

Choix technique D2R2 autonome
Posté par sn290,
30 mars 2022
·
1â¯898 visite(s)
D2R2 RASPBERRY AUTONOME Circuit imprimé capteur
 Bonjour, suite de la présentation de mon projet:
Bonjour, suite de la présentation de mon projet:Je n'ai pas chercher bien longtemps pour choisir le matériel qui allait devenir le "cerveau" du robot: un RASPBERRY pi couplé a une interface électronique fait maison pour contrôler les moteurs et capteurs de position déjà existant.
j'ai choisi le Raspberry pi A+: plus compact et aussi moins gourmand en énergie.
pour l'alimentation j'ai trouvé ceci :
"Batterie Lithium-ion portable Super Rechargeable de haute qualité cc 12V 9800mAh avec prise"
https://www.google.c...=goW9mxqFpVyBxM
(je ne met pas de lien marchant mais on la trouve partout )
cette batterie compact offre une très bonne autonomie et intègre le circuit de charge et avec un câblage "entrée/sortie" facile a utiliser (voir photo)
je l'ai couplé à un petit abaisseur de tension a découpage haut rendement (oui je me bat pour l'autonomie
 ): Li-Ly XL4015 5A DC-DC
): Li-Ly XL4015 5A DC-DCet pour géré la charge par programmation j'utilise un circuit de mesure : Zero drift 219 INA219
Pour la lecture des données cela ce passe via le protocole I2C, j'ai donc choisi d'utiliser ce protocole pour les autres capteurs aussi (dans la mesure du possible)
autre capteur utilisé (pour le moment):
GY-US42 : Mesure de distance par ultrason
HMC5883L : compas 3 axes (une boussole électronique
 )
)Pour les capteurs de position, j'utilise des roues codées monté sur les moteurs, et un Ardruino nano qui a pour mission de lire les capteurs et en déduire la position dans un plan X / Y puis envois le résultat en I2C au Raspberry.
Pourquoi ce choix ???? (oui janticipe vos questions lol)
réponse: le Raspberry est déjà occupé à d'autres calculs et aussi a gérer la camera via un serveur HTTP qui menvoie l'image sur mon appli de commande. Il y a donc de possible temps de latence et cela nuit à la précision des mesures sur les capteurs de position.
L'ardruino ne fait que ça dans son coin et de manière fiable.(non il ne sennuie pas tout seul, ne vous inquiétez pas lol) il envois les données seulement quand on le lui demande, donc pas de "trou " dans les mesures , et il y a aussi le fait que je n'avais plus beaucoup de GPIO disponible sur le Raspberry.
enfin pour contrôler les moteur, voyants et autre capteurs, j'ai crée une carte électronique d'interface spécifique en m'appuyant sur des L293B.
dailleurs voici un site qui propose de faire vos circuits imprimé à moindre coût :
https://jlcpcb.com/
vraiment très satisfait du résultat
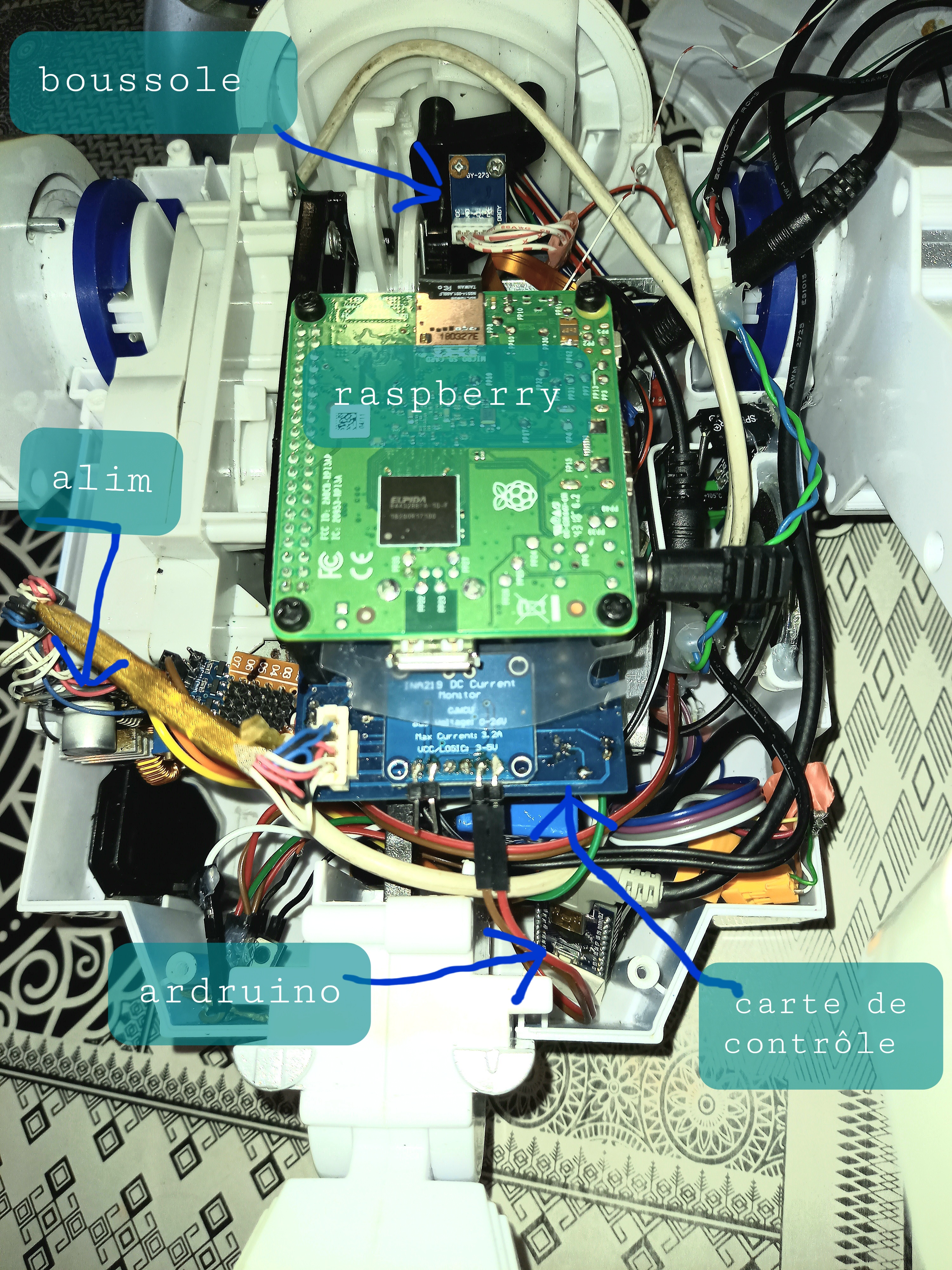
je vous met une photo de lintérieur du petit robot .. très tassé mais ça passe tout juste (comme on dit en Picard: "En'flic En'tasse et t'occupe point de s't'y qui passe" (range et tasse comme tu peux et ne t'occupe pas de ce que disent les autres))
Enfin, j'y ai donc ajouté une petite camera spécial RPI. juste pour le fun et pouvoir guider le robot avec la tablette.
Fin de ce billet: dans le prochain je parlerai du programme en cour de développement et de l'interface.

- clickeur aime ceci


















{kind=link}
Que devient ce robot ?