a ├®t├® branch├® provisoirement pour effectuer les essais. C’est ├Ā ce stade que l’on doit faire appel ├Ā l’outil logiciel <OUTILS du programmeur\Calibrage_des_CAN.ino> pour mesurer les tensions pr├®sentes lors de l’activation des touches et optimiser les seuils de comparaison dans le programme d’exploitation. Noter que les valeurs indiqu├®es sur Fig.21 ├Ā Fig.23 du didacticiel sont issues de ce test final. Toutefois, avant d’enficher la carte Arduino NANO sur ses deux rampes HE14 et de l’alimenter il me semble incontournable d’effectuer une v├®rification m├®thodique et compl├©te du circuit imprim├® de base.
semelle de coffret. Du coup la hauteur du clavier d├®taill├® sur Image 20.JPG impose celle de la LED triple. Pour sur├®lever cette derni├©re, on peut observer sur Image 18.JPG et Image 19.JPG qu’elle est simplement enfich├®e sur un support femelle de type HE14. En particulier sur Image 19.JPG on insiste sur l’interdiction de brancher la fiche mini-USB si la LED rouge est allum├®e, et surtout on pr├®vient qu’au montage il faudra se montrer particuli├©rement attentif quand on va assembler l’afficheur OLED. Ce dernier est soutenu par son connecteur HE14 qui est particulier. Ses broches sont relativement longue ce qui permet de sur├®lever le composant ├Ā la bonne hauteur. Quand on immobilise ce petit ├®cran avec des entretoises et des petits boulons ├ś M2 il importe de faire tr├©s attention ├Ā la plaque de verre de surface particuli├©rement fragile. ├Ć peine vous la brisez et l’afficheur peut servir de porte-clef ! Je vous conseille fortement de brancher le connecteur du petit clavier (Fiche HE34 femelle de la Fig.134) sur le circuit imprim├® principal avant d’installer l’afficheur, ce que montre Image 21.JPG. La photographie d’Image 23.JPG montre bien le connecteur HE14 femelle qui supporte l’afficheur. Manifestement ses broches sont plus longues qu’en standard, et il n’est pas soud├® contre la plaque cuivr├®e. Rassurez-vous, on constate facilement sur Image 24.JPG qu’il n’y a pas beaucoup de liaisons ├Ā r├®aliser sous les deux circuits imprim├®s. Sur Image 25.JPG l’ensemble est vu du cot├® de la LED triple. Enfin Image 26.JPG et Image 27.JPG montrent les deux circuits assembl├®s pour effectuer leur validation. Dans ce but le codeur incr├®mental a ├®t├® branch├® provisoirement pour effectuer les essais. C’est ├Ā ce stade que l’on doit faire appel ├Ā l’outil logiciel <OUTILS du programmeur\Calibrage_des_CAN.ino> pour mesurer les tensions pr├®sentes lors de l’activation des touches et optimiser les seuils de comparaison dans le programme d’exploitation. Noter que les valeurs indiqu├®es sur Fig.21 ├Ā Fig.23 du didacticiel sont issues de ce test final. Toutefois, avant d’enficher la carte Arduino NANO sur ses deux rampes HE14 et de l’alimenter il me semble incontournable d’effectuer une v├®rification m├®thodique et compl├©te du circuit imprim├® de base.
V├®rification compl├©te du circuit imprim├® principal.
Premi├©re v├®rification imp├®rative, se munir d’une loupe ├Ā fort grossissement, nomm├®e ┬½┬Ācompte fils┬Ā┬╗ et v├®rifier visuellement chaque soudure et s’assurer qu’elle ne d├®borde pas accidentellement sur un ├®l├®ment voisin. (Pastille, fil de liaison, broche d’un HE14 …) On doit ensuite examiner les nombreuses liaisons et leurs isolements avec un multim├©tre, mais franchement un TESTEUR DE CONTINUIT├ē sera bien plus convivial car on n’a pas ├Ā regarder un cadran. La validation commence toujours sans la pr├®sence de la carte Arduino NANO.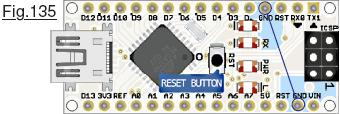
1) V├®rifier l’extr├®mit├® de chaque ligne conductrice en pointant la broche du connecteur concern├® et la lyre associ├®e sur le support de la carte Arduino NANO. Par exemple le +5Vcc sur le connecteur fournissant l’alimentation r├®gul├®e, et la broche not├®e 5V. On peut aussi tester entre GND sur le connecteur fournissant l’alimentation r├®gul├®e, et la broche GND d’Arduino. ATTENTION, il y a deux broches GND, une seule va au connecteur d’alimentation. L’autre est pont├®e par le circuit imprim├®. (Voir la Fig.135)
2) Quand l’int├®gralit├® des liaisons a ├®t├® v├®rifi├®e ainsi que tous les isolements de voisinage, brancher du +5V et GND sur le connecteur HE14 ├Ā quatre broches d├®di├® ├Ā l’alimentation en interne par pile ou par accumulateur. La consommation doit ├¬tre pratiquement nulle.
3) Ponter le +5Vcc sur la broche correspondant ├Ā VIN, la LED rouge doit s’allumer.
4) Tester ensuite avec le +5Vcc sur les lyres correspondant ├Ā D5, D6 et D7. Les composantes rouge, verte et bleue de la LED triple doivent s’illuminer.
5) Ponter ensuite le +5Vcc sur la lyre du microcontr├┤leur qui correspond ├Ā la sortie binaire D4. Le Buzzer doit s’activer et g├®n├®rer un BIP franc. Si la tonalit├® n’est pas nette, c’est certainement que la r├®sistance ins├®r├®e fait plus de 100╬®.
6) Couper l’alimentation. Brancher le petit clavier et immobiliser toutes les entretoises sur les deux plaquettes cuivr├®es comme montr├® sur Image 22.JPG pour aboutir ├Ā un groupe compact et stable.
7) R├®tablir le +5vcc et tester les tensions issues du clavier sur les broches relatives ├Ā A0 et ├Ā A1.
8) Couper l’alimentation et introduire l’afficheur OLED sur son support. Mettre en place ses deux entretoises en prenant les pr├®cautions indispensables pour ne pas l’excorier. Noter au passage sur Image 21.JPG que les deux trous de passage des vis sont en diagonale et allong├®s pour faciliter la co├»ncidence entre les entretoises et les deux trous de fixation de l’afficheur.
9) Quand on a effectu├® une v├®rification compl├©te du circuit imprim├® et que l’on est certain que tout est conforme au sch├®ma, mettre en place la carte Arduino NANO suppos├®e op├®rationnelle, c’est ├Ā dire avec les donn├®es en EEPROM et le programme d’exploitation P17 t├®l├®vers├®. Brancher la mini-fiche ├Ā un petit adaptateur USB secteur. Une ou deux secondes apr├©s la mise sous tension, l’afficheur OLED doit imm├®diatement pr├®senter le portrait d’Alan Turing. Si ce n’est pas le cas couper imm├®diatement l’alimentation et cherchez l’erreur de c├óblage.
10) C’est ├Ā ce stade que l’on t├®l├®verse l’outil logiciel Calibrage_des_CAN.ino pour mesurer les valeurs typiques produites par clavier r├®alis├® avec vos propres composants. Puis vous optimisez les constantes de comparaison dans P17 qui est enfin t├®l├®vers├® et r├®put├® ┬½┬Ād├®finitif┬Ā┬╗.

La suite est ici.