

Présentation du projet 914 PC bot résurrection
Posté par elyo33,
03 mars 2018
·
2â¯081 visite(s)
9114 pc-bot kinect ros
Bonjour tout le monde, voici un premier billet pour poser un peu la situation de ce projet intitulé : 914 PC bot résurrection 
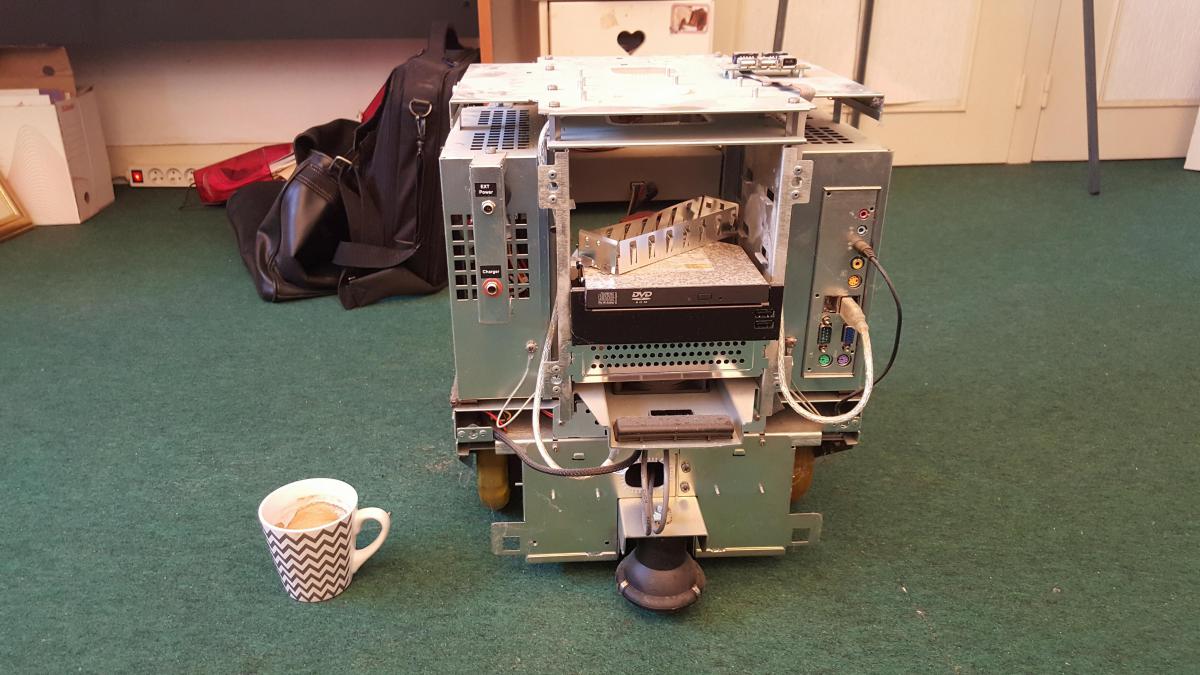
je vais bientôt être l'heureux possesseur d'un 914 pc-bot de chez whitbox robotic.
pour faire simple c'est un robot-pc mini itx (100w max) relié en usb à une carte contrôleur M3 qui gère 2 stepper motor, 8 entrées analogiques, 8 capteur IR, 8 sorties numériques, 8 entrées numériques et 2 port USB "sourced from Mini-ITX".Au niveau de l'alim, c'est un assemblage de 2 M2-ATX pour recharger 2 batteries au plomb de 12v/9ah, avec contrôle de la batterie et extinction automatique.
video :
https://www.youtube.com/watch?v=aGQ920XwEVQ
https://www.youtube.com/watch?v=hoz8GwvhfbA
il sera fonctionnel mais sans les plastiques (ça sent l'impression 3d et ça va me plaire...).
donc en version nue.
la première étape sera de sourcer les éléments (carte mère, alimentation, capteurs, led, M3, moteurs), autant que possible car le serveur de la communauté est down, et en cache il manque l'éssentiel
Depuis 2006, la robotique à plutôt pas mal avancé et la technologie aussi. Je voudrais donc le rendre plus léger, performant... et compatible !
