 C’est dans le dossier <CûÂblage final> de la <Galerie d’images> que sont prûˋservûˋes les photographies qui illustrent ce chapitre. Avant de procûˋder au cûÂblage, on commence par rûˋaliser la petite vitre d’Image 55.JPG qui est taillûˋe dans le couvercle d’un boitier qui contenait un Compact Disc. Avec l’avû´nement des clefs USB, CD et DVD qui servaient de mûˋmoire de masse sont dûˋfinitivement mis au rebut. Avant de les ûˋliminer û la dûˋcharge, je rûˋcupû´re les couvercles translucides de leurs boitiers qui sont parfaits pour faire des petites vitres faciles û usiner et û percer. La Fig.147 confirme que la transparence de ce matûˋriau est parfaite. On imprime une petite ûˋtiquette avec l’ordinateur et l’esthûˋtique est garantie. Quand cet ûˋlûˋment est disponible et l’ûˋtiquette imprimûˋe, on les assemble sur la face du dessus du boitier. Ils sont immobilisûˋs par deux petits boulons û M2 et par les deux inverseurs.
C’est dans le dossier <CûÂblage final> de la <Galerie d’images> que sont prûˋservûˋes les photographies qui illustrent ce chapitre. Avant de procûˋder au cûÂblage, on commence par rûˋaliser la petite vitre d’Image 55.JPG qui est taillûˋe dans le couvercle d’un boitier qui contenait un Compact Disc. Avec l’avû´nement des clefs USB, CD et DVD qui servaient de mûˋmoire de masse sont dûˋfinitivement mis au rebut. Avant de les ûˋliminer û la dûˋcharge, je rûˋcupû´re les couvercles translucides de leurs boitiers qui sont parfaits pour faire des petites vitres faciles û usiner et û percer. La Fig.147 confirme que la transparence de ce matûˋriau est parfaite. On imprime une petite ûˋtiquette avec l’ordinateur et l’esthûˋtique est garantie. Quand cet ûˋlûˋment est disponible et l’ûˋtiquette imprimûˋe, on les assemble sur la face du dessus du boitier. Ils sont immobilisûˋs par deux petits boulons û M2 et par les deux inverseurs.
ATTENTION : Le moindre que vous allez serrer un peu trop fort ces divers ûˋlûˋments, et c’est la fissure assurûˋe sur la belle plaque transparente. Aussi il est impûˋratif de serrer trû´s modûˋrûˋment ces divers ûˋlûˋments. Du coup ils risquent sur le long terme de se dûˋsolidariser. C’est la raison pour laquelle sur Image 56.JPG on observe qu’ils sont collûˋs avec du vernis û ongles. Mûˆme punition sur Image 57.JPG pour les deux douilles pour fiches bananes.
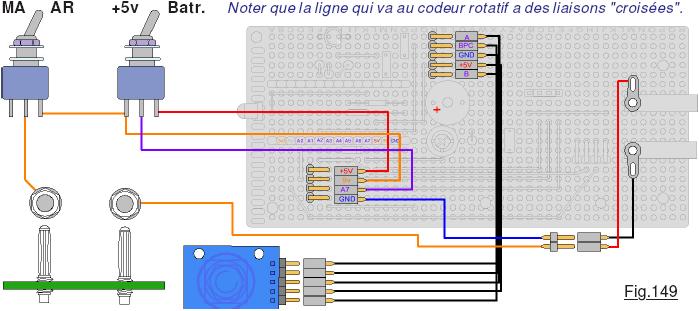
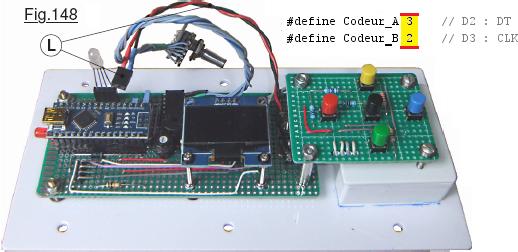 Durant le soudage des inverseurs, vous pouvez ûˆtre certains que des petites goutes de rûˋsine vont sauter et tomber sur la vitre qui serait alors vulnûˋrable lors de son nettoyage. Elle est parfaitement propre car bien nettoyûˋe û l’alcool domestique avant de se voir immobilisûˋe. Aussi, il est facile de la protûˋger avant soudure par le morceau de papier de l’Image 58.JPG immobilisûˋ provisoirement par du ruban adhûˋsif. Il est absolument impûˋratif de pouvoir comme sur la Fig.148 dûˋsolidariser totalement la semelle est ses circuits imprimûˋs du coffret pour des raisons ûˋvidentes de maintenance. Outre le connecteur HE14 qui relie le codeur rotatif au circuit imprimûˋ principal, on observera en L la ligne qui relie les deux bornes de la pile vers les inverseurs. La Fig.149 prûˋcise le schûˋma de cûÂblage ainsi que les connecteurs utilisûˋs. Les fils de cûÂblage gris sont issus de nappes plates de connectiques d’ordinateurs. En sûˋparant les fils et en les torsadant on obtient des lignes ô¨ô compactesô ô£ et souples. Compte tenu des faibles courants consommûˋs par la petite unitûˋ, ces fils sont trû´s largement dimensionnûˋs. Les soudures sur les picots des HE14 sont protûˋgûˋes ûˋlectriquement et mûˋcaniquement par des morceaux de gaine thermorûˋtractable. Ces derniers sont colorûˋs et permettent ainsi de repûˋrer aisûˋment l’orientation des connecteurs. Sur Image 59.JPG le cûÂblage est terminûˋ et l’on procû´de aux ultimes vûˋrifications de bon fonctionnement. Quand on rûˋalise la ligne qui va du clavier vers le HE14 qui se branche sur le codeur rotatif, bien faire attention au fait que les fils ne vont pas broche û broche mais sont croisûˋs. Si par erreur vous avez interverti A et B, il sera facile de modifier le programme Arduino en permutant 3 et 2 dans les dûˋfinitions en tûˆte du programme P16. Enfin, sur la photographie d’Image 60.JPG le coffret est entiû´rement achevûˋ et notre petite machine pleinement fonctionnelle.