en fouinant dans mes cartons j'ai trouvé une arduino méga, une nano, une pi2 et une kinect... ça fait une jolie colonne vertébrale pour tester du SLAM et remplacer le M3 si besoin
il y a quelques tuto la dessus, il va falloir que je m'y penche sérieusement...
je me demande si il n'est pas envisageable de faire gérer l'anti-collision à l'arduino avec l'algo neuronal présenté en ces lieux...
tandis que ROS sur le pi gérerait la création d'une map et les déplacement sur la MAP via le kinect, il y a un tuto (je cherche la ref que j'ai perdue) pour "lidarisé" les image de la kinect donc.. why not..et si le pi est trop faible, il faudra que je cherche une solution plus puissante.
Après avoir installer les 'bousins' ( virtual box !!) :
ubuntu xenial,
ros, freenect, impossible de trouver un tuto fonctionnels pour les base de ROS,
j'ai testé :
http://wiki.ros.org/ROS/Tutorials
mais mon anglais est limité pour la compréhension
https://fr.macerobot...er-votre-robot/
mais j'ai un bug lors du "catkin_make" avant l'urdf, visiblement il y a un dossier avec src/src..
autant dire que c'est mal baré...je bloque ..genre à la troisième commande ..c'est ..ennuyeux et me pousse à chercher des solution que j'aime moins du genre Microsoft robotic :/
..c'est ..ennuyeux et me pousse à chercher des solution que j'aime moins du genre Microsoft robotic :/
Mais ça ne me plait pas des masses
je vais bientôt être l'heureux possesseur d'un 914 pc-bot de chez whitbox robotic.
pour faire simple c'est un robot-pc mini itx (100w max) relié en usb à une carte contrôleur M3 qui gère 2 stepper motor, 8 entrées analogiques, 8 capteur IR, 8 sorties numériques, 8 entrées numériques et 2 port USB "sourced from Mini-ITX".Au niveau de l'alim, c'est un assemblage de 2 M2-ATX pour recharger 2 batteries au plomb de 12v/9ah, avec contrôle de la batterie et extinction automatique.
video :
https://www.youtube.com/watch?v=aGQ920XwEVQ
https://www.youtube.com/watch?v=hoz8GwvhfbA
il sera fonctionnel mais sans les plastiques (ça sent l'impression 3d et ça va me plaire...).
donc en version nue.
la première étape sera de sourcer les éléments (carte mère, alimentation, capteurs, led, M3, moteurs), autant que possible car le serveur de la communauté est down, et en cache il manque l'éssentiel
Depuis 2006, la robotique à plutôt pas mal avancé et la technologie aussi. Je voudrais donc le rendre plus léger, performant... et compatible !
en fouinant dans mes cartons j'ai trouvé une arduino méga, une nano, une pi2 et une kinect... ça fait une jolie colonne vertébrale pour tester du SLAM et remplacer le M3 si besoin
il y a quelques tuto la dessus, il va falloir que je m'y penche sérieusement...
je me demande si il n'est pas envisageable de faire gérer l'anti-collision à l'arduino avec l'algo neuronal présenté en ces lieux...
tandis que ROS sur le pi gérerait la création d'une map et les déplacement sur la MAP via le kinect, il y a un tuto (je cherche la ref que j'ai perdue) pour "lidarisé" les image de la kinect donc.. why not..et si le pi est trop faible, il faudra que je cherche une solution plus puissante.
Après avoir installer les 'bousins' ( virtual box !!) :
ubuntu xenial,
ros, freenect, impossible de trouver un tuto fonctionnels pour les base de ROS,
j'ai testé :
http://wiki.ros.org/ROS/Tutorials
mais mon anglais est limité pour la compréhension
https://fr.macerobot...er-votre-robot/
mais j'ai un bug lors du "catkin_make" avant l'urdf, visiblement il y a un dossier avec src/src..
autant dire que c'est mal baré...je bloque ..genre à la troisième commande
..c'est ..ennuyeux et me pousse à chercher des solution que j'aime moins du genre Microsoft robotic :/Mais ça ne me plait pas des masses
Image(s) jointe(s)
- Oliver17 aime ceci
















{kind=link}
{kind=link}