Durant le soudage des inverseurs, vous pouvez ûˆtre certains que des petites goutes de rûˋsine vont sauter et tomber sur la vitre qui serait alors vulnûˋrable lors de son nettoyage. Elle est parfaitement propre car bien nettoyûˋe û l’alcool domestique avant de se voir immobilisûˋe. Aussi, il est facile de la protûˋger avant soudure par le morceau de papier de l’Image 58.JPG immobilisûˋ provisoirement par du ruban adhûˋsif. Il est absolument impûˋratif de pouvoir comme sur la Fig.148 dûˋsolidariser totalement la semelle est ses circuits imprimûˋs du coffret pour des raisons ûˋvidentes de maintenance. Outre le connecteur HE14 qui relie le codeur rotatif au circuit imprimûˋ principal, on observera en L la ligne qui relie les deux bornes de la pile vers les inverseurs. La Fig.149 prûˋcise le schûˋma de cûÂblage ainsi que les connecteurs utilisûˋs. Les fils de cûÂblage gris sont issus de nappes plates de connectiques d’ordinateurs. En sûˋparant les fils et en les torsadant on obtient des lignes ô¨ô compactesô ô£ et souples. Compte tenu des faibles courants consommûˋs par la petite unitûˋ, ces fils sont trû´s largement dimensionnûˋs. Les soudures sur les picots des HE14 sont protûˋgûˋes ûˋlectriquement et mûˋcaniquement par des morceaux de gaine thermorûˋtractable. Ces derniers sont colorûˋs et permettent ainsi de repûˋrer aisûˋment l’orientation des connecteurs. Sur Image 59.JPG le cûÂblage est terminûˋ et l’on procû´de aux ultimes vûˋrifications de bon fonctionnement. Quand on rûˋalise la ligne qui va du clavier vers le HE14 qui se branche sur le codeur rotatif, bien faire attention au fait que les fils ne vont pas broche û broche mais sont croisûˋs. Si par erreur vous avez interverti A et B, il sera facile de modifier le programme Arduino en permutant 3 et 2 dans les dûˋfinitions en tûˆte du programme P16. Enfin, sur la photographie d’Image 60.JPG le coffret est entiû´rement achevûˋ et notre petite machine pleinement fonctionnelle.
Les derniers petits dûˋtails de rûˋalisation.
Cette fois c’est dans le dossier <DIVERS> que sont illustrûˋ les propos de ce chapitre. CommenûÏons par la rûˋalisation du sectionneur qui masque la prise mini-USB et autorise l’utilisation de la batterie. Cet ûˋlûˋment est rûˋalisûˋ au moyen d’une petite plaque de circuit imprimûˋ simple face 3 dans laquelle on a percûˋ avec l’entraxe prûˋcis 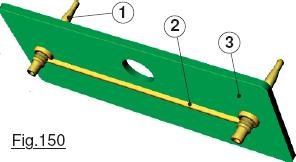 les deux trous de passage des fiches bananes 1. Le diamû´tre de ces trous doit ûˆtre le plus petit possible compatible avec le passage du corps filetûˋ de 1. Quand on place le total sur les deux douilles banane û2mm les deux broches doivent ûˆtre parfaitement alignûˋes. On commence par les souder en un point cotûˋ cuivre, c’est û dire cotûˋ cachûˋ sur la Fig.150 issue des ûˋtudes sur l’ordinateur. Les deux fiches ûˋtant immobilisûˋes, on les insû´re dans les douilles du coffret pour en parfaite l’orientation. Puis on les soude entiû´rement comme sur Image 61.JPG sur laquelle on voit ûˋgalement le petit capot qui englobera la partie extûˋrieure de cet accessoire. Ce petit boitier est moulûˋ en PLA sur une imprimante 3D. Vous trouverez dans le dossier dûˋdiûˋ les deux fichiers nommûˋs Capot sectionneur pour ûˋventuellement en faire un clone. Puis comme on le voit sur Image 62.JPG on prûˋpare le fil de liaison 2 que l’on soude sur les deux fiches bananes visible en Image 63.JPG. Rien û voir avec une quelconque augmentation de la section cuivrûˋe de passage du courant, l’unitûˋ ûˋlectronique consommant moins de 30mA. Cette ô¨ô grosse barreô ô£ cuivrûˋe sert û procurer aux deux fiches une grande rigiditûˋ mûˋcanique. Ensuite, sur Image 64.JPG on colle une petite bague qui crûˋe une zone dans laquelle la colle Araldite ne passera pas. On place une bonne couche de cette colle bi-composants dans le petit moule translucide et on y place le circuit imprimûˋ de telle sorte qu’il affleure en Image 65.JPG le rebord pûˋriphûˋrique. Colle bien durcie on vernit le cuivre pour ne pas qu’il perde sa belle couleur par oxydation et sur Image 66.JPG le ô¨ô bouchon sectionneurô ô£ est terminûˋ. La bague noire sert û crûˋer un canal de passage de la lumiû´re ûˋmise par la LED rouge que l’on peut ainsi
les deux trous de passage des fiches bananes 1. Le diamû´tre de ces trous doit ûˆtre le plus petit possible compatible avec le passage du corps filetûˋ de 1. Quand on place le total sur les deux douilles banane û2mm les deux broches doivent ûˆtre parfaitement alignûˋes. On commence par les souder en un point cotûˋ cuivre, c’est û dire cotûˋ cachûˋ sur la Fig.150 issue des ûˋtudes sur l’ordinateur. Les deux fiches ûˋtant immobilisûˋes, on les insû´re dans les douilles du coffret pour en parfaite l’orientation. Puis on les soude entiû´rement comme sur Image 61.JPG sur laquelle on voit ûˋgalement le petit capot qui englobera la partie extûˋrieure de cet accessoire. Ce petit boitier est moulûˋ en PLA sur une imprimante 3D. Vous trouverez dans le dossier dûˋdiûˋ les deux fichiers nommûˋs Capot sectionneur pour ûˋventuellement en faire un clone. Puis comme on le voit sur Image 62.JPG on prûˋpare le fil de liaison 2 que l’on soude sur les deux fiches bananes visible en Image 63.JPG. Rien û voir avec une quelconque augmentation de la section cuivrûˋe de passage du courant, l’unitûˋ ûˋlectronique consommant moins de 30mA. Cette ô¨ô grosse barreô ô£ cuivrûˋe sert û procurer aux deux fiches une grande rigiditûˋ mûˋcanique. Ensuite, sur Image 64.JPG on colle une petite bague qui crûˋe une zone dans laquelle la colle Araldite ne passera pas. On place une bonne couche de cette colle bi-composants dans le petit moule translucide et on y place le circuit imprimûˋ de telle sorte qu’il affleure en Image 65.JPG le rebord pûˋriphûˋrique. Colle bien durcie on vernit le cuivre pour ne pas qu’il perde sa belle couleur par oxydation et sur Image 66.JPG le ô¨ô bouchon sectionneurô ô£ est terminûˋ. La bague noire sert û crûˋer un canal de passage de la lumiû´re ûˋmise par la LED rouge que l’on peut ainsi  observer par transparence.
observer par transparence.
Cotûˋ logement de la pile d’alimentation la plaquette d’obturation a ûˋtûˋ conûÏue pour tourner autour de la vis situûˋe û droite sur Image 67.JPG avec visible les gravures de polaritûˋ. Si vous inversez le sens, une diode protû´ge la carte Arduino NANO. Sur Image 68.JPG le logement est entiû´rement dûˋgagûˋ. On replace la pile 9v qui va contre les deux lamelles souples de la Fig.137 sachant que la longueur du logement est volontairement un peu trop importante. Ainsi, comme montrûˋ sur la Fig.151 on doit intercaler une cale dont l’ûˋpaisseur sera choisie pour obtenir un contact franc sans pour autant faire flûˋchir exagûˋrûˋment les deux lamelles de contact. Ici s’achû´ve la description de l’unitûˋ autonome. Je vous souhaite de trouver dans ces pages la motivation de vous crûˋer une telle petite Machine de Turing qui nous rûˋservera d’agrûˋables soirûˋes d’hiver bien au chaud û lui soumettre vos algorithmes …
La suite est ici.